Adesea, atunci când cumpărați sau instalați o bară de tractare, vi se va solicita un „bloc uzgodzhennya”. Pick-up - pentru cine este necesar și pentru care nu este posibil să fie interconectat cu un set universal extravagant de electricitate pentru conectarea unei bare de remorcare la acea mașină.
Smart Connec t - din limba engleză îl puteți schimba, ca „conexiune inteligentă”. Este același mod de a vedea conexiunea electrică la alte vehicule echipate cu circuite electronice pliabile și computere de bord.
În mașinile moderne, se numește așa-numitul can-bus (can-bus), fie unul dintre tipurile de autobuze analogice și digitale. Can-bus este necesar pentru a controla sistemele de siguranță pliabile și sistemele de confort la conducere (ABS, ESP, TSP etc.). Sistemul, în felul său, poate trece cu ușurință fără a fi nevoie de senzori, de la senzorul de piele pentru a trece prin cel puțin un fir, astfel încât can-shina poate fi conectat la conexiunea unui număr mare de fire.
Kan-shinoyu keruє computer de bord, dacă toate semnalele au fost trimise pentru a merge de-a lungul a două fire. Dacă este necesar să primiți un semnal de cântat într-o mașină solicitantă, va fi instalată și o unitate de decriptare adecvată, care poate fi utilizată cu un semnal (un senzor, un motor și un mecanism).
Am vipadku cu bara de remorcare în autoturism situația viglyadє prin gradul ofensiv. Înaintea decodificatorului blocurilor liniilor de lumină spate ale mașinii (picioare, dimensiuni, lumini de ceață, semnalizatoare, intrare și intrare din spate) Vino două săgeți și ieși aproximativ zece. Teoretic, este posibil să încercați să vă conectați înainte de fire, chiar dacă decodificatorul nu este instalat și să nu instalați unitatea Smart Connect. Dar nu este atât de simplu, este păcat, cu un astfel de test care conectează mașina la sistemul de control al verificării (CC). Podvіyne zbіlshennya naukantazhennya prin coafuri svіtlotechnіki pentru a produce până la capăt sprijinul mizei. La propriul computer, computerul de bord al mașinii vidreagu pe nezumіle zmіna sili struma. Reacția poate fi destul de diferită, atunci când încercați să conectați lanceta, când luminile din spate sunt greșite, la cele mai recente „erori” din tehnologia luminii și când ieșiți din calea universităților auto. Axa unor astfel de inconveniente este unitatea Smart connect.
Cum mă pot conecta prin Smart Connect?
Electricitatea cu unitatea can-bus poate fi de asemenea conectată, deoarece este o putere universală extraordinară - prin apăsarea clemelor pentru conexiuni paralele. Conexiunea Ale se realizează la unitate și nu la priza barei de remorcare. Unitatea uzgodzhennya în sine este conectată la baterie sau la cablul sub tensiune. Într-un astfel de caz, atunci când conectăm coafura, veți primi doar un semnal clar pentru a porni acea sursă de alimentare electrică și o veți rupe la priza barei de remorcare în altă parte prin ieșirea către unitatea de conectare inteligentă, deoarece alimentarea este furnizată din bateria de la bord bezposeredno. În plus, a pierdut puterea în sistemul electric al mașinii, care controlează computerul de bord, Win pur și simplu nu restabilește conexiunile cheie nerecunoscute. Unitatea universală a uzgodzhennya este instalată pe un număr mare de mașini moderne.
Puteți merge la magazinul de coafură.
Important!
Dacă mașina dvs. este echipată cu un mod de remorcare, dacă utilizați conectarea inteligentă, modul nu va funcționa. Pentru activarea unor astfel de moduri și a unora dintre celelalte moduri, este necesar să selectați unitățile originale pentru o anumită mașină.
Până când mașinile din ziua respectivă sunt prezentate pe toate cele mari. Puteți fi în siguranță, confort pentru o oră, ecologic și economic în mod constant.
Noile produse tehnice devin din ce în ce mai eficiente, iar numărul de produse devine din ce în ce mai ambițios. Acest lucru este în progres, este foarte bun. Voi progresa pentru un astfel de vin, de exemplu, ABS, fără perne, cresc instalare automată bucată climatică; există doar o mică parte din ultimii zece ani bătăuș în designul mașinii.
Dezvoltarea creșterii face parte, de asemenea, din sistemele electronice. În mașinile obișnuite, în prezența unei clase și echipate cu o mașină, există între 25 și 60 de sisteme electronice, care sunt responsabile pentru toate acestea conectate cu un fir.
În cele mai extraordinare tipuri de vechi, ghidajele, cablurile de trandafiri și tampoanele suplimentare sunt mici, cu dimensiuni maiestuoase, dintre care multe sunt procese virobnichi foarte costisitoare. Nici măcar nu par să fie vorba despre probleme, acestea putând fi descoperite în timpul diagnosticării pentru o privire asupra neregulilor din astfel de mașini. Pentru mecanici, ei s-au resemnat la o glumă proastă și plictisitoare de nedreptate, pentru care au plătit un client și au plătit scump. Schimbul de anexe keruyuchimy interschimbabile date cu o astfel de tehnologie rămâne, de asemenea, între mijlocul tinerilor.
Istoria autobuzului CAN
Prin urmare, în 1983, industria automobilelor și-a anunțat nevoia ca o mamă să aibă un astfel de sistem comunal, întrucât se afla în tabăra universității să fie situată între ea într-o singură frontieră și să asigure schimbul necesar de tribut. Sistemul este vinovat de raportarea către astfel de vimogs:
- nu multă parțialitate în scara de gri
- clădire în timp real pentru shvidkodiya
- temporalitatea
- un pas mare de răpire din fabricile electromagnetice
Sistem de schimb de date Nayposhirenisha - CAN-bus
- 1983 Ear of CAN Rosette (Bosch)
- 1985 Urmărește cooperarea cu Intel pentru dezvoltarea cipului
- O mie nouă sute cincizeci de ori Primul tip CAN de serie de la Intel Company a fost reparat prin introducerea CAN pentru autoturisme avantajoase
- 1991 Perche zasosuvannya CAN in mașină gri(Clasa S)
- +1994 Introducerea standardului internațional pentru CAN (ISO 11898)
- 1997 Perche vikoristannya CAN în salon (clasa С)
- 2001 Vikoristannya CAN în mașini mici (Opel Corsa) în tracțiuni și caroserii
Înseamnă CAN?
CAN înseamnă Controller Area Network
Transmisia anulează danih CAN-BUS
- schimb de date date care trebuie afișate pe toate laturile decilcomului cu anexe keruyuchie
- Posibilitatea semnalelor de preluare bagatoraz în senzorii senzorilor
- chiar și temporal viteza transmisiilor
- vâscozitate scăzută, zavdyaki tipuri diferite control în timpul transmiterii tributului
- pentru a extinde posibilitățile, solicitați-l suficient pentru a face modificări în programul de securitate
- sistemul CAN este standardizat în lumina lumii, ceea ce înseamnă că este posibilă schimbul de date cu atașamentele suplimentare ale noilor virobnik
Deci și CAN-BUS?
Sistemul de transmisie al acestor autobuze CAN poate fi prezentat la vizualizatorul autobuzului. Așa este, ca un autobuz de indicatoare pentru transportul fără pasageri, așa este
Sistem CAN-bus pentru transmiterea fără informații. Fără un sistem CAN-bus, toate informațiile necesare ar putea fi transferate către dependințele unui număr mare de vechi. Tse înseamnă că pentru informații despre piele, dar un canal conductiv este de vină.
Transmisii CAN-bus suplimentare, numărul de suplimente se va schimba. Întregul schimb de informații între anexele principale va fi trimis prin maximum două ghiduri. La galuze de automobile există o nouă tehnologie pentru producția de bunuri. Trăsături pe scurt discernibile ale acțiunilor acestora.
Schema Zirka
- în spatele schemei „zirka”, toate elementele schimbului de date sunt blocate într-un singur centru (blocul keruvannya)
- dacă unitatea de control merge greșit, atunci se va prăbuși
Schema „kіlce”
- pentru schema „kіlce” toate elementele vor fi schimbate cu datele de autodeterminare.
- Dacă introduceți din anexa A la marginea B, informațiile sunt vinovate de a trece printr-o ancoră.
- Dacă cineva încearcă să greșească, atunci ieșiți din calea sistemului ca întreg.
- Reînnoirea tributului poate fi efectuată și mai ușor, dar pentru întreaga nevoie, trebuie să reparăm operațiunea timp de o oră.
schema de linii
- semnalul de transmisie este răspândit de-a lungul liniei în ambele direcții.
