Protokol CAN je norma ISO (ISO 11898) pro oblast posledního přenosu. Protokol byl šířen s ohledem na victoriannya při přepravě dodatkas. Současný CAN se rozšířil do široké škály aplikací a lze jej použít v průmyslových automatizačních systémech i v dopravě.
Standard CAN je uložen z fyzické úrovně a úrovně přenosu peněz, což je způsobeno množstvím různých typů problémů, pravidly pro řešení konfliktů při přístupu na sběrnici a předcházení problémům.
protokol CAN
Protokol CAN popisů v normě ISO 11898-1 lze stručně charakterizovat následujícím pořadím:
Fyzikální rivn vikoristyє diferenciální přenos dat o kroucených párech;
Pro keruvannya přístup k autobusu vikoristovuyutsya non-vyhlazování bit-moudrý konflikty;
Někdy může existovat malé množství peněz (je tam 8 bajtů peněz) a odcizeno o kontrolní částku;
V některých případech v den, explicitní adresy, pravděpodobnost, že kůže bude moci pomstít číselnou hodnotu, jako by to bylo na pneumatice, a to může být také identifikátor ve stejnou dobu;
Schéma zpracování milostí je promyšleno, takže se postarám o to, abych předání kořisti opakoval, bude-li smrad odnášena patřičná hodnost;
є Účinně pro izolaci nemocí a vizualizaci zdravých univerzit z autobusu.
Protokoly vishnyh rіvnіv
Samotný protokol CAN je méně důležitý, protože malé pakety dat lze nekonečně přesouvat z bodu A do bodu B za další komunální střed. Win, yak a slide ochіkuvati, o těch jako proud keruvati není co říci; přenášet velké množství poct, nekonat se v 8-bajtech informací; nі o adresách univerzit; založení z'єdnannya tosho. Tento bod je založen na protokolu Higher Layer Protocol (HLP). Termín HLP je podobný modelu OSI a sedmi pivotů.
Protokoly potravinářského ryvnya se používají pro:
Standardizace postupu startu, včetně přenosu vibrací;
Rozpodil adresu středu propojených univerzit nebo typů časů;
Viznachennya razmіtki povіdomlen;
zabezpechennya pořadí zpracování milostí zbavených systémů rіvnі.
Skupina Koristuvalnitski je příliš malá.
Jedním z nejúčinnějších způsobů, jak zvýšit svou kompetenci v oblasti CAN, je zapojit se do robota, pracovat v rámci existujících skupin lidí. Pokud neplánujete své bratry, budu se aktivně podílet na robotech, koristuvatské skupiny mohou být dobrým informačním džerelem. Zaveďte konference ještě laskavějším způsobem odmítnutí nejpřesnějších a nejpřesnějších informací.
Produkty CAN
Na nízké úrovni jsou na trhu dostupné dva typy produktů CAN – mikroobvody CAN a nástroje CAN. Na trhu s potravinami existují dva hlavní produkty: moduly CAN a nástroje pro návrh CAN. Široká škála produktů Danih je na trhu dostupná během dané hodiny.
Patenty v galuzi CAN
Patenty, které lze nalézt před rozšířeními CAN, mohou být různých typů: realizace synchronizace frekvencí, přenos velkých sad poct (protokol CAN má 8 bajtů rámců daných před géniem) atd.
Systémy keruvannya na bázi růže
Protokol CAN je základem pro vývoj řídicích systémů. Způsob řešení konfliktů, které mohou být s CAN vítězné, se postará o to, že skin univerzita CAN bude propojena s výskyty a bude nahlášena dané univerzitě.
Systém distribuovaného řízení lze popsat jako systém, jehož námaha je rozdělena mezi univerzity systému. Protylezhniy Variant - systém s centrálním procesorem a místními vstupními vivedennými body.
Ovidomlennya CAN
Sběrnice CAN se používá pro velkoplošné sběrnice. Tse znamená, že všechny univerzity slyší všechny přenosy. Není mnoho možností zeptat se na konkrétní univerzitu; Vlastnictví CAN však poskytuje možnost lokální filtrace, takže skin modul může reagovat pouze na příležitost, kterou je nutné změnit.
CAN adresování
CAN vikoristovuє na relativně krátkou dobu - maximální množství informačního pole se stává 94 bitů. Každý den existují explicitní adresy, lze je nazvat obsahově adresné: místo toho, aby se implicitně (implicitně) objevovala identita návštěvníka.
Tipi občas
Existují 4 typy zpráv (nebo rámců), které jsou přenášeny přes CAN sběrnici:
Danih frame (Data Frame);
Rám (vzdálený rám);
rámec vděčnosti (Error Frame);
Přetížení rámu.
Danikhův rám
Stručně: "Jsme vděční, є pocta obchodníkům X, je mi ctí!"
Rám Danih je nejběžnějším typem příležitosti. Vyhrajte, abyste se pomstili na těchto základních částech (detaily nejsou vidět kvůli síle):
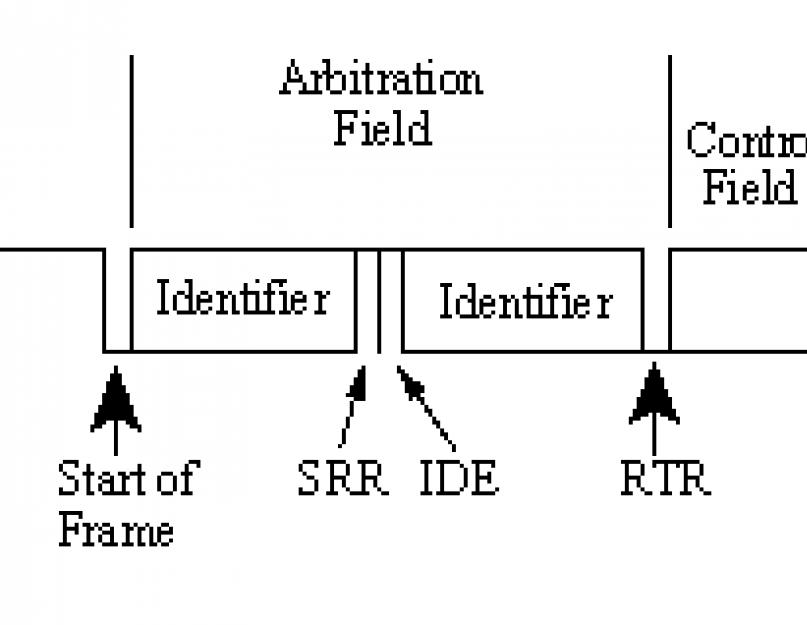
Arbitrážní pole, jak má být, pokud o pneumatiku bojují dvě nebo více univerzit. Arbitrážní pole k pomstě:
Typ je CAN 2.0A, 11bitový identifikátor a jeden bit, bit RTR, který je iniciálem pro rámce.
Má typ CAN 2.0B, 29bitový identifikátor (který lze také použít k nahrazení dvou přijatelných bitů: SRR a IDE) a bit RTR.
Datové pole, které lze nastavit od 0 do 8 bajtů dat.
Pole CRC (CRC Field) pro odhalení 15bitového kontrolního součtu je pokryto většinou částí účtu. Qia je kontrolní součet vikaristů, kteří mají přijímat milosti.
Slot pro potvrzení. Ovladač skinu CAN, který to mohl kdykoliv správně opravit, se postaral o to, aby byl pro kožní problémy použit potvrzovací bit. Přijetí přehodnocení vzhledu trochu uznání, protože se to nezdá, je přemoženo znovu se objevit.
Poznámka 1: Přítomnost udidla na pneumatice nic neznamená, kromě toho, že plány kůže adresáta jsou odstraněny z cesty. Samo o sobě je zřejmé, že jde o fakt správného odmítnutí odpovědnosti kvůli jednomu nebo více decilkom uzlům sběrnice.
Poznámka 2: Identifikátor pro obor rozhodčího řízení, bez ohledu na název, není nutné jej vždy identifikovat.
Datový rámec CAN 2.0B (standardní CAN).
Rám dostal CAN 2.0B ("rozšíření CAN").
Rám
Stručně: "Jsme vděční, jak můžete vytvořit dania z Markuvans X?"
Kromě toho je rám ještě více podobný tribute frame, ale se dvěma důležitými upozorněními:
Je jasné, že významy rámce jsou vykresleny (bit RTR v oblasti arbitráže є recesivní) a
Každodenní hold pole.
Hlavní hůl daného rámu je živena holdem správnému rámu. Pokud řekněme univerzita A překonala rámec s parametrem pole arbitrage rovným 234, pak univerzita B, která je správným stupněm inovace, je vinna přehlédnutím rámce daného parametrem pole 234.
