Zcheplennya - მთელი მექანიზმი, მომენტის გადაცემის აღნიშვნები, გადახვევა, გადაცემათა კოლოფში გადაადგილება, ასევე დისკის გლუვი კავშირი და დინება გადაცემის მექანიზმებთან. ამ დახმარებით თქვენ შეგიძლიათ დააფიქსიროთ ავარია მანქანით, შეცვალოთ გადაცემათა კოლოფი, გაასწოროთ მძლავრი ძრავით, მანევრირება სიჩქარის მკვეთრი ცვლილებით.
ძრავის ნაწილების გაცხელების მექანიზმი და მანქანის გადაცემის სწრაფი გამოშვება და გაყვანილობა სიჩქარის სწრაფი ჩართვით და სწრაფი გალავანიზაციით.
მაგალითად, სტატისტიკა გაოცდით ვიდეო გაკვეთილითრა გზით იქნა დემონსტრირებული მიზანმიმართულად, ისევე როგორც მანქანაში გათბობის პრაქტიკული მექანიზმი.
და მთავარია მანქანის რობოტული შეიარაღების პრინციპი, ამ ტიპის დრაივის დაყენება და მისი მიღება და იმის შესახებ, თუ როგორ სწორად გამოვიყენოთ შეიარაღების მექანიზმი მანქანებზე მექანიკური გადაცემათა კოლოფით.
მანქანის რობოტული შეიარაღების პრინციპი

მანქანის რობოტული კავშირის პრინციპს აქვს გლუვი კავშირი ორ მეტალის დისკს შორის: ერთი მყარი კავშირი ძრავის ლილვთან, ხოლო მეორე - გადაცემათა კოლოფთან.
გათბობის მექანიზმი შემოდის კაბელით, რომელიც პედლიდან მანქანის წინა მხარეს მიდის, წინა ნაწილის გარეშე შეერთების მექანიზმამდე. როდესაც დააჭერთ პედალს, დაინახავთ ვარდს და გადაცემის მოძრაობას.
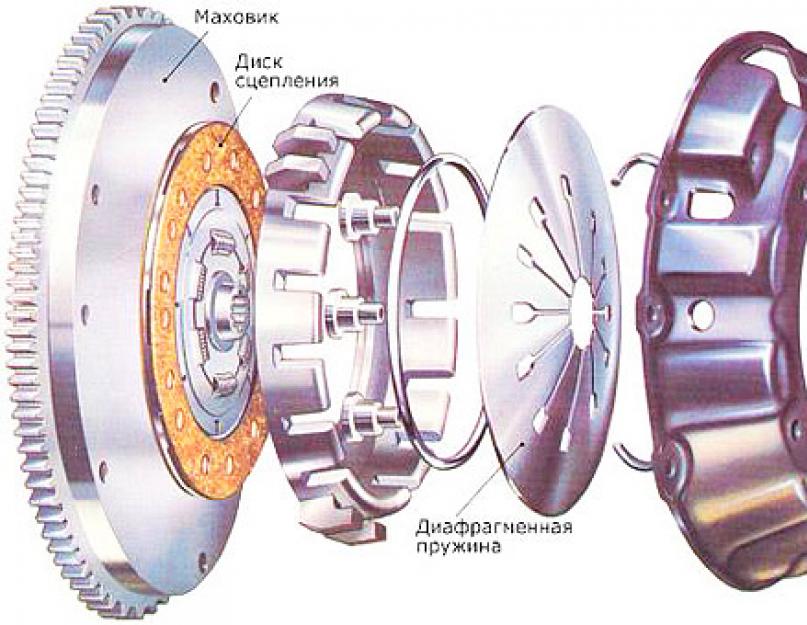
გათბობის მექანიზმის ძირითადი დეტალები:
- მფრინავი საჭესთან;
- მართვის დისკი (შეტევა);
- წამყვანი დისკი.
დისკს, რომელიც გადაეცემა Zusill dvigun-ს, ე.წ უზრუნველყოფა(ვინც იგივე თავდასხმა აბო "კატა" zchelennya). იგი დამაგრებულია დაკიდებული კავშირებით დალუქულ ფოლადის გარსაცმზე, რომელიც, თავისებურად, მყარად არის მიბმული ლილვის ბორბალზე. ამ ტიპის დამაგრება იძლევა სადენიანი დისკის გარსაცმთან დაკავშირების საშუალებას.
პრესის „კატის“ გვიან გადაადგილებით საფრენ ბორბალზე, დისკზე, წოდებები ქცევა... Vіn s'єdnaniyі გადაცემათა კოლოფის პირველადი ლილვიდან. სამუშაო მდგომარეობაში, დისკი ფიქსირდება საფრენ ბორბალსა და წნევის დისკს შორის და როდესაც პედალი დაჭერით პედალს, ის ჟღერს.
სითბოს ჩართვის სიგლუვეს იზრუნებთ დისკების ლიკვიდაციისთვის, სანამ ისინი კვლავ ერთი-ერთზე დაჭერით. სრული დისკისთვის, დისკი რხევა რამდენიმე ნაწილიდან, გამოყოფილი ზამბარის ფირფიტებით. ასევე, არსებობს სპეციალური უგულებელყოფა მასალებისთვის, რომლებიც გამძლეა გაცხელებამდე და გამოყენებამდე. შემტევი დისკი ასევე არის ზამბარიანი და სითბოს საიზოლაციო შუასადებები.
როდესაც პედლები იხსნება, წამყვანი და საკონტროლო დისკები მძლავრი ზამბარებით დაჭერილია საფრენ ბორბალზე, რაც დიზაინს ხისტი ხდის. ყუთის ლილვის შეკეთებისას, ამწე ლილვი სწრაფად იკვრება, გადაცემათა კოლოფი გადადის გადაცემის კვანძებში და წამყვანი ბორბლების მეშვეობით ბორბლებზე. საავტომობილო rushak z mistya.
Ale shvidkostі ორი valіv არ შეიძლება mittєvo გახდეს იგივე, მანქანა ზოგადად არის "ზოლიანი" და მოსაწყენი. ამისათვის კონტროლის პედლები შეუფერხებლად იხსნება, დამატებითი ძალებისთვის, რომლებიც აფერხებენ წამყვანი და ამოძრავებული დისკების სიცოცხლეს. შესაძლებელია ამაჩქარებლის პედალზე ზეწოლამ შეცვალოს ბორბლის შემოხვევის სიჩქარე და, როგორც ჩანს, მანქანის ბორბლის სისწრაფე.
ამ ტიპის სითბოს ეწოდება მშრალი, დისკები და მუდმივად დახურული. ეს ნიშნავს, რომ რობოტებს სჭირდებათ დისკების მშრალი ზედაპირი, პედლის გაშვებისას ისინი ერთმანეთთან ერთად არიან.
რობოტული დისკების პრინციპი