- întrucât este clar să nu ieși din ton, se decide să prodovzhuyut schimbul de date între noi.
Atașați sistemul și faceți schimb de date
Diagrama liniară este cel mai des utilizată la mașini, în ansamblul statisticilor este vizualizată și diagrama sistemului CAN-bus.
- Merezheviy vuzol: Microcontroler de intrare nou, controler CAN și driver de autobuz
- microcontroler Sarcini pentru controlul neîntreruperii controlerului CAN și prelucrarea datelor necesare.
- Controler CAN Semnificații pentru asigurarea modurilor de transmisie și recepție.
- Boosdriver Voi asigura transmisia, precum și o voi primi.
- Canal de legătură: Este un conductor cu două nuclee (pentru ambele tipuri de semnale: CAN-High și CAN-Low). Pentru schimbarea tranzițiilor electromagnetice, conductorii ecranului.
- jumper de margele: Un rezistor navantage de 120 volți va ajuta semnalul lunar să apară în dorințele ghidului și semnalul va fi învățat.
Mărgele Yak pratsyuє?
Transferul tributului pentru un CAN-bus suplimentar se bazează pe principiul unei conferințe telefonice. Participantul (blocul keruvannya) își iubește informațiile (dan) în linia de transmisie, la acea oră, pe măsură ce participanții „aud” informațiile. Participanții la Deyakі cunosc toate informațiile despre cіkava și vikoristovuyu її. Інші doar ignoră її.
Mașina a fost reparată, ușile de pe partea apei au fost închise la nebunie. Pentru a trece peste proces, modulul de verificare-control are nevoie de două informații:
- mașina se prăbușește.
- ușile din partea apei se deschid.
Informațiile sunt trimise la contactul ușii senzorului / și se transformă într-un semnal electric. Toate semnalele electrice sunt reconvertite, acum în informații digitale, iar în cazul unui cod dublu, acesta va fi suprascris de canalul de transmisie a datelor, atâta timp cât nu vă așteptați să obțineți o potrivire bună. Dar dacă există un semnal despre înfășurarea roții, atunci semnalul este necesar pentru aceleași anexe, de exemplu, pentru o anexă. Există, de asemenea, multe alte mașini echipate cu un sistem activ de control al șasiului. Este întotdeauna o problemă de timiditate să schimbi mentalitatea pentru a optimiza poziția mașinii pe drum. Toate informațiile trec prin margele și pot fi analizate de un participant la skin.
Sistemul de transmisie Danih CAN-bus este un sistem Multimaster - un sistem cu acces multiplu, ceea ce înseamnă următorul pas:
- toate universitățile (universitățile sunt situate) sunt egale.
- toată duhoarea din lumea rivniy poate avea acces la sistemele de autobuze, problema neregulilor și controlul mesajelor.
- instituția de învățământ superior cu cicuta din piele poate fi autosuficientă și fără ajutorul altei instituții de învățământ superior cu păr încrucișat, puteți obține acces la canalul de transmitere a tributului.
- de îndată ce este introdusă o universitate de lux, atunci nu șterge calea întregului sistem ca întreg.
În sistemele de acces multiple, accesul la transmisie este necontrolat, astfel încât, atât timp cât canalul de transmisie al acestor afișaje, accesul este disponibil
o mulțime de universități fanteziste. Yakbi a devenit astfel încât toate informațiile au fost trimise dintr-o dată de la tot dzherel, apoi instruind haosul bi-nou
Tse ar fi putut aduce tributul „zitknennya”. Otzhe, este necesar să coaseți în ordine. În acest sens, în sistemul CAN-bus, este cel care se face vinovat de trimiterea informațiilor către cei mai buni și care este vinovat de trimiterea informațiilor. Cu programele universităților de nivel scăzut, există un grad ridicat de dexteritate; Zgіdno chergovostі, tributul de la dreptul de prioritate superioară pentru a îmbunătăți data la tributul de la dreptul de prioritate mai mare inferioară. Ori de câte ori transferul de fonduri de la o instituție emisferică cu cea mai mare prioritate, atunci acesta din urmă este automat.
Yak face ієраrhіya (logică de transmisie) în sistemele CAN-bus?
fund:
Adesea, când veniți din anexă, vi se va solicita siguranță tehnică, de exemplu, de la unitatea de control ABS,
Cea mai importantă prioritate este acordată unității de comandă a acționării.
În sistemele CAN, există o distincție între transmisiile dominante și recesive. Valoare rivn recesivă 1 și dominantă
chiar și valoarea 0. Acum, întrucât o mulțime de blocuri de control alimentează imediat transmiterea rîvniei dominante și recesive, atunci keruyuchy
pristіy s dominante rіvnem în dreptul de a ghida dvs. de la vizita în Persha Chergu.
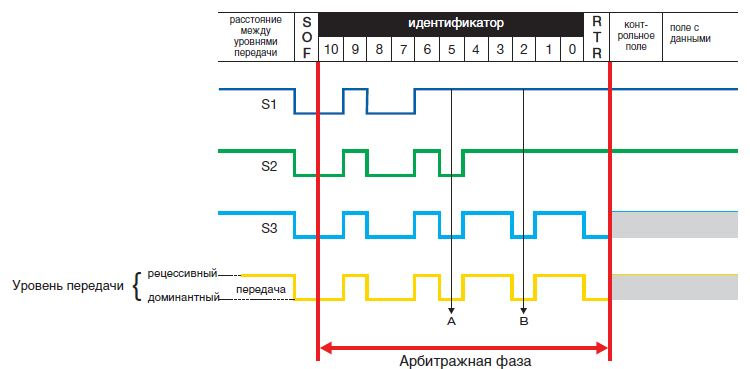
Pe toate aplicațiile este posibil să se explice accesul înainte de transmiterea datelor. În acest vypadku trei linii de universități doresc să transfere în funcție de sistemele lor de date. Înainte de ora procesului de evaluare a arbitrajului - alegerea ratingului - unitatea de control S1, întrerupe transmiterea acestuia la punctul A, astfel încât etapa recesivă ar trebui să se facă cu parametrii dominanți ai S2 și S3.
S2-ul puternic vă va întrerupe transmisia în punctul B din același motiv ca anterior. Cu un astfel de rang, partea de sus a băncii este curată S3, astfel încât să puteți transmite acum știrile dvs.
Deci este protocolul Danih?
Transferul tributului se efectuează conform protocolului de tribut chiar și într-o oră scurtă. Protocolul este stocat într-un număr maiestuos de biți și informații, listate în ordine de cântare. Numărul de biți se află în dimensiunea câmpului tribut. Bit є cea mai mică unitate de informații, vedem biți setați octet = trimis. Mesajul este trimis într-o formă digitală și poate fi rotit cu valori de 0 sau 1.
Transferul tributului către autobuzul CAN într-un autoturism
Avem 2 sisteme de autobuz CAN în mașinile noastre actuale:
Transmisie autobuz de mare viteză - High = Speed-Bus (ISO 11898)
- SAE CAN Clasa C.
- transmisie tribut 125 Kbit / s - 1 Mbit / s.
- lungimea transmisiei de până la 40 de metri la 1 Mb / s.
- ieșire transmisie> 25 mA.
- rata scăzută de trai.
- până la 30 de universități tricotate.
Stabilirea propriilor transmisiuni de tribut de profil înalt (transmiterea informațiilor critice în modul în timp real în milisecunde), sistemul bus tsya
Știam că unitățile de acționare erau blocate în unitățile de acționare, erau legate între ele într-o singură margine pentru a controla motorul, transmisia, trenul de rulare și galmele.
Transmisie de putere - Autobuz cu viteză redusă (ISO 11519-2)
- SAE CAN Clasa B.
- Transmisie Danih 10 Kbit / s - 125 Kbit / s.
- cantitatea maximă de unelte
- flux de transmisie de ieșire< 1 мА.
- sistem st_yka într-o scurtă licărire.
- rata scăzută de trai.
- până la 32 de universități tricotate.
Sistemul își cunoaște propriul depozit în salon, deconectând împreună cu el însuși într-o singură plasă componentele universităților electronice ale corpului electronicii de la bord,
pentru confort.
Diagnosticarea sistemului CAN-BUS
Posibile defecțiuni ale sistemului de magistrală CAN:
- bărbieritul furnizorului.
- uluit pe masu.
- pierzându-se pe baterie
- Mingling CAN-High / CAN-Low ..
- Zanadpentru o durată de viață redusă a bateriei / reîncărcați bateria.
- vizibilitatea jumperilor de rezistență.