Rám je možné ztvárnit pro realizaci přepravy autobusového provozu typu "napájený". Ve skutečnosti protestujte, nestačí přidat panáka. Není to tak důležité, protože standard CAN netrestá děti, jak je zde míněno. Většinu CAN ovladačů lze naprogramovat tak, že se smrad automaticky vrátí do rámu, nebo vymění lokální procesor.
Є Jeden trik, svázaný rámcem: Kód délky dat je na vině za rozhodnutí, která jsme viděli naposledy. Řešení konfliktu není úspěšné.
V některých případech je nutné, aby univerzita poslala záběr do snímku, který opraví jeho přenos jako pouze rozpoznáním identifikátoru a podle této hodnosti bude prázdný snímek obnoven. Tse іnshy vipadok.
Chyba rámu
Krátce (všichni najednou, hlasem): "Ó, DRAHÁ, POJĎME ROSE ROSE"
Rámec pardonu (Error Frame) je speciální příležitost, pokud poruším pravidla pro tvorbu rámců v případě CAN. Pokusím se to udělat, pokud univerzita dokázala pomoci a pomoci jiným univerzitám, pokud to zavání tím, že přemáhá mnoho omilostnění. Přenos se automaticky pokusí znovu odeslat spojení. Mám dobře promyšlené schéma sbírání grantů, které je garantem toho, že univerzita nemůže přerušit předávání darů tím, jak se grantové rámce opakují.
Rámec prominutí by měl být nahrazen předchůdcem prominutí (Error Flag), který je uložen v 6 bitech stejné hodnoty (tímto způsobem je porušeno pravidlo pro vkládání bitů) a interval mezi prominutím (Error Delimiter), asi 8 recesivních bitů. Rozpushuvach pomilki nadaє deyaky prostor, ve kterém іnshі vuzli shini mohou upravit svou pompor pompéznost, aby se objevila první pompor pompor.
Přetížení rámu
Stručně: Jsem o něco méně než 82 526, nemohli bychom si vybrat trochu chleba?
Rám je nyní skryt odtud, kromě obrazu. Vzhledem k formátu vin jde o podobný rámeček milosti, který se přenáší na okupovanou univerzitu. Rám není často přibitý, protože Suchasn_ CAN regulátory k dosažení produktivity, nebuďte vítězové. Ve skutečnosti je jediným ovladačem, který generuje novou úlohu, starý 82526.
Standardní rozšíření CAN
Sbírka standardu CAN nastavením dalšího identifikátoru v oblasti rozhodčího řízení, který bude stát 11 bitů. V důsledku toho byl standard ve prospěch kupujících rozšířen. Nový formát se často nazývá rozšířený CAN (Extended CAN); Pro rozdělení dvou typů personálu je nutné provést rezervaci v kontrolním poli Kontrolního pole.
Formálně se standard nazývá takto -
2.0A - zbaven 11bitových identifikátorů;
2.0B - rozšířená verze s 29bitovými nebo 11bitovými identifikátory (lze změnit). Lze použít Vuzol 2.0B
2,0B aktivní, tobto. Přeneseme to dál a pryč z rozšířených rámů,
2.0B pasivní (pasivní), tobto. vyhrajte letáky skidatime otrimanі rozšířené kadri (ale, div se dole).
1.x - nutno dodržet organizační specifika a revize.
V aktuální hodině jsou nové ovladače CAN nastaveny na typ 2.0B. Zaregistruje se inspektor typu 1.x nebo 2.0A, který ořízne arbitráž o 29 bitů. Controller 2.0B je pasivní vůči typu přijetí їх, ізна, pokud je vůně vіrnі a kvůli kůži; je aktivní ovladač 2.0B a lze jej čas od času přenést a odebrat.
Ovladače 2.0B a 2.0A (yak a 1.x) celkem. Můžete si vybrat jízdu na stejné pneumatice, ovladače 2.0B lze instalovat pomocí prodloužených rámů.
Někteří lidé tvrdí, že standardní CAN je „lepší“ než rozšířený CAN a v některých rozšířených CAN je více služeb. Není tomu tak nutně. Pokud se podíváte na pole arbitráže přenosu dat, pak může být rozšířený rámec CAN menší než servisní data, pod standardní rámec CAN.
Základní CAN (Basic CAN) Sekundární CAN (Full CAN)
Pojmy Basic CAN a Full CAN přebírají klas z rodiny CAN. Klikněte na řadič Intel 82526 CAN a poté dejte programátorovi rozhraní ve stylu DPRAM. Poté Philips přišel k modelu 82C200, ve kterém byl použit model programu na bázi FIFO a propojení možností filtrace. Pro vývoj dvou různých softwarových modelů si lidé mysleli, že nazývají metodu Intel - Full CAN a metodu Philips - Basic CAN. Současný velký počet CAN kontrolérů akceptuje problematické modely programů, totéž není případ podmínek Full CAN a Basic CAN – ve skutečnosti mohou být tyto podmínky pro nepoctivé a z jakéhokoli důvodu škodlivé.
Ovladač Full CAN lze ve skutečnosti propojit s ovladačem Basic CAN a Navpacky. Problémy ze summitu dne.
Poslední týden konfliktů o pneumatikách a prioritě nových
Případné konflikty (proces, v jehož důsledku existují dva nebo více CAN řadičů, pokud používáte sběrnici) jsou ještě důležitější pro to, aby byla reálná dostupnost přenosového smogu pro přenos dat ještě důležitější.
Ať už se jedná o řadič CAN, můžete zahájit přenos, pokud je sběrnice nečinná. Je možné zajistit, aby dva nebo více ovladačů obdrželo vysílání nové (mayzhe) jedné hodiny. Konflikt se objevuje takovým způsobem. Vysílající univerzity monitorují pneumatiku v procesu dohledu nad touto příležitostí. Jakmile je vysoká škola v tu hodinu dominantní, protože kontroluje recesivní úroveň, je nepřesné ztrácet ze zřetele proces řešení konfliktu a přijetí. Ke konfliktu dojde v celém poli provozu, a pokud je pole viditelné, na pneumatice zůstane pouze jeden převod. Tsey vuzol pokračovat v přenosu, protože nic nebude. Nejpotenciálnější přenosy se pokusí přenést svá vlastní data na novou úroveň, pokud pneumatika zvoní. Proces řešení konfliktu neztrácí ani hodinu.
Důležitým smýšlením pro úspěšné vyřešení konfliktu je neutěšená situace, kdy dvě vysoké školy mohou převést stejný obor do arbitráže. Tři pravidla є jedna vinyatka: jakmile se nepomstíte za hold, ať už je to univerzita, může přenést čas.
Oscilace CAN-bus є sběrnice s připojenými přílohami na drátovém-AND a dominantním bitem є logická 0, i když někdy je nejnižší v poli numerické proměnné na displeji.
Pitannya: Co se stane z vipadku, jak se může pokusit o návštěvu jedna ze škol lesku?
Návrh: Vuzol, zoosulo, hrál v případě konfliktu a úspěšně dokončil přenos příležitosti. Pokud je čas to dostat ven ... univerzita nemění dominantní část uznání regionu, takže přenosy by měly být omluveny, pokud potřebujete omluvu, aby se hodnota vašeho peer přesunula do opětovného přenosu do 8. Tento cyklus se bude opakovat 16krát, poté přejdou přenosy do stavu pasivního omilostnění. S výhradou zvláštního pravidla v algoritmu pro udělování milostí již není k dispozici hodnota omilostněného, protože univerzita má status pasivní milosti a udělení milosti є schválení milosti. Na to ho bude moci univerzita převést navždy, až potichu, dokud nebude zveřejněn.
Adresa a identifikace místa
Opět není nic hrozného na tom, že v CAN někdy nejsou přesné adresy. Ovladač skinu CAN ořízne veškerý provoz sběrnice a pro další kombinaci filtrů zařízení a PZ, visnatime - "tsikavit" příště, chi ni.
Ve skutečnosti protokol CAN nerozumí adrese a vzhledu. Přírodu v místě návštěvy odstartuje identifikátor, který je umístěn zde na místě. Někdy lze CAN nazvat "content-addressed".
Zpěv adresy je následující: Tse povidlennya pro univerzitu X. Adresování obsahu lze popsat takto: "Tse povidomlennya pomsta data od obchodníků X". Riznitsya mіzh tsimi ve dvou konceptech je malý, ale suttєva.
Na místě rozhodčího pole je podle normy vítězné pro účely stanovení výkonu na pneumatice. Všechny CAN kontroléry budou také zodpovědné za všechny (akce - pouze část) pole arbitráže je klíčem k procesu hardwarového filtrování.
Standardem není ani to, že obor rozhodčího řízení není jednotně zobrazen jako identifikátor pro danou příležitost. Chraňte možnosti rozšíření pro vicoristannya.
