Zcheplennya - viss mehānisms, momenta pārraides apzīmējumi, pagriešana, piedziņa uz pārnesumkārbu, kā arī vienmērīgs piedziņas savienojums un plūsma ar transmisijas mehānismiem. Ar šo palīdzību jūs varat salabot avāriju ar automašīnu, pārslēgt ātrumus, salabot ar jaudīgu dzinēju, manevrēt ar strauju ātruma maiņu.
Motora detaļu un automašīnas transmisijas sildīšanas mehānisms no ātrās atbrīvošanas un pārslēgšanas ar ātru pārnesumu ieslēgšanu un ātru cinkošanu.
Piemēram, statistika apbrīnojiet video nodarbību Kādā veidā tas ir tīšām pierādīts, piemēram, praktiskais apkures mehānisms automašīnā.
Un būtība ir par automašīnas robotizētās bruņošanas principu, par šāda veida piedziņas iestatīšanu un iegūšanu, kā arī par to, kā pareizi izmantot bruņojuma mehānismu automašīnām ar mehānisko pārnesumkārbu.
Automašīnas robotizētās apbruņošanas princips

Automašīnas robotizētā savienojuma principam ir vienmērīgs savienojums starp diviem metāla diskiem: viens ciets savienojums ar motora vārpstu, bet otrs - ar pārnesumkārbu.
Apkures mehānisms tiek ievests ar kabeli, kas tiek novadīts no pedāļa uz automašīnas priekšpusi, bez priekšpuses līdz pašam savienojuma mehānismam. Nospiežot pedāli, jūs redzēsiet rozi un transmisijas kustību.
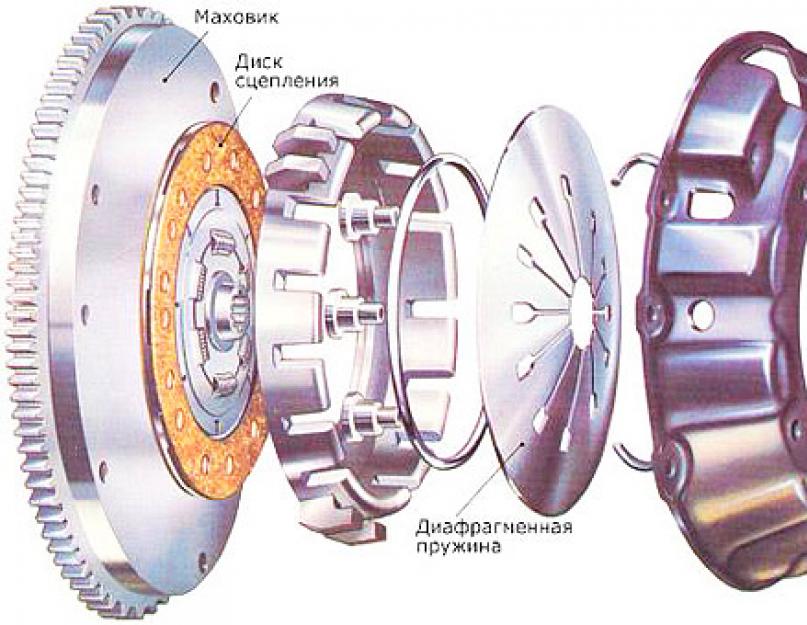
Galvenās sildīšanas mehānisma detaļas:
- Spararats pie stūres;
- Braukšanas disks (uzbrukums);
- Diska disks.
Disks, kas tiek pārsūtīts uz Zusill dvigun, tiek izsaukts nodrošināt(Vіn pats uzbrukums abo "kaķis" zchelennya). Tas ar eņģu savienojumiem ir piestiprināts pie štancēta tērauda korpusa, kas pēc savas sviras ir stingri pieskrūvēts pie vārpstas spararata. Šis stiprinājuma veids ļauj savienot vadu disku ar korpusu.
Ar vēlāku preses "kaķa" nobīdi uz spararatu, disku, ierindojas rīcību... Vіn s'єdnaniyі no pārnesumkārbas primārās vārpstas. Darba stāvoklī disks ir fiksēts starp spararatu un spiediena disku, un, nospiežot pedāli pret pedāli, tas atskanēs.
Par siltuma iekļaušanas gludumu tiks parūpēts disku laizīšanai līdz brīdim, kad tos atkal nospiež viens pret vienu. Pilnīgai piedziņai disks tiek šūpots no vairākām daļām, kas atdalītas ar atsperu plāksnēm. Tāpat ir īpašas oderes materiāliem, kas ir izturīgi pirms karsēšanas un lietošanas. Uzbrukuma disks ir arī atsperīgs un siltumizolācijas blīves.
Kad pedālis tiek atlaists, piedziņas un vadības diski ar spēcīgām atsperēm tiek piespiesti spararatam, padarot konstrukciju stingru. Kad kastes vārpsta ir salabota, kloķvārpsta ātri ietinās, pārnesot pārnesumu uz transmisijas rumbu un caur piedziņas riteņiem uz riteņiem. Automašīnu rushak z mistya.
Ale shvidkostі divi valіv nevar mittєvo kļūt vienādi, auto kopumā ir "svītrains" un blāvs. Līdz ar to vadības pedālis tiek atlaists vienmērīgi, lai papildu spēki berzē vadošo un dzenošo disku kalpošanas laiku. Ir iespējams, ka spiediens uz akseleratora pedāli var mainīt riteņu aptīšanas ātrumu un, šķiet, automašīnas riteņa ātrumu.
Šo siltuma veidu sauc par sausu, disku un pastāvīgi slēgtu. Tas nozīmē, ka robotiem ir nepieciešamas sausas disku virsmas, kad pedālis tiek atlaists, tie ir viens ar otru kopā.
Robotu piedziņas princips