- Arcurile sunt pereskod, de exemplu, pisica este defectă, este greșit să te trezești la semnal.
Șoc greșit:
- reconvertiți sistemul în robot.
- solicitați băncii neregulilor.
- Familiarizați-vă cu schimbarea caracteristicilor dinamice.
- introduceți semnalul pe ecranul osciloscopului.
- reconsiderați pragul.
- ghiduri vimіryati opіr.
- vim_ryatiy op_r jumpers de rezistență.
Șocați motivele greșite
Înaintea unui cob, o glumă despre cauza unei inegalități este necesară în această mașină pentru anexe suplimentare, după cum se poate
în sistemele de transmisie accesul la sistemele de transmisie a informațiilor. Puteți prinde, dar ca urmare a pătrunderii în sistem, bulul câștigat este distrus. Este posibil ca eventualele defecțiuni ale sistemelor de transmisie să fie găsite din cauza factorilor defecțioși. Virishnim є cei care sunt capabili să împingă virobnikul. Poate exista un indiciu greșit pentru un instrument suplimentar pentru diagnosticare, dacă aveți un instrument special în comanda dvs. sau puteți utiliza un tester și un osciloscop în comanda dvs. De asemenea, este și mai important pentru mame în datele lor speciale comandate despre mașină (circuite electrice, raport pentru a descrie sisteme de transmisie etc.)
Timp de o oră există o glumă a nedreptății, totul este unul, pentru ajutorul unui tester sau a unui osciloscop, este necesar să se lucreze la operațiuni, să se ia o decizie structurală. Aceasta înseamnă că diferența poate fi localizată, să iertăm „promițătoare”, astfel încât să puteți fi folosit în roboți, trebuie să vă legați doar de cei mai potriviți. Pentru ca Wee să o poată vedea în locul potrivit, voi adăuga o glumă de nedreptate unei anumite mașini. În vipadku tse bude (corpul nostru W210).
Bulo a declarat despre nedreptatea care urmează:
Geamul din sticlă din partea pasagerului nu funcționează.
Reconsiderarea preselecției:
1. Este posibil să se toarnă în fereastra de sticlă cu ajutorul apei?
În general, ofensarea atașamentului de comandă a ușii, sistemul de magistrală CAN și motorul electric al ridicatorului de geamuri se află în stația de lucru. Incomparabilitatea polyaga, ymovirno, în podul vimikach al ferestrei de sticlă din partea pasagerului.
Qi poate fi mai rapid cu alte funcții (de exemplu, schimbarea poziției oglinzii)?
Deoarece este posibil să accelerați cu aceste funcții, este necesar să ieșiți din calea atașării comenzilor ușii și a sistemului CAN-bus pentru a fi amplasat în stația de lucru. motiv prost defecțiuni є defectarea regulatorului de fereastră vimikach din partea apei sau a motorului electric al regulatorului de fereastră din partea pasagerului. Prețul poate fi zyasuvati, precum și reconvertirea funcției de pe locul pasagerului. Dacă geamul de sticlă este pratsyuє, atunci motorul electric poate fi pornit. Pentru o glumă de nedreptate, este necesar să vă așezați pe vimikachi din partea apei.
În măsura în care apa poate fi adusă în tren cu funcțiile posesiei, fiind de partea pasagerului, este foarte posibil, deoarece cauza inegalității este incompatibilitatea sistemului CAN-bus sau incomparabilitatea keruyuchuyu add-on.
Măsurarea imaginii corecte și incorecte a osciloscopului


Pentru a conecta osciloscopul la sistemul CAN-bus, trebuie să cunoașteți modul corect de conectare. De regulă, ar trebui să vă aflați pe liniile de culoare roz între atașamentele keruyuch și ghidul autobuzelor CAN date. La fundul nostru din partea pasagerului, în canalul de cablu de sub bara canalului (minunați-vă de cei mici), există un decalaj potențial.

Aici, în jurul furnizorilor de autobuze CAN din principalele anexe, acestea converg deodată. Puteți conecta osciloscopul fără nicio dificultate la distribuția potențială.

Dacă osciloscopul conectat nu detectează niciun semnal, atunci este evident că transmisia acestor autobuze CAN este deteriorată. Pentru ca aceasta să fie importantă, în locul în care există o inegalitate, acum este necesar să venim cu niște trandafiri. Cu o mulțime de sposter în spatele osciloscopului afișat. De îndată ce un semnal apare pe ecranul osciloscopului, sistemul CAN-bus va ști cum să funcționeze. Incomparabilitatea se găsește în sistemul legat cu trandafiri. Toate plug-in-urile înainte de trandafiri trebuie așezate pe locul respectiv. Începutul dezvoltării câmpului constă în faptul că este important pentru cel mai cheruyuyu atașament de a pune trandafiri, care este considerat a fi sisteme incomparabile. Aici virobnikul nu poate produce tribut.
Pentru a face mai eficientă greșeala și mai eficientă, trebuie să cunosc metoda de eșantionare, deoarece sistemul în sine nu funcționează. Dacă caracteristicile tributelor mașinii sunt evidente, sistemul electric este echipat și blocurile de control sunt schimbate, sistemul poate fi greșit fără a fi nevoie de energie suplimentară. Conectarea trandafirilor la CAN-bus de pe atașamentul principal și pornirea trandafirilor pe distribuitorul potențial se poate datora faptului că motivul defecțiunii se află în conexiunea prin cablu sau în atașamentul principal. Dacă semnalele pot fi recunoscute pe osciloscop, atunci sistemul CAN-bus este situat în stația de lucru, iar cablul este situat și în stația de lucru. Dacă semnalul de pe osciloscopul semnalului de pe osciloscop nu reușește atunci când semnalul este conectat la anexă, atunci motivul inegalității polului se află în inegalitatea anexei în sine. Dacă s-a stabilit faptul inadecvării conexiunii prin cablu, atunci, în absența unui opir și a unei deversări, este posibil să se producă o întârziere pe masu, fie pentru un plus, fie pentru o confuzie între fire.

În mașinile care nu prezintă diferența de potențial, zgomotul greșitului este semnificativ mai mare. Osciloscopul se conectează la firele CAN-bus în cel necesar pentru întregul computer (de exemplu, pe unitatea de control roz). Pentru că este necesar, pe baza cunoștințelor, să se găsească toate universitățile și există un autobuz CAN de la unitatea de control. Pentru o gamă largă de utilizatori, este, de asemenea, necesar să aveți documentație tehnică cu date despre mașini, vizibilitate, modul în care sunt amplasate și distruse universitățile. Înainte de conectarea trandafirilor și a conectării trandafirilor, este necesar să verificați imaginile de pe ecranul osciloscopului. Debutul evenimentelor nu pare a fi liniștit, deoarece acestea erau pe fundul mașinii noastre.
Pentru a schimba jumperii rezistenței, este necesar ca magistrala CAN să fie amplasată în modul Sleep. Universitățile vor fi găsite în timpul desfășurării întâlnirii. Zagalny opir, deoarece este stocat în paralel cu includerea acelorași rezistențe de 120 Ohm, devin 60 Ohm. Prețul este determinat atât de furnizorii CAN-High, cât și de CAN-Low.
Instalarea anexelor suplimentare
Instalarea de atașamente suplimentare, de exemplu, sisteme de navigație, pentru roboții care trebuie să elimine semnalele din sistemele CAN-bus, este o problemă de pliere. Vona polyagaє, în primul rând, pentru a cunoaște locul potrivit pentru acces, de exemplu, înainte de a opri semnalul la viteza mașinii, dar nu este ușor să vedeți documentația tehnică a mașinii.
Puteți găsi informații despre modalitățile și metodele de conectare și instalare a atașamentelor suplimentare pe site-ul foarte important. În același timp, nu oferă nicio garanție, așa că, în orice caz, toată rizik-ul pe sine este îngrijit de transportul cu motor principal, deoarece va fi văzut ca atare. Cu toate acestea, în orice mod, cel mai bun mod este să cunoașteți documentația tehnică a virobnik-ului mașinii. Pentru a învăța de la noi sisteme mobile CAN-autobuz, vivchit și transferul tributului, primordial, către robot și sunetul greșelilor, la distanță - cum puteți instala atașamente suplimentare în orice vypad, este posibil să treceți navchannya speciale.
Autobuz CAN - IntroducereProtocolul CAN este un standard ISO (ISO 11898) în domeniul ultimei transmisii de date. Protocolul împărțirii cu un ochi pe victorian în suplimentele de transport. CAN-ul actual sa extins într-o gamă largă de aplicații și poate fi utilizat în sisteme de automatizare industrială, precum și în transport.