Poznámka k hodnotě identifikátoru
Řekli jsme, že dostupný identifikátor je 11 (CAN 2.0A) nebo 29 (CAN 2.0B) bitů. Cena není správná. Pro hloupost starých lidí, CAN řadič (hádejte co?), Identifikace nevinné matky 7 seniorských bitů nainstalovaných v logické jednotce, že 11bitové identifikátory mají přístup k hodnotě 0..2031, a počet identifikátorů v 29bitových 6bitových.
Respektujte, že řešení CAN řadičů akceptuje „špatné“ identifikátory, takže v současných identifikačních systémech CAN 2032..2047 se toho můžete zbavit.
Fyzikální parametry CAN
CAN sběrnice
Viktoristický kód sběrnice CAN bez vynulování (NRZ) s vkládáním bitů. Signál má dva odlišné signály: dominantní (logická 0) a recesivní (logická 1). Zápach svědčí o zpěvu elektrických roklí, o tom, jak si lehnout jako fyzická rokle (їkh kіlka). Moduly jsou připojeny ke sběrnici podle schématu wired-AND: pokud chce jedna univerzita přemístit autobus do dominantního tábora, pak se celý autobus ve skutečnosti nachází ve stejné stanici, protože univerzity převádějí recesistický mlýn .
Різні fyzické рівні
Fyzická rv Návrh schématu přenosu elektrického signálu na sběrnici, pouze vnější podpora kabelu.
Іsnuє kіlka rіznih versіy fіzichnih rіvnіv: Naybіlsh poshirenim Je varianta, viznacheny CAN standard Chastina ISO 11898-2, i Je dvoprovіdnoyu zbalansovanoyu signalizační schéma Říká se mu také vysokorychlostní CAN.
Další část normy ISO 11898-3 popisuje dvouvodičový symetrický signalizační obvod pro malou sběrnici. Je tu spousta potíží, takže přenos signálů se může nadále měnit, pokud dojde k přeřazení jednoho z drátů, zkratu na "země" nebo ve stanici Vbat. Tento obvod se nazývá nízkorychlostní CAN.
SAE J2411 je jednovodičový (samozřejmě plus „zem“) fyzický stav. Vyhrajte vikoristovuєtsya hlavně v autech, například GM-LAN.
Ісnу kіlka proprietární tělesné výchovy.
Hodiny plynuly, pokud nezmizely ovladače CAN, byly přidány úpravy RS485.
Klamné fyzické ekvivalenty, nemůžete komunikovat sami se sebou. Deyakі kombіnatsії mozhut pratsyuvati (pro dobrotu) dobré mysli... Například akceptování vysoké a nízké rychlosti lze provést pouze na jedné pneumatice.
Absolutní většina přijímačů CAN je k dispozici od společnosti Philips; až po největší virobniky patří Bosch, Infineon, Siliconix a Unitrode.
Nejrozšířenější akceptace je 82C250, ve které jsou realizace fyzické, popisuje ji norma ISO 11898. Verze je 82C251.
Rozšíření akceptace pro „nízkorychlostní CAN“ – Philips TJA1054.
maximální rychlost přenos dat o pneumatikách
Maximální rychlost přenosu dat přes CAN sběrnici, podle standardu, silnice 1 Mb/s. Některé řadiče CAN však mohou přijímat rychlost 1 Mb/s a lze je použít ve speciálních doplňcích.
Nízkorychlostní CAN (ISO 11898-3, div. Vishche) je efektivní při rychlostech až 125 kbit/s.
Jednodrátová CAN sběrnice ve standardním režimu dokáže přenášet data od rychlosti blízké 50 kbit/s a ve speciálním vysokorychlostním režimu, například pro program ECU, se blíží 100 kbit/s.
Minimální rychlost přenosu dat o pneumatikách
Budiž vám na mysli, že nedovolíte vibrovat frekvenci nižší hodnoty zpěvu. Pokud například zvolíte 82C250 nebo 82C251, můžete snadno nastavit rychlost na 10 kb/s, ale pokud používáte TJA1050, nemůžete nastavit rychlost na méně než 50 kb/s. Buďte si vědomi specifik.
Maximální množství kabelu
Při rychlosti přenosu 1 Mb/s se maximální zisk kabelu, který se může stát zlým, může přiblížit až 40 metrům. Cena je vázána na viditelné schéma přenosu konfliktů, ale kvůli přední části signálu je matka zodpovědná za možnost jít na nalezenou univerzitu a vrátit se zpět. Jinými slovy, kabel je obklopen nízkou hmotností. Byly prozkoumány návrhy, jak zlepšit kvalitu světla, trochu více bylo vidět přes mezigalaktické problémy.
Maximální délka kabelu Іnshі (přibližná hodnota):
100 metrů pro 500 kbit/s;
200 metrů pro 250 kbit/s;
500 metrů pro 125 kbit/s;
6 kilometrů za 10 kbit/s.
Pokud se k zajištění galvanického oddělení použije optočlen, pak se maximální rychlost pneumatiky pravděpodobně zrychlí. Jsem rád: zvedněte nejrychlejší optočleny a nechte se ohromit příjmem signálu v příloze, a ne maximální rychlostí přenosu dat při specifičnosti.
Kintseve výměna shini
Sběrnice CAN podle normy ISO 11898 může končit terminátorem. Tse dosáhne pomocí instalace rezistoru s podporou 120 Ohm na konec skinu. Termynuvannya slouží dvěma účelům:
1. Získejte zobrazený signál na konci řádku.
2. Překřížením odstraňte správný post-strum (DC).
Sběrnice CAN podle normy ISO 11898 je nuceně ukončena nezávisle na її її їvydkosti. Budu se opakovat: CAN sběrnice na normu ISO 11898 je nutně vázána hned z novinek. Pro laboratorní roboty Můžete nahradit jeden terminátor. Jakmile je vaše sběrnice CAN schopna navigovat mimo terminátory, jste prostě šťastní.
Respekt, scho інші fyzické рівні, jako je nízkorychlostní CAN, lze použít jednodrátovou sběrnici CAN, ale nelze ji považovat za zakončení sběrnice terminálu. Pokud vaše vysokorychlostní sběrnice CAN podle normy ISO 11898 závisí na dostupnosti jednoho terminátoru.
Kabel
Norma ISO 11898 trestá, že kabel je nominálně vinen 120 Ohm, intervalová hodnota podpory Ohm je povolena.
Na trhu je málo lidí, kabely jsou s cim vimogamem spokojené. Má velkou hodnotu, ale intervalová hodnota podpory bude v budoucnu rozšířena.
ISO 11898 popisuje kroucenou dvojlinku, stíněnou nebo nestíněnou. Trivia robot přes jednodrátový standard SAE J2411.
Pneumatika sběrnice CAN Míč byl spuštěn v 80. letech společností Robert Bosch GmbH (Nimechchina) jako řešení pro distribuční systémy, které pracují v režimu reálné hodiny. Vidminnoy specialita pneumatiky є її je viskózní. Dodatkovoyu perevagoyu shini CAN Je її stіykіst to mehanіchnih poshkodzhen - zamikannya provіdnikіv shini na zagalny provіd, zhivlennya abo mіzh ho nejen prodat do nejvyšší melodie vivhod. Úpravy pneumatiky jsou navíc stavěny tak, aby dobře fungovaly hodinu, jednoho z vodítek oholím.
CAN-bus v promislovye šití
Polská sběrnice CAN (Controller Area Network) se vyznačuje vysokou rychlostí přenosu dat a efektivitou a také zdáním, zda jde o dobrou věc či co. Konopný průmysl je široce provozován v takových oblastech, jako je automobilový průmysl. soukromá doprava, průmyslová automatizace, avіatsіya, systémy a řízení přístupu. Podle sdružení CiA (CAN in Automation, www.can-cia.de) je dnes v provozu téměř 300 milionů univerzit CAN. Nimechchina má CAN-bus, který si půjčuje první místo pro popularitu středních polských pneumatik.
Charakteristika CAN protokolu CAN Reversals
Hlavním trendem v oblasti automatizace oboru při náhradě tradičního centralizovaného řídicího systému pro distribuci ovládání vrat je distribuce intelektuálních senzorů a mechanismů procesů uvádění do provozu. Cena vítězství za růst počtu uskutečněných hovorů, za nárůst počtu problémů, skládání diagnózy omilostnění a problémů s problémem. Spojení mezi univerzitami takového systému a pomoci vám za pomoci polského autobusu. CAN je spojovací systém pro různé řídicí systémy. Zprávy o přenosu CAN a důvody pro rozšíření otoku CAN jsou jasně viditelné.