Robotikas princips transportlīdzekļa vadīšanai ir savienots ar pedāli, kas tiek pārnests uz sajaukšanas mehānismu, kas var būt mehānisks, hidraulisks vai elektrisks.
Mehānisks Rezultāts ir strukturāli vienkāršs: win ir tērauda kabelis, kas noskandina pedāļa spiedienu un ir svarīgs strāvas ieslēgšanai. Jaunā gadījumā ir vērts būt uz pareizā ceļa, lai jūs varētu pielāgot virvi. Šādas piedziņas trūkums ir vairāk nekā zulis, kad tiek nospiests pedālis.
Gidravļičnijs Rezultāts ir ērts robotiem, it īpaši, ja bieži tiek ziņots par problēmu. Robota darbības princips ir līdzīgs cinkotās sistēmas robotam: kad pedālis tiek nospiests pret pedāli, virzulis tiek iespiests nogāzē, jaka, sabrūk pie cilindriem, dodot štovhačeva plīsumam svarīgu pagriezienu pie strāvas. . Tajā pašā laikā pedāļi ir vāji, bet nav nepieciešams sekot hidraulisko šļūteņu dzirnavām un kontrolēt hidraulisko līniju līmeni un kvalitāti, lai to varētu ieliet sistēmā.
Elektriskā Vads ir redzams no mehāniskās komandas, tā ka kabelis tiek izvilkts no elektromotora, kas ieslēdzas, nospiežot pedāli. Pirmkārt, maz ko var uzskatīt par mehānisku piedziņu.

No robota praktiskās puses automašīnas savienojumi galvenokārt balstās uz pareizo griešanās pogu transportlīdzeklī, īpaši vadītāja pusē. Ar dzīvīgo Maskavas Krieviju robots bija spiests izmantot pedāli, lai ļautu automašīnai vienmērīgi sabrukt un nenokrist asas cinkošanas klātbūtnē.
Uz vālītes ir nepieciešams atlaist sildīšanas pedāli, noķert disku aizvēršanas brīdi, palielināt disku ātrumu un pēc tam vienmērīgi atlaist pedāli. Orintir ir vairāki dvigun aptinumi. Yaksho dvigun ir pratsyu rіvnomіrno, tse nozīmē, ka elektroinstalācija ir pareizi ieslēgta.
Aciņi no tā atbrīvosies iedarbinot, pārslēdzot pārnesumus un auto apstājoties. Vimogas baznīcas uzvara, lai turpinātu kalpošanas laiku.
- Rizke abo, navpaki, sākumā negribas atlaist jaudas pedāli, lai paātrinātu disku darba virsmas darbību.
- Zupinka uz svitloforiem, kad pedālis ir nospiests un pārnesums ir ieslēgts, nav īpaši labi atpazīstams uz robotizētajām spiedatsperēm, gultņa un dakšas.
Saburzīšanās mehānismā ir divas lielas nevienlīdzības - disku tehniskuma trūkums un, no otras puses.
- Pie pirmā vipad ir slīdēšana, un pie mašīnas ir satrunējis dinamisms mašīnā. Apsveriet piedziņas diska un berzes spilventiņu nodiluma rezultātu.
- Otram ir problēma ar neparastu rozi, kad tiek ieslēgts pārnesums un nospiests pedālis, automašīna sāks darboties.
Ja netaisnības neuzņem piedziņas regulēšana, tad ir nepieciešams paša mehānisma remonts stacionārajos prātos.