Standardul CAN este stocat de la nivelul fizic și nivelul de transmitere a banilor, care se datorează unui număr de tipuri diferite de probleme, regulilor de gestionare a conflictelor la accesarea autobuzului și prevenirii problemelor.
Protocol CAN
Protocolul CAN al descrierilor din standardul ISO 11898-1 poate fi descris pe scurt de gradul ofensator:
Transfer fizic rivn vikorist diferențial al tributului pe torsiunea aburului;
Pentru a gestiona accesul la autobuz, puteți utiliza rezolvarea neconformă a conflictelor;
Uneori poate exista o cantitate mică de bani (există 8 octeți de bani) și furate cu o sumă de control;
Uneori, pe zi, există adrese explicite, este posibil ca pielea să se răzbune pe valoarea numerică, deoarece controlează numărul de pe anvelopă și poate servi și ca identificator în același timp;
Schema de prelucrare a grațierilor a fost gândită, așa că mă voi asigura că voi repeta transferul prăzii, atâta timp cât duhoarea nu va avea un rang adecvat;
є Efectiv pentru izolarea bolilor și vizualizarea universităților sănătoase din autobuz.
Protocoale de vishnyh rіvnіv
În sine, protocolul CAN în sine este mai puțin important, deoarece pachetele de date mici pot fi mutate infinit de la punctul A în punctul B din spatele centrului comunitar suplimentar. Win, yak și slіd bulo ochіkuvati, nu există nimic de spus despre cei care controlează fluxul; transferați un număr mare de omagii, dar nu fiți încadrați într-un mesaj de 8 octeți; nі despre adresele universităților; stabilirea unei zile etc. Acest punct se bazează pe protocolul de nivel superior (HLP). Termenul HLP se bazează pe modele OSI și șapte linii.
Protocoalele alimentelor ryvnya sunt vikorystovyutsya pentru:
Standardizarea procedurii de lansare, inclusiv vibratorul transmiterii de date;
Rozpodil adresa de la mijlocul universităților interconectate sau tipurile de timp;
Viznachennya razmіtki povіdomlen;
asigurând ordinea prelucrării grațierilor la nivelul sistemului.
Potrivit pentru un grup de corystuvach etc.
Una dintre cele mai eficiente modalități de a vă spori competența în domeniul CAN este de a participa la roboți, de a lucra în cadrul grupurilor existente de oameni. Dacă nu-ți planifici frații, voi participa activ la robot, ceea ce este o veste bună pentru grupul koristuvach. Introducerea conferințelor este un alt mod bun de a arunca informații corecte și corecte.
Produse CAN
La un nivel scăzut, există două tipuri de produse CAN disponibile pe piața deschisă - microcircuite CAN și instrumente CAN. pentru mai mult rivn inalt- Există două tipuri de produse: module CAN și instrumente de proiectare CAN. O gamă largă de aceste produse sunt disponibile pe piața deschisă într-o oră dată.
CAN brevete
Brevetele, care pot fi completate cu CAN, pot fi de diferite tipuri: implementarea sincronizării și frecvențelor, transmiterea unor seturi mari de tributări (în protocolul CAN, cadrele date în cea mai mare parte sunt de 8 octeți) etc.
Sisteme de control distribuite
Protocolul CAN este o bază bună pentru dezvoltarea sistemelor de control. Metoda de soluționare a conflictelor, care poate fi utilizată ca CAN, va avea grijă de faptul că universitatea din piele CAN se va ocupa de aceste evenimente, deoarece va fi aplicată universității date.
Sistemul de control distribuit poate fi descris ca un sistem, calculând efortul căruia este distribuit între universitățile sistemului. Opțiunea Protylezhny - un sistem cu procesor central și puncte I / O locale.
mai CAN
Autobuzul CAN este utilizat înaintea autobuzelor de zonă largă. Tse înseamnă că toate universitățile pot „auzi” toate transmisiile. Nu este ușor să trimiteți despre o anumită universitate, totul fără vina, universitatea va accepta totul în legătură cu aceasta. Setarea CAN, cu toate acestea, nu oferă posibilitatea filtrării locale, astfel încât modulul de piele poate reacționa la el doar ori de câte ori este posibil.
Adresare CAN
CAN vikoristovuє pentru un timp relativ scurt - cantitatea maximă de câmp de informații este de 94 de biți. Ori de câte ori există o adresă explicită, este posibil să se numească conținutul-adresa: în locul unui implicit (rang implicit) al identității destinatarului.
tipi ocazional
Există 4 tipuri de mesaje (sau cadre) care sunt transmise prin magistrala CAN:
Cadru Danih (Cadru de date);
Cadru la distanță;
Cadru de eroare;
Cadru de suprasarcină.
Cadru Danikh
Pe scurt: "Vă sunt recunoscător tuturor, є omagiu adus lui Markuvans X, vă sunt recunoscător!"
Rama Danih este cel mai frecvent tip de ocazie. Merită să te răzbuni în astfel de părți de bază (detaliile nu sunt vizibile de dragul puterii):
Arbitrajul, așa cum ar trebui să fie, dacă există două sau mai multe universități care se luptă pentru o anvelopă. Câmp de arbitraj pentru a se răzbuna:
În cazul CAN 2.0A, identificator de 11 biți și un bit, bitul RTR este cel inițial pentru cadre.
În cazul CAN 2.0B, identificator de 29 de biți (care poate înlocui și doi biți de primit: SRR și IDE) și bit RTR.
Câmp de date, care poate fi preluat de la 0 la 8 octeți de date.
Câmpul CRC (Câmpul CRC), pentru a dezvălui o sumă de control pe 15 biți, este util pentru majoritatea părților cazului. Qia controlează suma vicaristilor pentru descoperirea grațierilor.
Slot de confirmare. Controlorul de piele al CAN, care a fost corect pentru a corecta aspectul cazului, a dat bitul de recunoaștere a stării pielii. Acceptarea unei modificări a aspectului unui pic de recunoaștere, deoarece nu apare, se blochează mereu.
Nota 1: Prezența mesajului pe anvelopă nu înseamnă nimic, cu excepția faptului că planurile de destinație ale destinatarului sunt eliminate. Singur, este evident că este faptul de a ne exonera de responsabilitate corect de către unul sau altul dintre nodurile autobuzului.
Nota 2: Identificatorul din domeniul arbitrajului, neafectat de numele său, nu este necesar să îl identificați în orice moment.
Cadru dat CAN 2.0B („CAN standard”).
Cadru dat CAN 2.0B („extensii CAN”).
cadru de vizualizare
Pe scurt: „Toată lumea este recunoscătoare, există o modalitate de a aduce tribut lui Mark X?”
În plus, cadrul este chiar mai asemănător cu cadrul tribut, dar cu două notificări importante:
Este clar că semnificațiile cadrului sunt afișate (bit RTR în domeniul arbitrajului є recesiv) și
Vіdsutnya câmp tribut.
Principalul cadru zavdannyam vіddalennogo ized energizat pentru a transfera tributul corespunzător cadrului. Dacă, să zicem, universitatea A a depășit cadrul cu parametrul de câmp ARBITRAGE egal cu 234, atunci universitatea B, dacă este un rang adecvat, este inițializată, se face vinovată că atârnă în cadrul cadrului dat cu parametrul de câmp ARBITRAJ 234.
Cadrele de la distanță pot fi utilizate pentru a implementa controlul traficului de autobuz de tip „pornit”. Cu toate acestea, în practică, nu este suficient să adăugați o fotografie. Nu este atât de important, deoarece standardul CAN nu pedepsește copiii așa cum este menit aici. Un număr mare de controlere CAN pot fi programate astfel încât duhoarea să revină automat la cadru sau să înlocuiască procesorul local.
Є un truc, legat cu un cadru: Codul lungimii datelor se face vinovat de instalarea unei frunze noi curățate la final. În primul rând nu va exista niciun conflict.
În unele cazuri, este necesar ca o universitate care să trimită cadrul în cadru, după ce a început transmisia, deoarece va recunoaște identificatorul, un astfel de rang va „derula” cadrul gol. Tse іnshy vipadok.
Cadru de eroare
Pe scurt (toate dintr-o dată, cu voce): „OH, IUBIȚI, SA SPROBUMO din nou”
Error Frame este o ocazie specială când încălc regulile de formare a cadrelor de către CAN. Ar trebui să încercați să o faceți, dacă universitatea a găsit-o pentru dvs. și pentru ajutor suplimentar universității, o veți găsi pentru ea - și puterea poate fi pentru a administra un cadru de grațiere. Transmisia va încerca automat să trimită din nou. Există o schemă bine gândită pentru colectarea grațierilor, care este un garant că universitatea nu poate perturba transmiterea tributelor prin transmiterea repetată a cadrelor grațierilor.