Viprobační standard. Protokol CAN je aktivně využíván již více než 20 let, ale ještě důležitější je pro takové konzervativní oblasti, jako je soukromá doprava nebo stavba lodí. Porucha sběrnice CAN 1980 р. Robert Bosch pro automobilový průmysl. Rozhraní CAN pro předpisy s mezinárodními normami ISO 11898 pro vysokorychlostní a ISO 11519-1 pro nízkorychlostní doplňky. Nízká dostupnost CAN-řadičů na trhu má dobrý poměr kvalita / produktivita. Potřeba viditelnosti je dána lineární strukturou sběrnice a rovnocennou paritou univerzit, tzv. multi-master bus (Multi Master Bus), s CAN koženou univerzitou máte přístup ke sběrnici. Pokud se tak stane, může být zaslán jedné nebo druhé univerzitě. Všechny univerzity najednou čtou stejné informace ze sběrnice a informace se od nich odesílají a informace se od nich přijímají. Hodinový příjem je pro synchronizaci v řídicích systémech ještě důležitější. Univerzity, které byly zavedeny, jsou s ústřednou spojeny autobusem.
Existuje vysoký stupeň tolerance k tlumení infázových přechodů.
Není jednoduché sáhnout po jednoduchém napojení na sběrnici a napojení na sběrnici CAN-univerzit, navíc počet univerzit není omezen protokolem nižší úrovně. Informace o adrese lze nalézt u příležitosti a mají prioritu, pro kterou bude arbitráž fungovat. Proces robotů může změnit prioritu v závislosti na situaci. Znamená to také možnost naprogramování frekvence a fáze přenášeného signálu a arbitráže, stejně jako nenarušení struktury v případě konfliktů. Fyzicky є možnost výběru různých typů přenosových vedení: od levných kroucených sázek až po optické linky.
Robot v reálném čase je velmi mladý na začátku mechanismů nízkoúrovňové interakce (multimastery, široká škála, beat-up arbitrage) při vysoké rychlosti přenosů dat (až 1 Mb / s) a vysokou úroveň odezvy na obecný přenos.
UMĚT
CAN Ideální řešení pro jakékoli programy, mikrokontroléry, které lze vyměňovat jeden po druhém, a s dalšími periferními doplňky. Sbírka CAN vikoristovuvavsya v autech pro zajištění kritické na hodinu keruvannya a výměnu informací mezi motorem a převodovkou s garantovanou hodinou čištění a přijetí kůže účastníka v obilí do robota s přesnými údaji. Příkazem drahých vysoce kvalitních řešení je poskytnout ekonomické řešení pro připojení k vnitřní stěně, protože funguje v měřítku hodiny, stovky mikrosekund (keruvanny dveřní systém, otevřený S hodně namáhanými elektrickými dráty budou přerušeny dvouvodičovou mřížkou CAN, univerzitami, jako je є, včetně galvanizovaných pohonů a ukazatelů směru.
Široká dostupnost znalostí CAN v průmyslové automatizaci, existuje velké množství doplňků pro keruvannya, senzory, mechanismy, elektrické pohony atd.). Důležitým rysem takových systémů je schopnost diagnostikovat a spravovat objekty, které byly otřesy velkým územím, za adaptivními algoritmy. Výsledkem je, že sutta je dosažena pro změnu v životní námaze, hluku a pocitu vlastnictví. K dispozici je také obrázek, který lze vidět v externích palubních systémech, devirální roli výměny dat mezi systémy řidiče v souboru výkonu, pozinkovaných, keruvanných dveří a diagnostiky.
Fyzická rv
Fyzická úroveň sběrnice CAN je připojena k „instalaci I“ mezi přístavbami, které jsou k ní připojeny. Diferenční signální vedení se nazývají CAN_H a CAN_L a ve statické stanici se nacházejí s potenciálem 2,5 V. Log. 1 (recesivní bit) znamená linku sběrnice na jakékoli úrovni linky CAN_H, ale pod úrovní CAN_L. Podle protokolu. 0 (dominantní bit) úroveň řádku CAN_H nižší, nižší úroveň CAN_L. To bylo chváleno za takové potěšení z vlaku lesku: pasivní postoj shini byl proveden k paprsku rivnyu. 1, a aktivněji - rіvnem paprsek. 0. Pokud se náhodou nepřenese po sběrnici, budete přeřazeni na pasivní stanici. V průběhu času se nezapomeňte zotavit z dominantního rytmu. Logika sběrnicových robotů je zobrazena na "vodivé I": dominantní bit "0" přináší recesivní bit "1" (obr. 12.1).
Malý. 12.1. CAN sběrnice robotické logiky
Při fyzické realizaci konkrétního projektu s CAN je nutné dát do souvislosti výkon sběrnice a univerzity: je možné odstranit další přílohy, jako je výkon napájení, jako jsou senzory a mechanismy přítomnosti v systémech, Již z myšlenek exploatace je jednovodičové vedení (na hranici platby), dvouvodičové vedení, pár optických vedení je stočen. S diferenciální metodou je umožněno vytvoření signálů ve dvoudrátovém vedení změnit sílu na překódování. V případě krutých diferenciálních sil CAN-sítě budu i nadále fungovat ve skvěle pozinkovaném středu, například pokud existuje jedna nebo více signálních linek. Pro navigaci pomocí jednoduchých torzních párů diferenciálních vstupů CAN účinně neutralizovat hluk.
Maximální přenosová rychlost je 1 Mb/s s přídavnou pneumatikou 40 m a téměř 40 Kb/s s přídavnou pneumatikou 1000 m.
Rіznodydi CAN
V danou hodinu dostupné přílohy s rozhraním CAN, jako je přenos dat z jednoho bodu do centra, umožňují realizovat synchronizaci procesů a servis podle priorit. Ranější implementace CAN-řadičů ve formě rámců s 11bitovým identifikátorem a možností adresování až 2048 v závislosti na specifikaci CAN V. 2.0A. Takové řadiče se nazývají Basic CAN a vyznačují se silnou neoprávněnou manipulací s centrální procesorovou jednotkou (CPU), zdá se, že část vzhledu je zapamatována v paměti a CPU je odeslána do paměti a CPU to potřebuje (obr. 12.2). Základní CAN regulátory mají jednu vysílací vyrovnávací paměť a jednu nebo dvě přijímací vyrovnávací paměti co nejdříve. Pokud s tím potřebujete něco udělat, musíte převzít CPU pomocí změny "afterwards_sent" a "afterwards_trimano". V důsledku obrácení stavu kůže je blokování CPU ještě větší, takže to bude prolínat skutečnou rychlost změny jako u slepice. Existuje několik důvodů, proč jsou takové ovladače v rámci CAN s nízkou rychlostí výměny a/nebo dokonce s malým množstvím času.
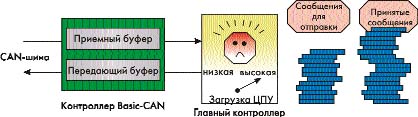
Malý. 12.2. Základní struktura řadiče CAN
Existuje velké množství CAN-řadičů, které jsou vydávány pro aktuální rok a počet rámců byl rozšířen o identifikátor až na 29 řádků, což umožňuje adresovat až 536 milionůkrát. Tyto regulátory se přizpůsobují specifikům CAN V. 2.0B (aktivní) a nazývají se Full-CAN regulátory. Zápach se občas přenesl do pufru a pleť vypadá, jako bych měl vlastní masku a filtr bude hledat identifikaci hmoty.
Jakmile je Full-CAN CPU maximálně odpojený, čipy se zbytečně nedrtí (obr. 12.3). Když obdržíte identifikaci s identifikátorem, co se jeví jako hromadné, bude si to zapamatováno ve speciální zóně dvouportového OZP a robot CPU bude přerušen. Full-CAN může být i speciálním typem informace, což znamená: „Kdo nemá mnoho informací, buď lasička, pošlete je najednou“. Ovladač Full-CAN bude automaticky poslouchat všechny informace, které jsou generovány a zapnuty.

Malý. 12.3. Struktura řadiče Full-CAN
Není tomu tak dávno, co v oboru Basic CAN extensions s 11bitovým identifikátorem. Celý protokol pro přijímání jednoduchých hovorů mezi mikrokontroléry a periferními přílohami s rychlostí výměny až 250 Kbit/s. Nicméně, s nízkými náklady na CAN-řadiče, Full-CAN victorian se stal životaschopnou možností pro připojení k hlavním přílohám. Protože průmyslové doplňky vyžadují vysokorychlostní (až 1 Mb/s) výměnu dat, není pro Full-CAN neobvyklé.
Rozhodčí řízení univerzit CAN-bus
CAN má mnoho jedinečných schopností přizpůsobit se každé z těchto pneumatik. V protokolu CAN je dohled nad cizí sběrnicí CAN, na stejné adrese původce i aktuální. Kožená vysokoškolská instituce „pohlédne“ na autobus a místní filtr recepce, vicoristovuchi bitové masky a vyrishu, jako občasné vytyaguvati z autobusu.
