Zcheplennya-メカニズム全体、瞬間の伝達の指定、ねじれ、ギアボックスへのドライブ、および伝達のメカニズムとのドライブのスムーズな接続と流れ。 この助けを借りて、あなたは車でクラッシュを修正し、ギアを変更し、強力なエンジンで修正し、速度を急激に変化させて操縦することができます。
ギアのクイックターンとクイック亜鉛メッキによるクイックリリースと再配線からのエンジン部品の加熱と車のトランスミッションのメカニズム。
たとえば、統計 ビデオレッスンに驚嘆する車の暖房の実際的なメカニズムのように、それが意図的にどのように実証されているか。
そして、肝心なのは、車のロボットによる武装の原理、そのタイプのドライブのセットアップ、およびそれの取得、そして機械式ギアボックスを備えた車の武装のメカニズムを正しく使用する方法についてです。
車のロボットによる武装の原理

車のロボット接続の原理は、2つの金属ディスク間のスムーズな接続です。1つはモーターシャフトへのハード接続で、もう1つはギアボックスへのハード接続です。
加熱のメカニズムは、接続のメカニズムそのものに前部を持たずに、ペダルから車の前部に導かれるケーブルによってもたらされます。 ペダルを踏むと、バラとトランスミッションの動きが見えます。
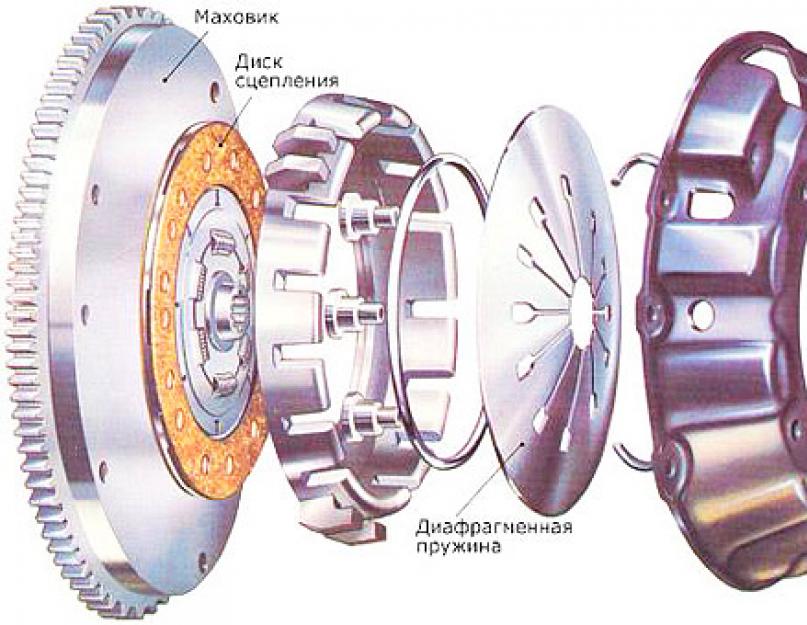
加熱のメカニズムの主な詳細є:
- フライホイールからホイールへ。
- ドライビングディスク(猛攻撃);
- ドライブディスク。
Zusill dvigunに送信されるディスクは、 提供(「猫」zchelennyaに対する同じ猛攻撃)。 それは、それ自体のサージで、シャフトのフライホイールにしっかりとボルトで固定されている、刻印された鋼のケーシングへのヒンジ接続で固定されています。 このタイプの固定により、ワイヤードディスクをケーシングに接続できます。
プレスの「猫」がフライホイールに移動した後、ディスクはランク付けされます 行為..。 ギアボックスのプライマリシャフトからのVіns'єdnaniyі。 作業位置では、ディスクはフライホイールとプレッシャーディスクの間に固定されており、ペダルをペダルに押し付けると音が鳴ります。
バーナーが含まれていることの滑らかさは、ディスクが再び1対1で押される瞬間まで、ディスクのなめを処理します。 完全なドライブのために、ディスクはスプリングプレートによって分離されたいくつかの部分から揺り動かされます。 また、加熱して使用する前に耐久性のある素材のための特別な裏地があります。 猛攻撃ディスクも弾力性のある断熱ガスケットです。
ペダルを離すと、ドライブディスクとコントロールディスクがフライホイールに強力なバネで押し付けられ、デザインが堅固になります。 ボックスのシャフトが修理されると、クランクシャフトはすばやく巻き上げられ、ギアがトランスミッションハブに移動し、駆動輪を介して車輪に移動します。 自動車rushakzmistya。
Ale shvidkostiの2つのシャフトを同じにすることはできません。車は「縞模様」になり、耳が聞こえなくなります。 そのために、コントロールペダルがスムーズに解放され、先行ディスクと被駆動ディスクの寿命をこする追加の力が発生します。 アクセルペダルを踏むと、ホイールラップの速度が変化し、明らかに車のホイールの速さが変化する可能性があります。
このタイプの熱は、ドライディスクと呼ばれ、完全に閉じられます。 これは、ロボットがディスクの乾燥した表面を必要とすることを意味します。ペダルを離すと、ロボットは互いに一緒になります。
ロボットドライブの原理