Cadrul grațierii este să răzbune pe înaintașul grațierii (Flag Flag), care este stocat în 6 biți de aceeași valoare (acest ordin încalcă regula introducerii biților) și delimitatorul grațierii (Error Delimiter), care este stocat în 8 biți recesivi. Rangerul grațierii este un spațiu grozav, în care una dintre universități cauciucurile își pot regla grațierea, pentru a face prima iertare a grațierii.
Cadru de suprasarcină
Pe scurt: „Sunt deja ocupat cu 82526 mici, nu am putea alege doar un pic de pâine?”
Un cadru perevantazhennya zgaduєtsya aici doar pentru a transforma imaginea. Datorită formatului vinului, acesta este similar cu un cadru de grațiere și este transferat la universitatea ocupată. Cadrul este reîncurcat vikoristovuє De fapt, singurul controler care va genera reîncâlcirea este prețul vechi 82526.
Extensii standard și CAN
O colecție de standard CAN prin configurarea ID-ului identificatorului în câmpul de arbitraj este egală cu 11 biți. Piznishe, pe baza extensiilor buv standard ale cumpărătorilor. Noul format este adesea denumit CAN extins (CAN extins), deoarece permite identificarea a cel puțin 29 de biți per identificator. Pentru distribuirea a două tipuri de cadre, trebuie să faceți rezervări pentru biți în câmpul de control al câmpului de control.
În mod oficial, standardul este numit rang ofensiv -
2.0A - numai cu identificatori de 11 biți;
2.0B - versiune extinsă cu identificatori de 29 de biți sau 11 biți (o puteți schimba). Se poate folosi Vuzol 2.0B
2.0B activ (activ), astfel încât transmisia și
2.0B pasiv (pasiv), astfel încât vom putea skim derapajul până la lărgirea cadrului (ale, minuneți-vă în partea de jos).
1.x - să fie respectat specificațiile și reviziile originale.
În ora actuală, noile controlere CAN vor fi actualizate la tipul 2.0B. Un controler de tip 1.x sau 2.0A ajunge la ședință, după ce a redus arbitrajul cu 29 de biți. Controlerul 2.0B pasiv să accepte їх, пізнає, dacă duhoarea este vіrni і, uneori - piele; un controler 2.0B este activ și poate fi transmis și eliminat după cum este necesar.
Controlere 2.0B și 2.0A (așa merge, ca în 1.x) sum_snі. Puteți vikoristovuvati pe toate pe aceeași anvelopă până la momente de liniște, atâta timp cât controlerul 2.0B va fi mulțumit de cadrele extinse.
Unii oameni susțin că CAN-ul standard este „mai bun” decât CAN-ul extins și că, în unele cazuri, CAN-ul extins este mai mult tribut de serviciu. Nu este neapărat așa. Dacă utilizați câmpul Arbitraj pentru transmiterea datelor, atunci cadrul CAN extins poate fi mai mic decât datele serviciului, sub cadrul CAN standard.
CAN de bază (CAN de bază) în CAN de ieșire (CAN complet)
Termenii CAN de bază și CAN complet iau știul în „copilul” CAN. Dacă trageți controlerul CAN Intel 82526, vi se va oferi programatorului o interfață în stil DPRAM. Apoi, Philips a ajuns la modelul 82C200, în care a fost instalat modelul bazat pe FIFO al programului și interconectarea filtrării. În scopul recunoașterii celor două modele software, oamenii au început să numească metoda Intel - Full CAN și metoda Philips - Basic CAN. Numărul actual actual de controlere CAN acceptă modele de programe ofensatoare, nu același lucru este cazul cu termenii CAN complet și de bază CAN - de fapt, termenii pot fi vicios pentru un ticălos și vartoy ieșit din viață.
De fapt, controlerul Full CAN poate fi interconectat cu controlerul CAN Basic și Navpacks. Probleme cu resimțirea zilei.
Ultima săptămână de conflicte privind anvelopele și prioritatea noilor informații
Apariția conflictelor de-a lungul timpului (procesul, în urma căruia există doi sau mai mulți controlori CAN, care vor folosi autobuzul) este și mai importantă pentru semnificația disponibilității reale a transmisiei pentru transmiterea datelor.
Dacă controlerul CAN poate începe un transfer, dacă autobuzul este inactiv. Tse poate duce la faptul că doi sau mai multe controlere primesc transmisia peste noapte (mayzhe) o oră. Conflictul este considerat un astfel de rang. Trimiteți universitatea aici pentru a monitoriza anvelopa în timpul procesului de actualizare. Întrucât instituția de învățământ superior a devenit dominantă la acea oră, deoarece instituția însăși este responsabilă de ryven recesiv, ea se pierde inocent în procesul de soluționare a conflictului și va fi acceptată. Evenimentul unui conflict este vizibil pe întregul câmp de trafic și, deoarece întregul câmp este vizibil, o singură transmisie rămâne pe anvelopă. Danemarca vuzol să continue transferul, deoarece nu este nimic de mâncat. Cele mai potențiale transmisii vor încerca să transmită performanțele lor imediat ce sună anvelopa. Procesul de rezolvare a unui conflict nu se pierde timp de o oră.
Un motiv important pentru rezolvarea cu succes a conflictului este nefericirea situației, când două universități pot transfera același domeniu la arbitraj. Trei reguli є o vinatka: de îndată ce nu te răzbuni pe tribut, atunci fie că o universitate poate transfera timpul.
Oskіlki, autobuz CAN є autobuz cu atașamente atașate pentru tipul „cu fir-ȘI” și bitul dominant (bitul dominant) є logic 0;
Pitannya: Cum va deveni deodată, cum încearcă o școală universitară să o vadă mai târziu?
Sugestie: Vuzol, zoosumilo, a jucat în cazul unui conflict și a finalizat cu succes transmiterea ocaziei. Dacă este timpul să fie recunoscută ... universitatea nu schimbă partea dominantă a aprobării regiunii, așa că transmisiilor ar trebui să li se acorde iertare, să trimită iertare, să trimită valoarea colegului său de grațiere la cea de-a 8-a transmisie. Acest ciclu se va repeta de 16 ori, apoi transmisiile vor intra în starea de iertare pasivă. Sub rezerva unei reguli speciale din algoritmul pentru schimbul de iertare, semnificația unui iertător care nu transferă iertare este mai mare, deoarece universitatea are statutul de iertare pasivă și aprobare de iertare є iertare. Pentru aceasta, universitatea va fi fericită cu transferul pentru totdeauna, până în liniște, atâta timp cât nu va fi ocazie.
Adresa și identificarea site-ului
Din nou, nu este nimic înfricoșător în faptul că nu există adrese exacte în unele mesaje CAN. Controlerul skin CAN va tăia tot traficul autobuzului și pentru o combinație suplimentară de filtre hardware și software și va porni - „tsikavit” data viitoare, chi ni.
De fapt, în protocolul CAN, adresa și adresa sunt vizibile. Înlocuitorul unui vizitator este de a începe cu un identificator, care este aici în prezent. Pe de altă parte, CAN poate fi numit „conținut-adresă”.
Cântând pratsyu адреса se adresează astfel: "Tse povіdomlennya pentru universitatea X". Adresarea conținutului ocazional poate fi descrisă după cum urmează: „Nu există niciun motiv pentru a ne răzbuna pe datele de la marketerii X”. Rіznitsya mіzh tsimi în două concepte este mică, ale suttєva.
În locul câmpului de arbitraj, este acceptat, conform standardului, pentru desemnarea programului pentru anvelopă. Toți controlorii CAN vor putea gestiona tot (acțiunile - doar o parte) câmpul arbitrajului ca cheie în procesul de filtrare hardware.
Standardul nu înseamnă că domeniul arbitrajului este în mod evident vinovat de victorie în calitatea de identificator al ocaziei. Tim nu face mesaje, chiar dacă opțiunile sunt extinse.
Notă despre valoarea identificatorului
Am spus că identificatorul este de 11 (CAN 2.0A) sau 29 (CAN 2.0B) bit. Prețul nu este invariabil. Pentru tâmpenia bătrânilor, controlerul CAN (ghici ce?), Identificând nevinovat de mama a 7 biți superiori instalați într-o unitate logică, că identificatorii de 11 biți în valorile disponibile 0..2031 și numărul de identificatori ai celor 298 de biți.
Respect, toți ceilalți controlori CAN acceptă identificatorii „greșiți”, deci în special Sisteme CAN Identificatorul 2032..2047 puteți vikoristovatisya fără agitație.