Univerzita ve výsledku přijme a zpracuje pouze ty nové, které jsou pro nového důležité.
Kůže má svou vlastní prioritu, to znamená, že je třeba se pomstít v identifikátoru současnosti. Kromě toho je nutné identifikovat typ návštěvníka, který má být identifikován. Podle názvu nejmladšího čísla identifikátoru, nejvyšší priorita; Nejdůležitější prioritou je přidělení identifikátoru, aby jej bylo možné uložit od nuly. Je nutné opravit aktualizaci na sběrnici identifikátorů. Jakmile bude možný přístup k pneumatice, bude co nejdříve poskytnut, což bude převedeno s nejvhodnější prioritou, takže pro nižší hodnoty identifikátoru právě z těch, které se týkají výrobní linky pneumatiky. Kozhen vuzol před převodem na euro, který vuzol má správnou prioritu. Je to tak, otočím se v táboře řidiče a připravím se na odeslání v příští hodině. Síla výkonu je zvláště důležitá pro řídicí systémy skutečné hodiny, což je zvláště důležité pro prioritu.
Jakmile se přesune univerzity A na univerzitu B, což zastíní sílu udělení vyšší priority, pak, když začne zvonit autobus, pokusím se jej převést z univerzity A. přístup ke službám / konfrontace ). Takový režim na pohledu z Ethernetu neumožňuje běh kolidujících univerzit v autobuse, ale zároveň jej bude možné rychle vyměnit.
Otzhe, řidiči rozhodčího řízení pneumatik mají správnou prioritu, aby byli převedeni na první, aniž by bylo zajištěno fungování systému a v reálném čase a přenos informací. Rozdělení priorit pro různé typy různých typů musí být nastaveno jako vývojář pro každou hodinu návrhu.
Formát vzhledu
Pokud nepotřebujete opakovat proceduru opakování, bráno s milostí, existují dva typy komunikace mezi univerzitami: jedna univerzita přenese informace a druhá odmítne, nebo univerzita A bude napájet univerzitu B danou a informaci přijme.
Malý. 12.4. Datový rámec
Pro přenos pocty slouží jako rámec pocty Datový rámec(Obrázek 12.4), jak se pomstít:
- Identifikátor, který specifikuje typ služby ("speed_moving", "temperature_of_s") a prioritu přístupu ke sběrnici. Pole identifikátoru by se mělo lišit od počtu bitů podle protokolu: standardní formát CAN V2.0A má 11bitový identifikátor a rozšířený CAN V2.0B - 29bitový;
- pole dat, jak se příležitostně pomstít (otáčky motoru = 6000 ot./min., teplota oleje = 110 °C) až osm bajtů;
- dva byty kontrolní sumi - Kontrola cyklické redundance (CRC) pro odhalování těch oprav převodových milostí.
Pro podávání informací do univerzitního CAN vikoristovu rámu nakrmte daný Vzdálený rámec (obr. 12.5), který se má pomstít:
- Identifikátor, což je typ informace, způsob zapnutí („speed_moving“, „temperature_of_type“) a priorita příležitosti;
- dvoubajtové kontrolní sumi CRC.
Malý. 12.5. Snímek bude vložen do dat vzdáleného rámce
Na konci dne nemohou být přijata žádná data pro identifikátor a kód pro registraci nelze přímo uvést do výše uvedeného počtu bajtů. Univerzita, která je vyzvána k přenosu informací (teplotní senzor oleje), vysílá rámec dat, aby pomstil potřebné informace. Pokud tedy univerzita A pošle rámec univerzitě s identifikátorem „teplota_oleje“, pak univerzita B dodá teplotní senzor a pošle rámec univerzitě A, takže identifikátor „teplota_oleje“ je potřeba a informace jsou vyžadovány. .
Dodatkova informace, jak se pomstít v rámci, umožňující formát a synchronizaci přenosového protokolu v závislosti na typu nastavení:
- není-li indikováno - je dáno napájení nebo data nejsou dodávána daty z napájecího zdroje dálkového přenosu (RTR pro 11bitový identifikátor a SRR pro 29bitový);
- kód daného data, který se objeví, bajty dané za účelem pomsty za informaci; všechny univerzity berou rámec dat, dokonce i od nich, protože informace nejsou vyžadovány a nejsou brány;
- pro zajištění synchronizace a ovládání rámce přehoďte pole do rámce Začátek rámce, ukončete rámeček Konec rámce a potvrďte pole potvrzení;
- vstupte do režimu synchronizace na sběrnici, přejděte na první bit pole Start of Frame, vzdálenost synchronizace přijme přední strana, když se změní bit, a poté bude reagovat;
- vikoristovutsya mechanizm bitstaffing - vložení bitu před datem na začátku pěti nul nebo odinit.
Odhalení milostí
Signalizace o prominutí je znázorněna způsobem přenosu do rámce prominutí Error Frame. Vin іnіtsіyutsya být druh univerzity, jako když odhalil milost. CAN-řadiče vyvinout metodu statistického zpracování grantů. Kozhen vuzol pomstít milosti při vysílání a přijímání počítadla chyb přenosu a počítadla chyb příjmu. Pokud nedojde k žádnému vysílání nebo příjmu, dostanou milost, to znamená, že určitá osoba bude zachráněna. Pokud je význam lékaře perevischuyu mezhu, přenos proudu perepirivayutsya. Vysoká škola obdržela signál pro omilostnění jaka Error Frame, de-vistavlya aktivního dominantního zatykače pro 6 bitů. Při hře na univerzitu byl přenos takové koule přerušen a pokaždé se opakoval. Nevhodné nebo chastkovo pozkodzhenim vuzlam může být zbaven pasivního recesivního praporce.
CAN má několik druhů grantů. Pravidelně existují tři typy:
- CRC Error - prominutí kontrolních součtů (pokud je přijaté pole CRC mimo pořadí a kontrolní součty jsou počítány).
- Form Error – změna formátu rámce, pokud není kompatibilní s formátem CAN.
- Chyba při potvrzení – milost je schválena recepcí příležitosti, stejně jako univerzitami, které nepotvrzují správné odmítnutí příležitosti.
Kromě toho existují dva typy omluv hořkosti:
- Bit Error - pošleme sběrnici na sběrnici se skutečnými hodnotami pro implementaci mechanismu sebekontroly aktivní univerzitou.
- Stuff Error - výskyt šesti útočných úderů v poli po 0 nebo 1 (prominutí beatstaffingu).
Chovatelé cimmechanismů zřízení těch oprav pardonů Chybějící propustek je v kraji velmi malý. Například s rychlostí 500 Kb / s, vypnutím pneumatik o 25% a licencí na dobu 2 000 let za cenu vína, pokud pouze jedno není k dispozici za 1 000 rublů. Navíc pneumatika není v dobré pozici k tomu, aby blokovala roboty nesrovnatelnou univerzitou. Takové univerzity jsou viditelné a napojené na burzu autobusem.
Pro připojení příloh třetích stran potřebujete speciální adaptéry ( adaptér can-bus), které umožňují použití všech funkcí a implementaci vimogi palubní systémy auto.
Adaptér Can-bus Keru spuštěním digitálních podsiluvach (Pioneer, Rockford, BOSE, KIA, JBL), odesláním signálu pro aktivaci zadní kamery, z informací z parkovacích , vidvorenih) stop).
Pád z auta adaptér can-bus zkontrolujte funkce.
Pro vozy Toyota, ve kterém є pidsiluvach, adaptér pro nový robot s magnetem je instalován. Adaptér umožňuje „zvukovému schématu“ vozu regulovat hlasitost zvuku mezi předními a zadními reproduktory, levou a pravou stranu vozu a také hlasitost samotného řidiče. U většiny nástavců lopaty a hlavice, které jsou v prodeji, není daná funkce přenesena.
Zvláště varto vid míní adaptér can-bus pro KIA Sorento a KIA Sportage, pro který je instalován digitální pidsiluvach. Obecně platí, že přenos zvuku do digitálního viglyadі viklyucha být jako vedení, zvuky a pereshkodi.
Před magnety je nutné se připravit, protože nepotřebujeme používat adaptéry pro roboty s digitálním ovladačem, připojujeme je bez přechodu k reproduktorům. Pro takové schéma připojení použijete ovladač a zároveň doufáte ve zvuk. Jednou zárukou správné instalace může být adaptér can-bus, který bude do vozu instalován pro přidání digitálního ovladače.
Pro vozy Volkswagen / Škoda signál pro aktivaci příslušenství (ACC), ovládací tlačítka kerm a signály jsou přenášeny přes může autobus auto. Bez vítězného práva adaptér can-bus je nutné vážně svěřit auto do vnitřního vedení vozu, vrahoyuchi veškeré dědictví těchto svěřeno. Také na obrazovce maxidotu v autě se zobrazuje číslo radiostanice a informace o magneto stanici.