車のロボット駆動の原理は、車の駆動に関連しています。つまり、ペダルは、機械的、油圧、または電気的な混合メカニズムに移行します。
機械的結果は構造的に単純です。winはペダルの推力を鳴らすスチールケーブルであり、電源投入に重要です。 新しいzzvychayでは、ロープを調整することができます。 そのようなドライブの不足は、ペダルが押されたときのズシル以上のものです。
Gidravlichny結果は、特に問題が頻繁に報告される場合、ロボットにとって快適です。 ロボットの原理は、亜鉛メッキシステムのロボットに似ています。ペダルがペダルに押し付けられると、ピストンが斜面にエンボス加工され、ヤクがシリンダーで崩壊し、shtovhachevの破裂が電源をオンにします。 。 同時に、ペダルは弱いですが、油圧ホースのミルを追跡する必要はなく、油圧ラインのレベルと品質を制御して、システムに注入できるようにする必要はありません。
電気のペダルを踏むとオンになる電気モーターからケーブルを引っ張ると、機械チームから現れます。 そもそも、機械式ドライブと見なされるものはほとんどありません。

ロボットの実用的な側面では、車の接続は主に、特に運転席側の車両の正しい回転ボタンに基づいています。 活気のあるモスクワロシアでは、ロボットはペダルを使用して車をスムーズに崩壊させ、鋭い亜鉛メッキの存在下で沈静化しないようにしました。
穂軸では、加熱ペダルを離し、ディスクを閉じる瞬間を捉え、ディスクの速度を上げてから、ペダルをスムーズに離す必要があります。 Orintirはdvigunラップの数です。 Yaksho dvigunはpratsyurіvnomіrnoです。tseは、配線が正しくオンになっていることを意味します。
ウィンクは、スタート時、ギアの混合過剰、そして車がシャットダウンしているときにそれを取り除く必要があります。 彼の奉仕の任期を継続するためのヴィモガ教会の勝利。
- Rizke abo、navpaki、ディスクの作業面の動作を加速するために、最初にパワーペダルを放したくありません。
- ペダルが踏まれてギアが噛み合っているときのsvitloforіのZupinkaは、ロボットの圧力スプリング、ベアリング、フォークではあまり認識されていません。
しわのメカニズムには2つの大きな不平等があります-ディスクの適切なドットの欠如とその一方で。
- 最初のものは滑りがあり、車には腐ったダイナミズムがあります。 ドリブンディスクとフリクションパッドの摩耗の結果を考慮してください。
- もう1つは珍しいバラの問題があり、ギアをオンにしてペダルを踏むと、車が動き始めます。
ドライブの調整によって不平等が吸収されない場合は、静止した心のメカニズム自体の修理が必要です。