Parametrii fizici CAN
CAN autobuz
Codul vicoristului autobuzului CAN fără a se transforma la zero (NRZ) cu inserarea de biți. Există două semnale diferite: dominant (logic 0) și recesiv (logic 1). Duhoarea este sugestivă pentru a cânta râpe electrice, cum să vă întindeți ca o râpă fizică vicioasă (їkh kіlka). Modulele sunt conectate la autobuz urmând schema cu fir AND: dacă o universitate dorește să transfere autobuzul în tabăra dominantă, atunci întregul autobuz se află în aceeași stație, postura depinde dacă universitățile transferă moara recesivă.
Різні fizic рівні
chiar fizic Proiectarea conexiunilor electrice și schema de transmitere a semnalelor prin magistrală, suport extern pentru cablu etc.
Există un număr mic de versiuni mai noi de echivalente fizice: Vom extinde versiunea, care este utilizată de standardul CAN, parte a ISO 11898-2, și este un circuit de semnal echilibrat cu două fire. Se mai numește CAN de mare viteză.
O altă parte a standardului ISO 11898-3 descrie un circuit de semnalizare echilibrat cu două fire - pentru o magistrală mai mică. Nu este nimic de îngrijorat, astfel încât transmiterea semnalelor poate fi banală în acest caz, dacă unul dintre fire este anulat, scurtcircuitează la „masă” sau în stația Vbat. Acest circuit se numește CAN de viteză redusă.
SAE J2411 descrie o rotație fizică cu un singur fir (plus la sol, zoosomilo). Câștigă vikoristovuєtsya în principal în mașini - de exemplu, GM-LAN.
Іsnuyut kіlka proprієtarnih fіzichnih rіvnіv.
Au trecut orele, dacă driverele CAN nu au dispărut, au fost adăugate modificările RS485.
De regulă, fizic, nu puteți interacționa cu voi înșivă. Deyakі kombіnatsії poate pratsyuvati (chi bude bun, cât miros mirositor) în minți bune... De exemplu, acceptarea vitezei mari și a vitezei mici se poate face numai pe o singură anvelopă.
Majoritatea absolută a receptoarelor CAN sunt disponibile de la Philips; numărul virobnik-urilor include Bosch, Infineon, Siliconix și Unitrode.
Cea mai răspândită acceptare este 82C250, sub forma realizărilor parametrilor fizici, descriși de standardul ISO 11898. Versiunea este 82C251.
Extinderea acceptării pentru „CAN de viteză redusă” - Philips TJA1054.
viteza maxima transmiterea datelor despre anvelope
Viteza maximă de transmitere a datelor prin magistrala CAN, conform standardului, Dorivnyu 1 Mb / s. Cu toate acestea, controlerele CAN pot suporta viteza de 1 Mb / s și pot fi utilizate în suplimente speciale.
CAN de viteză redusă (ISO 11898-3, div. Vishche) se aplică la viteze de până la 125 kbit / s.
O magistrală CAN cu un singur fir în modul standard poate transmite date de la o viteză de aproape 50 kbit / s, iar într-un mod special de mare viteză, de exemplu pentru un program ECU, este aproape de 100 kbit / s.
Viteza minimă de transmitere a datelor pe anvelope
Fie ca în mintea ta să nu-ți permiți să vibrezi valoarea inferioară a cântării. De exemplu, dacă alegeți 82C250 sau 82C251, puteți seta cu ușurință viteza la 10 kb / s, dar dacă utilizați TJA1050, nu puteți seta viteza la mai puțin de 50 kb / s. Fiți conștienți de specific.
Cantitatea maximă de cablu
Cu viteza de transmisie de 1 Mb / s, cantitatea maximă de cablu poate fi de până la 40 de metri. Prețul este legat de schema vizibilă a transmiterii conflictelor, dar din cauza frontului semnalului, mama este responsabilă de capacitatea de a merge la cea mai îndepărtată universitate și de a se întoarce înapoi. Cu alte cuvinte, cablul este înconjurat de o greutate redusă. S-au analizat propuneri pentru îmbunătățirea calității luminii, s-au văzut ceva mai mult coroborat cu problemele intergalactice.
Cablul maxim (nshі (valoare aproximativă):
100 de metri la 500 kbit / s;
200 de metri la 250 kbit / s;
500 de metri la 125 kbit / s;
6 kilometri la 10 kbit / s.
În ceea ce privește protecția izolației galvanice, se utilizează optocuploare, viteza maximă a anvelopelor este probabil să accelereze. Fericit: ridicați cele mai rapide optocuploare și vă întrebați la recepția semnalului din anexă și nu la viteza maximă de transmitere a datelor în specificitate.
Kintseve schimb de shini
Autobuzul CAN către standardul ISO 11898 se poate termina cu un terminator. Ajungeți prin instalarea unui rezistor cu un suport de 120 Ohm pe capătul pielii anvelopei. Termynuvannya are două scopuri:
1. Obțineți semnalul afișat pe autobuz.
2. Perekonatysya, scho va elimina post-struma (DC) egală.
Autobuzul CAN către standardul ISO 11898 este obligat să fie terminat independent de її ї ї ї dvydkostі. Voi repeta: autobuzul CAN către standardul ISO 11898 este obligat să fie terminat independent de Statele Unite. pentru roboți de laborator Puteți înlocui un terminator. De îndată ce autobuzul dvs. CAN poate naviga atunci când există terminatori, sunteți doar fericit.
Respect, scho інші fizic рівні O astfel de CAN de viteză redusă, o magistrală CAN cu un singur fir, poate fi utilizată, dar nu poate fi văzută ca terminator de magistrală terminală. Dacă aveți un autobuz CAN de mare viteză la standardul ISO 11898, veți avea nevoie de un singur termen.
cablu
Standardul ISO 11898 impune ca cablul să fie nominal 120 Ohm, dar este permisă o valoare de interval a suportului Ohm.
Puțini dintre ei, unii dintre ei sunt prezenți pe piață, cablurile sunt mulțumite de cim vimogam. Є valoare mare, dar valoarea intervalului suportului va fi extinsă în viitor.
ISO 11898 descrie o pereche care este ecranată sau neecranată. Robot IDE standard SAE J2411 cu un singur fir.
obosi CAN-autobuz Bula a fost lansat la sfârșitul anilor 80 de Robert Bosch GmbH (Nimechchina) ca o soluție pentru sistemele de distribuție care pot fi operate în timp real. O caracteristică specifică a anvelopei este protecția la depășire. Înainte ca autobuzul CAN să fie conectat, viteza depinde de problemele mecanice - răutatea furnizorilor de autobuz către firul străin, sau altfel nu pot duce la ieșirea din freeware-ul suplimentelor. Mai mult, modificările anvelopei se fac în cazul unuia dintre ghidaje.
CAN autobuz în cusături promislovye
Autobuzul CAN polonez (rețeaua de control a zonei) se caracterizează prin transmisii de mare viteză și imunitate la zgomot, precum și prin capacitatea de a genera fast. Industria canabisului este practicată pe scară largă în domenii precum auto și transport privat, Promislova Automation, Aviation, Systems and Access Control. Conform datelor Asociației CiA (CAN in Automation, www.can-cia.de), există aproape 300 de milioane de universități CAN în funcțiune astăzi. Nimechchina are un autobuz CAN împrumutat de la primul loc pentru popularitatea anvelopelor poloneze mijlocii.
Caracteristicile protocolului CAN Inversări CAN
O tendință majoră în domeniul automatizării poligoanelor este înlocuirea sistemului tradițional de control centralizat pe baza distribuției controlului gateway-ului, a distribuției senzorilor intelectuali și a mecanismelor visonavich ale ordinii cu procesul kerovan. Prețul creșterii numărului de apeluri efectuate, creșterea numărului de apeluri, diagnosticarea pliabilă a grațierilor și problemele cu probleme. Conexiunea dintre universitățile unui astfel de sistem și vă ajută pentru ajutorul autobuzului polonez. CAN este un sistem de conectare pentru mai multe sisteme de control. Există mai multe rapoarte despre transferuri și motive CAN, în spatele cărora CAN este din ce în ce mai extins.