Pro vozy Mazda adaptér can-bus nutné robotické vypnutí počítače a navigaci pro připojení a správnou funkci řidiče. Při výměně nástavce hlavy a instalaci adaptéru se tlačítko INFO přenese na kermo, takže může být poškozeno pohodlným magnetem. Navíc v některých verzích Mazda 3 (arabština, čínština, brazilská zbirka) se funkce vivedennya z počítače nepřenáší, je nainstalováno magneto adaptér can-bus z auta si odnesete nové funkce - tři počítače (střední, která mittєva vitráta paliva, rezerva chodu, střední rychlost taky). V takové hodnosti, pokud se neochudíte o jasný zvuk, navigujte a rozšiřte funkčnost svého vozu.
Can-bus adaptér pro vozy Mitsubishi (Pajero, Outlander XL, ASX, LancerX) funkce připojení magnetů na digitální podsiluvach Rockford.
Digitální ovladače Rockford Fosgate, které jsou vybaveny vozy Mitsubishi, mohou implementovat ofenzivní funkce:
Pět kroků často ovládaných subwooferem
Nastavení vyvážení zvuku: přední-teal, živo-pravý
Nastavení pidsiluvach do režimu MUTE
Vimknennya pidsilyuvacha, pokud chyba není vítězná.
Kupte si osazenstvo magnetolu, vyměňte jej, abyste po instalaci nepřišli o funkčnost přímo z krabice. Dobře se orientujte v autě, můžete malovat yogo, ne navpaki. Viktoriánské adaptéry can-bus umožňují nejen správnou instalaci magnetu, ale také rozšíření funkčnosti vozu.
Před denními auty je k dispozici stále více vimogů. Vimogi k bezpečnosti, pohodlí na hodinu, ekologická bezpečnost a hospodárnost neustále rostou.
Nové technické produkty jsou stále efektivnější a počet produktů je stále ambicióznější. Tse і pokrok і tse dobré. U takového vína postoupím např. ABS, bez polštáře, zvýšení automatické založení kusové klima; do designu vozu byla přidána jen malá část aplikace z velkého množství technických inovací, jako za posledních deset let.
Vývoj vývoje vývoje elektronických systémů. U moderních vozů třídy, která je vybavena automobilem, je zablokováno 25 až 60 elektronických systémů, které mohou být mezi sebou propojeny drátovým spojením.
Typičtí provinční dodavatelé mají kabely růží a další podložky, které jsou malé velikosti, a někteří z nich mají ještě nákladnější virobní procesy. Ani nemyslet na problémy, mohli být diagnostikováni hodinu, aby diagnostikovali problémy v takových autech. Za mechaniky, kteří rezignovali na sto padesátý vtip o nespravedlnosti, za který zaplatili zákazníkovi, draze zaplatili. Výměna daných mezi malými a útulnými přílohami za takovou technologii také zůstává mezi mladými.
Historie sběrnice CAN
Automobilový průmysl proto v roce 1983 oznámil, že potřebuje matku mít takový komunální systém, jak by mohl nazvat připoutání keruyuchi mezi sebou do jediné hranice, aby nebral v úvahu nutnou výměnu daní. Systém má na svědomí následující:
- nedostatek předpojatosti s šedou
- budova v reálném čase pro shvidkodiya
- dočasnost
- vysoká úroveň zabavení z elektromagnetického pereskod
Systém výměny dat Nayposhirenisha - CAN-bus
- 1983 Ear of CAN Rosette (Bosch)
- 1985 Ucho spolupráce od Intelu
- 1988 První sériový typ CAN od společnosti Intel
- 1991 Perche zasosuvannya CAN in šedé auto(třída S)
- 1994 Je požadován mezinárodní standard pro CAN (ISO 11898).
- 1997 Perche vikoristannya CAN u salonі (třída С)
- 2001 Vikoristannya CAN v malých vozech (Opel Corsa) v pohonu a karoserii
Znamená to CAN?
CAN je zkratka pro Controller Area Network
Přenos přepíše danih CAN-BUS
- výměna daných dat, která mají být zobrazena na všech stranách budovy pomocí přílohy
- Možnost snímání signálů bagatoraz v senzorových senzorech
- i dočasně rychlost přenosů
- nízká viditelnost odlišné typy ovládání během přenosu pocty
- Chcete-li rozšířit možnosti, požádejte o to natolik, abyste provedli změnu zabezpečení softwaru
- systém CAN je standardizován ve všech směrech, což znamená, že je možné vyměňovat data s jinými mobilními zařízeními
Takže i CAN-BUS?
Systém přenosu těchto sběrnic CAN lze zaplatit na viglyadі sběrnice. Tak to je, jako autobus značek pro přepravu cestujících, tak
Systém CAN-bus přenáší velké množství informací. Bez systému CAN-bus by byly všechny požadované informace přenášeny do řídicích jednotek za velkým počtem provinčních zemí. Tse znamená, že pro informace o kůži existuje pouze jeden vodivý kanál.
Pro dodatečný přenos těchto CAN-sběrnic se změní počet řadičů příloh. Na celou výměnu informací mezi hospodářskými budovami, která je řízena, nahlížejí maximálně dva průvodci. V halách automobilů roste technologie z'єdnan (ježek). Stručně rozeznatelné rysy jejich jednání.
Schéma Zirka
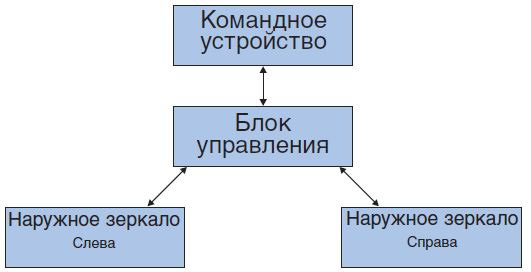
- za schématem "zirka" jsou všechny prvky výměny dat uzamčeny do jednoho centra (řídicí jednotka)
- pokud se blok keruvannya kazí, pak je v pořádku se zlomit
Schéma "kіlce"
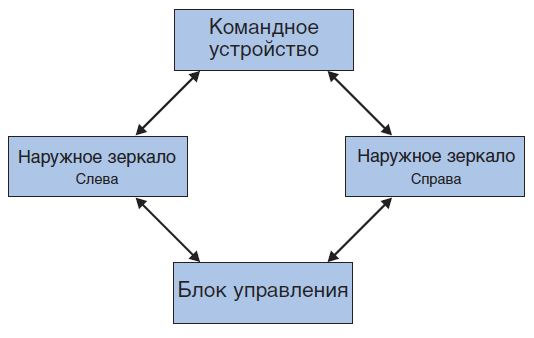
- pro schéma "kіlce" budou všechny prvky vyměněny s údaji o sebeurčení.
- Schob pochází z přílohy A k prist_y, informace je vinna projít o jeden prist_y více.
- Pokud je jeden nastaven tak, aby šel ke dveřím, pak systém projde dveřmi.
- S obnovou dat se pracuje ještě snadněji, ale pro všechny vaše potřeby je potřeba provoz na hodinu opravit.
Spojnicový diagram
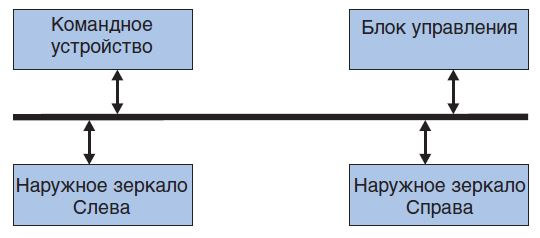
- přenosový signál je šířen po vedeních.
- pokud se někdo pokusí vstoupit z pražce, je nutné pokračovat ve výměně dat mezi sebou.
Připojte systém a vyměňte si data
Linkové schéma se nejčastěji používá v automobilech, schéma systému CAN-bus je k vidění zde.
- Merezheviy vuzol: Před vstupem do mikrokontroléru, řadiče CAN a ovladače sběrnice.
- Mikrokontrolér: Hodnoty pro nepřerušení ovladačem CAN a zpracování dat, které jsou přenášeny a přijímány.
- CAN ovladač: Významy pro zabezpečení režimu vysílání a příjmu.
- Boosdriver: Přenos zajistím, stejně jako přijmu.
- Propojit kanál: Є dvouvodičový vodič (pro oba typy signálů: CAN-High a CAN-Low). Pro změnu elektromagnetických přechodů jsou vodiče stínění.
- Namista svetr: 120 V navantuvalny rezistor pro vzhled exo signálu na žádost poskytovatele a pro akceptaci signálu.