მანქანის რობოტული მართვის პრინციპი დაკავშირებულია მანქანის ამძრავთან, რაც ნიშნავს, რომ პედალი გადადის შერევის მექანიზმზე, რომელიც შეიძლება იყოს მექანიკური, ჰიდრავლიკური ან ელექტრო.
მექანიკურიშედეგი სტრუქტურულად მარტივია: მოგება არის ფოლადის კაბელი, რომელიც ურტყამს პედლის დარტყმას და მნიშვნელოვანია ჩართვისთვის. ახალზე, ღირს სწორ გზაზე ყოფნა, ასე რომ თქვენ შეგიძლიათ დაარეგულიროთ თოკი. პედალის დაჭერისას ასეთი დისკის დეფიციტი ზუსილზე მეტია.
გიდრავლიჩნიშედეგი კომფორტულია რობოტებისთვის, განსაკუთრებით მაშინ, როდესაც პრობლემას ხშირად აცნობენ. რობოტის პრინციპი გალვანზირებული სისტემის რობოტის მსგავსია: პედალს პედალზე დაჭერისას დგუში ამოიჭრება ფერდობზე, იკეცება ცილინდრებთან, რაც შტოვჰაჩევის რღვევას აძლევს დენის მნიშვნელოვან ჩართვას. . ამავდროულად, პედლები სუსტია, მაგრამ არ არის საჭირო ჰიდრავლიკური შლანგების წისქვილის მიდევნება და ჰიდრავლიკური ხაზების დონის და ხარისხის კონტროლი, რათა შესაძლებელი იყოს სისტემაში ჩასხმა.
ელექტროეს ჩანს მექანიკური ჯგუფიდან, როდესაც კაბელი გამოყვანილია ელექტროძრავიდან, რომელიც ირთვება პედლის დაჭერისას. უპირველეს ყოვლისა, ნაკლებად ჩანს, როგორც მექანიკური წამყვანი.

რობოტის პრაქტიკულ მხარეს, მანქანის კავშირები ძირითადად ეფუძნება მანქანაში სწორ ტრიალ ღილაკს, განსაკუთრებით მძღოლის მხარეს. ცოცხალ მოსკოვურ რუსეთთან ერთად, რობოტი იძულებული გახდა გამოეყენებინა პედალი, რათა მანქანა შეუფერხებლად ჩამოშლილიყო და მკვეთრი გალვანიზაციის არსებობის შემთხვევაში არ ჩაძირულიყო.
კობზე აუცილებელია გამაცხელებელი პედლის გაშვება, დისკების დახურვის მომენტის დაჭერა, დისკების სიჩქარის გაზრდა და შემდეგ შეუფერხებლად გაშვება. Orintir არის რიგი dvigun wraps. Yaksho dvigun არის pratsyu rіvnomіrno, tse ნიშნავს, რომ გაყვანილობა ჩართულია სწორად.
თვალის ჩაკვრა მოხსნის მას დაწყების, გადაცემათა კოლოფის შეცვლისა და მანქანის გამორთვისას. ვიმოგას ეკლესიის გამარჯვება მსახურების ვადის გასაგრძელებლად.
- რა თქმა უნდა, თქვენ არ გსურთ დენის პედლის გაშვება დასაწყისში, რათა დააჩქაროთ დისკების სამუშაო ზედაპირის მუშაობა.
- ზუპინკა სვიტლოფორებზე, როდესაც პედლები დაჭერილია და მექანიზმი ჩართულია, კარგად არ არის აღიარებული რობოტულ წნევის ზამბარებზე, საკისრზე და ჩანგალზე.
ნაოჭების მექანიზმში ორი ძირითადი უთანასწორობაა - დისკების ტექნიკური ნაკლებობა და მეორეს მხრივ.
- პირველ ვიპადზე სრიალებს, მანქანასთან კი დამპალი დინამიზმია მანქანაში. განვიხილოთ ამოძრავებული დისკის, ხახუნის ბალიშების ცვეთა შედეგი.
- მეორეს აქვს არაჩვეულებრივი ვარდის პრობლემა, როცა გადაცემათა კოლოფი ჩართულია და პედალს დააჭერს, მანქანა დაიწყებს მუშაობას.
თუ უთანასწორობა არ შეიწოვება დისკის რეგულირებით, მაშინ საჭიროა თავად მექანიზმის შეკეთება სტაციონარულ გონებაში.