Standard Viprobation. Protocolul CAN este urmărit activ de mai bine de 20 de ani, ceea ce este și mai important pentru astfel de zone conservatoare, cum ar fi transportul privat sau construcția navală. CAN a fost dezvoltat în 1980 de Robert Bosch pentru industria auto. Interfață CAN pentru reglementări conform standardelor internaționale ISO 11898 pentru calitate înaltă și ISO 11519-1 pentru suplimente de viteză redusă. Disponibilitatea redusă a controlerelor CAN pe piață are un raport calitate / productivitate bun. Nevoia de vizibilitate se datorează structurii liniare a autobuzului și a universităților echitabile, așa-numita multi-masterat (Multi Master Bus), cu o universitate CAN puteți refuza accesul la autobuz. Dacă se întâmplă, poate fi trimis la una sau la alte universități. Toate universitățile citesc simultan din autobuz una și aceleași informații, iar aspectul de la ele este trimis, pentru a accepta informațiile date sau pentru a le ignora. Recepția de o oră este și mai importantă pentru sincronizarea în sistemele de control. Universitățile Vidmovili sunt conectate la centrală prin autobuz.
Visoka stіykіst dosyagaєtsya zavdyaki strangulată în fază pereshkod diferentsіalnim transceiver robotі vbudovanih mehanіzmіv viyavlennya pomilok (un neviyavlennya pomilka 1000 rokіv la schodennіy 8 Godin robotі MEREZHI pe shvidkostі 500 Kbіt / s), al povіdomlen repetiție pomilkovih, vіdklyuchennya de disfuncționalitate vuzlіv od obmіnu de shinі i stіykostі la plante electromagnetice.
Nu este ușor să ajungeți la o conexiune simplă la autobuz și la autobuzul universităților CAN, în plus, numărul de universități nu este limitat de protocolul de la nivelul inferior. Informațiile despre adresă se găsesc ocazional și în funcție de prioritatea sa, pentru care va funcționa arbitrajul. Procesul robotului poate modifica prioritatea datelor transmise. De asemenea, înseamnă posibilitatea de a programa frecvența și faza semnalului de transmis și a arbitrajului, dar nu de a distruge structura în caz de conflicte. La nivel fizic, există o varietate de tipuri de linii de transmisie: de la pariuri de răsucire ieftine la linii de fibră optică.
Robotul în timp real este capabil să pornească mecanismele de interacțiune la nivel scăzut (multi-stăpânire, pe scară largă, arbitraj beat-up) în plus față de o viteză mare de transmisii de date (până la 1 Mb / s), înregistrarea rapidă a reacției în starea actuală a lucrurilor.
CAN suplimentar
CAN Soluții ideale pentru orice programe, microcontrolere care să fie interconectate unul câte unul și unul de la celelalte anexe periferice. O selecție de CAN vikoristovavavsya în mașini pentru asigurarea criticilor pentru o oră de gestionare și schimb de informații între motor și cutie de viteze la o oră garantată de curățare și admiterea participantului de piele în cantitatea de date la roboți. Comanda este de a ajunge la soluții costisitoare de înaltă calitate, de a găsi și soluții economice pentru conectarea la rețeaua de dependințe economice de energie, care se poate face într-o scară de o oră, sute de microsecunde. Cu o mulțime de fire electrice tensionate, acestea sunt întrerupte de o rețea CAN cu două fire, cum ar fi noduri, inclusiv acționări galvanice și indicatoare de viraj.
Disponibilitatea largă a cunoștințelor CAN în industria automatizării, există un număr mare de unități de control, senzori, mecanisme, acționări electrice și alte dispozitive, care sunt conectate la un singur ciclu tehnologic (sisteme de comandă a pompelor,. D.). O caracteristică importantă a acestor sisteme este abilitatea de a diagnostica și gestiona obiecte care au fost zguduite într-un teritoriu excelent, conform algoritmilor adaptivi. Ca urmare, există o schimbare sută la sută a efortului de trai, a zgomotului, uzurii instalației. Există o imagine a spontanilor sisteme de la bord, De virіshalnі role іdіgіnі swіdіdnіdіdnіm pіdssystems in recrutarea serviciilor, usi zincate, controlabile si diagnostice.
chiar fizic
Nivelul fizic al magistralei CAN este o „instalare și” conexiune între anexe, conectată la acesta. Liniile de semnal diferențiale se numesc CAN_H și CAN_L, iar în stația statică sunt numite cu un potențial de 2,5 V. Log. 1 (bit recesiv) înseamnă linia de autobuz, când există un nivel pe linia CAN_H, sub nivelul CAN_L. Când jurnal. Nivelul 0 (bit dominant) pe linia CAN_H este mai scăzut, nivelul inferior CAN_L. Voi veni să vă rog despre tabăra shini: tabăra pasivă a shini este alcătuită din jurnalul rivnyu. 1, și activ - jurnal rivnyu. 0. Dacă se întâmplă să nu fie transmis prin autobuz, trebuie să vă aflați într-o stație pasivă. Transmiterea preferinței trebuie reparată de la bitul dominant. Logica magistralei robotice este condusă de „I-ul conductiv”: bitul dominant „0” este condus de bitul recesiv „1” (Fig. 12.1).
Mic. 12.1. Logica robotului CAN autobuz
Când realizați fizic un anumit proiect cu CAN, este necesar să vă raportați la autoritățile autobuzului și la universități: este posibil să eliminați unele dintre atașamentele suplimentare, cum ar fi autoritățile mirosului de apă, cum ar fi senzorii și mecanismele prezenței în sisteme, că În cea mai mare parte, mințile de exploatare pot vikoristovuvatisya o linie de sârmă (în mijlocul plății), linie cu două fire, răsucite o pereche de linie de fibră optică. Cu metoda diferențială, formarea semnalelor într-o linie cu două fire este permisă pentru a ajusta semnificativ performanța înainte de codurile de tranziție. În cazul presiunii diferențiale a încadrării CAN, voi continua să funcționez într-un mediu super-zgomotos, de exemplu, dacă este tăiată doar o singură linie de semnal. Înfășurarea la torsiune la ralanti perechi de intrări diferențiale POATE neutraliza efectiv zgomotul.
Viteza maximă de transmisie este de 1 Mb / s cu o anvelopă suplimentară de 40 m și aproape de 40 Kb / s cu o anvelopă suplimentară de 1000 m.
p_zvidi CAN
Într-o oră dată, atașamentele disponibile cu o interfață CAN, formate independent de transmiterea datelor de la un punct la altul, permit realizarea sincronizării proceselor și deservirea în funcție de priorități. Implementări mai timpurii ale controlerelor CAN pot fi utilizate pentru a identifica cadre cu identificatori de 11 biți și pot fi adresate până în 2048, în funcție de specificația CAN V. 2.0A. Astfel de controlere se numesc CAN de bază și se caracterizează printr-o interblocare puternică a unității centrale de procesare (CPU), precum și a aspectului care pare a fi memorat în memorie, iar CPU este trimis în memorie și CPU are nevoie de el (Fig. 12.2). Controlerele CAN de bază înlocuiesc un buffer de transmisie sau unul sau două buffere de recepție la întâmplare. Trebuie să trimiteți sau să anulați ocazia, trebuie să utilizați CPU prin reapelarea „message_sent” și „message_received”. Ca urmare a recablării ocaziei de introducere a skin-ului, blocarea procesorului este și mai mare, așa că va împleti rapiditatea reală a schimbului pe măsură ce crește. Există o serie de motive pentru care astfel de controlere sunt vicioase în cadrul CAN cu o viteză redusă de schimb și / sau chiar o mică cantitate de ocazie.
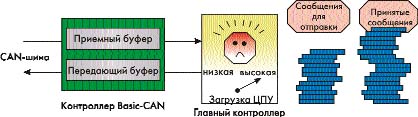
Mic. 12.2. Structura de bază a controlerului CAN
Există un număr mare de controlere CAN actuale disponibile pentru extinderea cadrelor, fiecare cu un identificator, de până la 29 de raze, ceea ce permite adresarea până la 536 de milioane ocazional. Aceste controlere adaptează specificul CAN V. 2.0B (activ) și se numesc controlere Full-CAN. Au transferat ocazional un tampon pentru declineri, în plus, pielea are nevoie de propria mască, iar filtrul apare în funcție de aspectul identificatorului masei.
Odată ce CPU-ul Full-CAN este maxim nelegat, nu există fragmente din spațiul neutilizat (Fig. 12.3). Când respingeți identitatea identificatorului, care pare a fi o masă, acesta va fi memorat într-o zonă specială a RAM-ului dual-port, iar robotul procesorului va fi întrerupt. Full-CAN poate fi, de asemenea, un tip special de informații, ceea ce înseamnă: „cine nu ar fi ratat informația, să fie nevăstuică, trimite-o imediat”. Controlerul Full-CAN va asculta automat toate actualizările și va alimenta informațiile.