Jak pratsyuє namista?
Přenos dat pro další CAN-busy je založen na principu telefonické konference. Účastník (řídicí jednotka) své informace (data) před přenosem „miluje“, aby účastníci informace „slyšeli“. Účastníci deyaky znají informace ciu cіkava a vicoristovuyu її. Інші prostě ignoruj її.
Auto bylo opraveno, ale dveře ze strany vody byly vymyšleny nedopatřením. Aby modul kontroly a kontroly mohl projít procesem, potřebuje dvě informace:
- auto se zhroutí.
- dveří ze strany přípojky.
Informace jsou odeslány do senzoru pro dveřní kontakt / a budou převedeny na elektrické signály. Všechny elektrické signály jsou překonfigurovány, nyní digitální informace, a obousměrný kód bude přepsán kanálem přenosu dat, pokud nebudete muset přejít na správné nastavení. Před signálem o obalení kola je signál nezbytný pro stejné přílohy, například pro přílohu. Cenu porovnejte i s některými dalšími vozy, které jsou vybaveny systémem aktivního pojezdu. Vždy jde o rychlost změnit myšlení, aby se optimalizovala pozice vozu na silnici. Všechny informace prošly kuličkami a mohou být analyzovány účastníkem kůže.
Systém přenosu dat CAN-bus є systémem multimaster - systém vícenásobného přístupu, což znamená následující:
- všechny méně obvyklé univerzity (keruyuchі přílohy) jsou si rovny.
- Všichni smradi však mají přístup k systemistovi, zpracování nedostatků a kontrole pohledů.
- kožená jedlovec univerzita to může udělat nezávisle a nezávisle bez pomoci jiné hemoragické univerzity as přístupem k přenosovému kanálu.
- jakmile bude představen jeden luxusní vuzol, stojí za to vyjít z rámce celého systému.
V systémech s více přístupem je přístup k přenosu nekontrolovaný, takže dokud je přenosový kanál těchto displejů dostupný, přístup k
existuje spousta společných univerzit. Yakby se stal tak, že všechny informace byly po celou dobu odesílány přes noc
Tse mohl přinést hold "uzavření". Otzhe, následuj rozkaz. K tomu je v systému CAN-bus načtena hierarchie – jde o to, že své informace můžete poslat těm nejlepším a že je můžete získat. V průběhu programů nižších univerzit je určité množství práce, upadlo to kvůli důležitosti tichých poct. Zgіdno z Chergoy, hold z práva vyšší priority є první k datu z práva nižší priority. Jako dohled nad dary od nízkorozpočtové univerzity s nejvyšší prioritou jsou pak nízkorozpočtové univerzity automatické.
Jak dіє ієrarchіya (přenosová logika) v systémech CAN-bus?
zadek:
Ve skutečnosti, pokud pocházíte z přílohy, budete mít možnost vidět technickou bezpečnost například z řídicí jednotky ABS, v závislosti na
Příležitostná řídicí jednotka pohonu bude mít vyšší prioritu.
Systémy CAN mají rozdíl mezi dominantním a recesivním přenosovým poměrem. Recesivní rіven hodnota 1 a dominantní
rivn hodnota 0. Nyní, pokud je blokování ovládání bohatě dostatečné na to, aby napájelo přenos dominantní a recesivní rivnya, pak
pristіy je dominantní rіvnem іn thе right tо nоtіslat уоur sоwіdіdіnnja nаmеr.
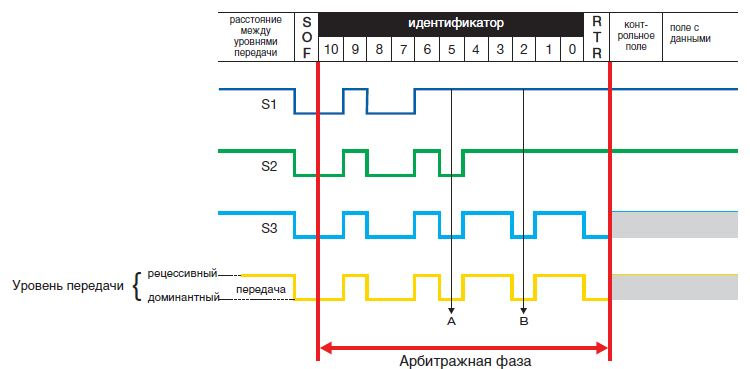
Ve všech aplikacích můžete před přenosem dat znovu vysvětlit přístup. Chci převést tři různé univerzity podle jejich datových systémů. Před hodinou procesu rozhodčího posouzení - volba hodnocení - řídící jednotka S1 přerušte její přenos do bodu A, ve stejném recesivním stádiu by měly následovat dominantní strže výkonových nástavců S2 a S3.
Vážně pristіy S2 přeruší svůj přenos v bodě ze stejného důvodu, který byl naznačen dříve. S takovou hodností bude horní část odstraněna z keruyuch prist_y S3, takže nyní můžeme předávat naše zprávy.
Jaký je protokol Danih?
Po předání pocty bude i krátkou hodinu následovat protokol o poctě. Protokol je uložen v majestátním počtu bitů informací distribuovaných v pořadí zpěvu. Počet bitů spočívá ve velikosti tribute pole. Bit є nejmenší informační jednotka, vidíme bity nastavené bajty = odeslány. Proces odesílání digitálního formuláře lze otáčet o hodnoty 0 nebo 1.
Přenos dat CAN-bus do osobního automobilu
V našich současných vozech máme 2 systémy sběrnice CAN:
Shvidkisna přenos pocty – High = Speed-Bus (ISO 11898)
- SAE CAN třídy C.
- přenos dat 125 Kbit/s - 1 Mbit/s.
- převody až 40 metrů rychlostí 1 Mb/sec.
- přenosový výstup > 25 mA.
- nízká životní míra.
- až 30 univerzit.
Zavedení vlastních vysoce kvalitních přenosů tribute (přenos kritických informací v reálném čase v milisekundách), systém sběrnice tsya
Znal jsem stázi v pohonných jednotkách, svázaný se sebou v jediné síti jsem řezal bloky keruvannya motorem, převodovkou, pojezdovou částí s tím galms.
Přenos nízkorychlostní sběrnicí (ISO 11519-2)
- Třída SAE CAN Art.
- Přenos Danih 10 Kbit/s - 125 Kbit/s.
- maximální množství převodovky
- odchozí přenosový proud< 1 мА.
- systém st_yka na krátké blikání.
- nízká životní míra.
- až 32 univerzit.
Systém zná vlastní úložiště v salonu, svázané spolu se sebou v jedné síti, komponenty elektronických univerzit těla palubní elektroniky,
pro pohodlí.
Diagnostika systému CAN-BUS
Možné poruchy systému CAN-bus:
- holení poskytovatele.
- ohromen na masu.
- ztrácet se na baterii
- blednutí CAN-High / CAN-Low.
- Nadto nizka napruga vivlennya / dobíjejte baterii.
- viditelnost odporových propojek.
- pružiny pereskod, například, je špatné vypálit kočku, ale wiklikє na signál.
Šok z nespravedlnosti:
- převést systém na robota.
- napájet banku nesrovnalostí.
- Seznamte se se změnou dynamických charakteristik.
- vložte signál na obrazovku osciloskopu.
- přehodnotit hranici.
- vimіryaty opіr průvodce.
- vyměňte propojky odporu.
Šokujte příčiny nedostatků
Před klasem je třeba najít vtip o příčině nerovnosti na všech autopřístavech, např.
od přenosových systémů k přístupu k systémům přenosu informací. Může se stát, že průnik do systému byl zničen. Převodový systém může najít závadu na závadách v převodových systémech. Vir_shalnim є ti, kteří jsou schopni tlačit na virobnik. U doplňkového nástroje pro diagnostiku může být náznak nepravdy, pokud má vámi objednané zařízení speciální zařízení, nebo pokud v objednaném „pouze“ používáte tester a osciloskop. Pro maminky je také ještě důležitější mít svá speciální data pro auto (elektrické obvody, zprávu popsat přenosové systémy atd.)
Hodinu se dělá vtip o nespravedlnosti, všichni stojí za pomocí testeru nebo osciloskopu, den je potřeba na operace, je potřeba strukturální rozhodnutí. To znamená, že se ten nepoměr dá lokalizovat a to „promotérům“ odpustíme, aby se daly použít v robotech a aby byly přerušovány těmi potřebnými. Aby to V mohl vidět na správném místě, bylo to jako pažba špatné věci na konkrétním autě. V našem vipadku tse bude (tělo W210).
Bulo o takové nerovnosti prohlásil:
Sklopidyomnik ze strany spolujezdce není dobrý.
Přehodnocení řízení:
1. Lze se do obchodu vejít z místa vody?
Obecně platí, že v rozporu s uchycením dveří jsou poskytovatelé systému CAN-bus a elektromotorického pohonu umístěni na pracovišti. Nesrovnatelnost pole, ymovirno, u poloviny vimikach, sklopidyomnik ze strany spolujezdce.
Qi může být rychlejší s jinými funkcemi (například změnou polohy zrcátka)?
Protože je možné urychlit dalšími funkcemi, je nutné jej použít pro připevnění dveří ke dveřím a umístění CAN bus systému v pracovní stanici. Mocný důvod poruchy є porucha vimikach sklopidyomnik ze strany vody nebo elektromotoru na sklopidyomnik ze strany spolujezdce. Můžete se naučit, jak překonfigurovat funkci ze sedadla spolujezdce. Pokud sklopidyomnik pratsyuє, pak lze zapnout elektromotor. Pro vtip o nespravedlnosti je nutné posadit se na vimikachi ze strany vody.
Není možné jej přenést do dne s funkcemi posedu, ale je možné být na straně spolujezdce, ale důvodem nerovnosti je nekompatibilita systému sběrnice CAN nebo nekompatibilita uchycení řidiče.
Správný a nesprávný obraz osciloskopu


Pro připojení osciloskopu k systému CAN-bus potřebujete znát požadovaný bod připojení. Zpravidla byste se měli nacházet na růžovém nástavci, kde můžete spravovat a řídit svou sběrnici CAN. Na našem zadku na straně spolujezdce, u kabelového kanálu pod kanálem (oslňující malí), є rozpodilnik potenciál.

Zde se sbíhají poskytovatelé CAN-bus ze všech vedlejších budov najednou. Osciloskop můžete bez problémů připojit k rozvodu potenciálu.

Pokud připojený osciloskop není citlivý na signál, je poškozen přenos těchto sběrnic CAN. Aby to bylo výrazné, na jakémkoli místě je nerovnost, teď je potřeba vidět nějaké růže. Současně je zobrazen osciloskop. Když se signál zobrazí na obrazovce osciloskopu, objeví se signál, systém CAN-bus ví, jak pracovat. Nesrovnatelnost systému se zástrčkovou růžicí. Zkuste růže posbírat, než je budete muset položit na místo. Pokrok paseky je v tom, že je důležité, což je nejvíce cheruyuyu připoutanost k položení růží, je možné se odkazovat na nespravedlivý systém. Zde virobnik zhodnykh hold nerežírovat.
Abych si usnadnil chybu a zefektivnil ji, potřebuji znát způsob, jak to vyzkoušet, jelikož systém sám o sobě nefunguje. Vzhledem k samozřejmosti vlastností daného vozu, o elektrických údajích a rozložení řídicích bloků, může být systém bez problémů chybný. Připojení růžiček ke korálkům CAN na kabelovém nástavci a zapnutí růžiček k potenciálnímu distributoru může být způsobeno tím, že příčina poruchy je v připojení kabelu nebo nástavci keruvalue. Dokud lze signály na osciloskopu rozeznat, je systém CAN-bus umístěn v pracovní stanici a kabel je rovněž umístěn v pracovní stanici. I když je signál na osciloskopu připojen k přístavbě, důvod nerovnosti pólu je v nedostatečnosti samotné přístavby. Pokud byla zjištěna skutečnost nepřiměřenosti kabelového připojení, pak je v případě chyby možné, že dojde k záměně v síti nebo plus, nebo pokud je připojen pomocí vodičů.

U vozů, které nemají rozdíl potenciálů, je hluk nerovnosti výrazně větší. Osciloskop se připojuje na vodiče CAN-busu formou vhodnou pro celou zprávu (např. na růžové řídící jednotce). Pak je nutné, podle znalostí všech příloh, jak ovládat, a růžici CAN-bus od sebe bez středu od řídicích bloků. Obecně je potřeba mít technickou dokumentaci s údaji o voze, viditelnosti, jako jsou přílohy a destrukce. Před zobrazením růží a obrázků zobrazení růží je nutné zkontrolovat obrázky na obrazovce osciloskopu. Nástup událostí nevypadá, jako by byly tiše na zadku našeho auta.
Pro výměnu odporových propojek je nutné použít CAN sběrnici v režimu spánku. Keruyuchі přílohy na hodinu strávenou uprostřed dne. Zagalny opir, který je uložen paralelně se zahrnutím stejných rezistorů 120 Ohm, se stane 60 Ohm. Tsei opiruetsya mezi poskytovateli CAN-High a CAN-Low.
Montáž dalších přístavků
Instalace dalších přídavných zařízení, například navigačních systémů, pro roboty, které potřebují odstranit signály ze systému CAN-bus, je složitý problém. Vona polyagaє v první řadě proto, abychom znali správné místo pro přístup, například před vypnutím signálu na rychlost vozu, ale není snadné vidět technickou dokumentaci vozu.
Na veledůležité stránce se dozvíte informace o způsobech připojování a zakládání nových příloh. Zároveň, uvědoměle, nedávají žádné záruky, takže v každém případě jsou všechna rizika na zadní straně hlavní autoopravny, pokud vám takový dan může stát v cestě. Nicméně v každém případě existuje určitý způsob - cena za seznámení se s technickou dokumentací virobniku vozu. Aby se od nás učili mobilní systémy CAN-bus, vivchit přenos hold, pristіy, na robota, který se chvěje křivd, dalі - jak si můžete nainstalovat další přílohy - pro jakoukoli vypadku je možné předat speciální navchannya.
Často, když si koupíte tažné zařízení, dostanete podbati blok počasí. Pick-up - pro koho je požadován a pro koho není možné propojit s extravagantní univerzální sadou elektriky pro pohon tažného zařízení pro tyto vozy.
Smart Connect t - z angličtiny je možné přemístit, jako "chytré připojení". Je to úplně stejný způsob, jak připojit elektriku k jiným vozidlům vybaveným skládacími elektronickými obvody a palubními počítači.
V moderních automobilech se tzv. can-bus (can-bus) nazývá can-bus, nebo jsou to typy analogových a digitálních sběrnic. Can-bus je vyžadován pro kolotoč skládacích bezpečnostních systémů a systémů pro snížený jízdní komfort (ABS, ESP, TSP atd.). Systém nepotřebuje, aby senzory procházely kožním senzorem jako minimálně jeden vodič, takže převodník přenáší velké množství všech vodičů.
Kan-shinoyu je řízen palubním počítačem, pokud jsou všechny signály posílány pouze na dva vodiče. Je-li potřeba přijímat signál zpěvu z náročného stroje, bude tam instalována i příslušná dekódovací jednotka, kterou lze přijímat ze signálu (snímač, motor, mechanismus).
Udělejte si rychlý obrat osobní automobil situace viglyadє tak. Před dekodérem bloků zadních světelných linií vozu (nohy, rozměry, prototypy, blinkry, zadní zatáčení a dovnitř.) přijdou dvě šipky a je jich asi deset. Teoreticky se můžete pokusit připojit k dekodéru před dráty a neinstalovat blok počasí Smart Connect. Ale není to tak jednoduché, pardon, za takový pokus o připojení vozu k kontrolnímu kontrolnímu systému (CC). Podvіyne zbіlshennya navantazhennya přes účes svitlotekhnіka produkovat podporu lantsyug. U mé vlastní banky reagoval palubní počítač vozu na nehlučnost systému. Reakce může být zcela odlišná, když se pokusíte připojit lancetu, když se pokusíte připojit lancetu, znamená to, že zadní světla jsou špatně na nejnovější "závady" ve světelné technice a když sejdete z cesty auto. Osa pro takové problémy a blok počasí Smart connect.
Jak se mohu připojit přes Smart Connect?
Elektřina s jednotkou can-bus je spojena, neboť jde o mimořádný univerzální výkon - lisováním svorek na paralelní spoje. Alle připojení jít do uzgodzhennya bloku, a ne do zásuvky tažného zařízení. Samotná jednotka je podklyuchayutsya dodatkovo k baterii nebo dart života. V takovém případě, když zapojíme účes, dostanete pouze jasný signál, abyste zapnuli tento elektrický zdroj a došli k zásuvce tažného zařízení i přes výstup na smart-connect jednotku, která je napájena z palubní baterie bezposredno. K tomu není zapnuto napájení v elektrickém systému vozu, stejně jako ovládání palubního počítače, prostě nejde o restrukturalizaci nezúčastněných vnějších spojů. Univerzální blok počasí bude instalován do velkého množství současných vozů.
je to možné v kadeřnictví.
Důležité!
Pokud je váš vůz vybaven režimem tažení, režim chytrého připojení nebude fungovat. Pro aktivaci těchto a dalších režimů je nutné vybrat originální bloky počasí pro konkrétní vůz.