Mic. 12.3. Structura controlerului full-CAN
Până de curând, în industrie, exista o gamă largă de extensii CAN de bază cu identificatori de 11 biți. Întregul protocol permite apeluri simple între microcontrolere și atașamente periferice atunci când viteza este de până la 250 Kbit / s. Cu toate acestea, odată cu costul redus al controlerelor CAN, victorianul Full-CAN a devenit o opțiune viabilă pentru conectarea la anexele principale. În timp ce în suplimentele industriale, este necesar un schimb de date de mare viteză (până la 1 Mb / s), nu este neobișnuit pentru Full-CAN.
Arbitrajul universităților CAN-bus
CAN are o mulțime de puteri unice pentru a se adapta la fiecare dintre aceste anvelope. Pentru protocolul CAN, este posibil să lucrați pe CAN-busul local, la aceeași adresă a inițiatorului și a destinatarului ocaziei. Vuzolul din piele „aruncă o privire peste” anvelopă după un timp și filtrarea locală este bună atunci când o scoateți din drum, când scoateți măștile de biți și când scăpați de anvelope.
Drept urmare, universitatea a acceptat și a prelucrat doar cât mai curând posibil, așa cum era menită pentru noua.
Pielea are propria prioritate, ceea ce înseamnă că este necesar să se răzbune în identitatea ocaziei. În plus, identificarea secundară pentru tipul de ocazie desemnat. După numele celui mai tânăr număr din identificatorul priorității; Cea mai bună prioritate este utilizarea identificatorului, astfel încât să crească de la zero. Transmiterea mesajului instant este reparată de la actualizare la magistrala de identificare. De îndată ce accesul la autobuz este posibil, acesta va fi transferat de la cea mai mare prioritate, la cele mai mici valori ale identificatorului, doar de la cele legate de linia de producție a anvelopei. Kozhen vuzol persh nіzh nіzh nadsilatiy povіdomlennya perevіryaє, chi pratsyuv vuzol cu mare prioritate. Dacă este așa, atunci trebuie să mă îndrept spre tabăra gazdei și să încep să trimit mesajul în ultima oră. Prețul energiei este deosebit de semnificativ atunci când se află în sistemele de control ale orei reale, ceea ce este mai important decât prioritatea.
Dacă transferul universității A este trimis către universitatea B, datorită faptului că, datorită faptului că are o prioritate mai mare, atunci, pe măsură ce autobuzul va suna, dacă transmisiile coliziunii CSMA sunt numite Acces / CA. acces out-of-the-box la experiență / confruntare). Un astfel de mod din vizualizarea de pe Ethernet nu permite părților aflate în conflictul universităților din autobuzul din autobuz, dar imediat va fi posibil și rapid schimbul.
Otzhe, conducătorii arbitrajului anvelopei, în funcție de prioritate, vor fi transferați la primul, fără a păstra funcționalitatea sistemului și într-o scară în timp real și transmiterea informațiilor. Distribuirea priorităților între diferite tipuri de copii ar trebui să fie rugată să devină dezvoltator în cazul unui proiect.
format aleatoriu
Atâta timp cât nu este necesar să se repete procedura de repetare a informațiilor luate cu milă, există două tipuri de comunicare între universități: o universitate va transfera informații și una va respinge sau universitatea A va furniza universitatea B despre cele date și vor accepta informațiile.
Mic. 12.4. Cadru de date
Pentru transmiterea tributelor, serviți un cadru de tribute - Cadru de date(Fig. 12.4), cum să te răzbuni:
- Un identificator care depinde de tipul de comunicare ("motor_speed", "oil_temperature") și de prioritatea de acces la magistrală. Câmpul de identificare ar trebui să fie diferit de numărul de biți din depozit conform protocolului: în formatul standard CAN V2.0A de transferuri este un identificator de 11 biți, iar în CAN extins V2.0B - 29 de biți;
- câmp de date, cum să te răzbuni ocazional ("motor_speed" = 6000 rpm, "oil_temperature" = 110 ° C) până la opt octeți;
- doi octeți de control sumi - Verificarea redundanței ciclice (CRC) pentru identificarea și corectarea subvențiilor de transfer.
Pentru a alimenta cadrul universitar CAN vikorist, alimentați cadrul de la distanță (Fig. 12.5), care este pentru a se răzbuna:
- Identificatorul, care este tipul de informații, cum să fie alimentat („motor_viteză”, „ulei de temperatură”) și prioritatea ocaziei;
- doi octeți de control sumi CRC.
Mic. 12.5. Frame zapu danih Frame la distanță
La sfârșitul zilei, identificatorul nu poate fi urmărit înapoi la date, iar codul datelor date nu poate fi indicat direct la numărul de octeți dat. Instituția de învățământ superior, care este solicitată să transmită informații (senzor de temperatură a uleiului), transmite un cadru de date pentru a răzbuna informațiile necesare. Astfel, dacă universitatea A trimite către universitate Y cadrul este alimentat cu identificatorul "temperatura_ulei", atunci universitatea Senzorul de temperatură este trimis la universitatea A este dat cadrul, pentru dezvăluirea identificatorului "temperatura_ulei" și informațiile necesare .
Informații Dodatkova, cum să participați la cadru, permițând formatul corect și sincronizarea protocolului de transmisie, în funcție de tipul de setare:
- Ori de câte ori există o cerere - o sursă de alimentare pentru date sau pentru o sursă de alimentare, bitul de pornire a datelor de la o sursă de alimentare de transmisie dată (RTR pentru un identificator de 11 biți și SRR pentru un identificator de 29 de biți);
- codul datei date, care va apărea, octeții dați pentru a răzbuna informațiile; toate universitățile iau un cadru al tributului, chiar și de la ele, deoarece informațiile nu sunt necesare, nu le îngrijesc;
- pentru securizarea sincronizării și controlul cadrului, atribuiți câmpurile cadrului Începutul cadrului, încheierea cadrului Sfârșitul cadrului și confirmați câmpul de confirmare;
- intrați în modul de sincronizare pe autobuz, parcurgeți primul bit din câmpul Start of Frame, sincronizarea directă este primită de față când timpul se schimbă, bitul este aplicat;
- vikoristovuєtsya mechanizm bitstaffing - inserarea unui bit suplimentar la apariția a cinci zerouri sau odiniți.
descoperirea grațierilor
Semnalizarea despre grațiere este arătată prin modul de transmitere la cadrul de grațiere Grație Frame. Vin іnіtsіyuєtsya să fie un fel de universitate, cum ar fi dezvăluit o iertare. Controlorii CAN testează metoda de procesare statistică a subvențiilor. Kozhen vuzol pentru a răzbuna grațierile atunci când transmiteți și primiți Contor de erori de transmisie și primiți contor de erori. Ori de câte ori este primit un transfer sau dacă este acceptat, va fi o iertare, ceea ce înseamnă că o anumită persoană va fi salvată. Dacă sensul căutătorului este perevischuyu meza, transmisia fluxului este perepirivayutsya. Instituția de învățământ superior a văzut un semnal despre grațiere în cadrul cadrului de erori vyglyadі, de-vistavlya ofițerul dominant activ al grațierii până la vârsta de 6 octeți. În timp ce jucam universitatea, transmisia unui astfel de glonț a fost întreruptă, repetându-se de fiecare dată. Nenadіinim abo chastkovo pozkodzhenim vuzlіv are voie să pună mâna pe privarea steagului pasiv recesiv al grațierii.
CAN are câteva tipuri de subvenții. Există trei tipuri de ele în mod regulat:
- Eroare CRC - verificați scuzarea sumelor (dacă există o diferență în câmpul CRC și sumele de verificare sunt calculate).
- Eroare formular - iertarea formatului cadrului dacă formatul acceptat nu se potrivește cu formatul CAN.
- Eroare de confirmare - promisiunea de confirmare a admiterii unei vizite, dacă o universitate nu a confirmat refuzul corect al unei vizite.
În plus, există două tipuri de grațiere la nivelul biților:
- Bit Error - vom trimite o universitate activă la autobuz aceleași valori reale pentru realizarea mecanismului de autocontrol de către universitate.
- Stuff Error - apariția în câmp a apariției a șase atacatori bit 0 sau 1 (pomilka bitstaffing).
Crescătorii cimecanismelor de recunoaștere și corectare a grațierilor Rata de trecere a grațierilor este foarte mică. De exemplu, cu o viteză de 500 Kb / s, o oprire a anvelopelor de 25% și o licență pentru o perioadă de 2000 de ani pentru prețul unui vin, există o singură iertare nerealizată pentru 1000 de rachete. În plus, la anvelope, situația blocării tuturor roboților de către o universitate incomparabilă este incomodă. Astfel de universități apar și sunt conectate la schimb prin autobuz.



