CAN პროტოკოლი არის ISO სტანდარტი (ISO 11898) სერიული გადაცემის სფეროში. პროტოკოლი დაიშალა იმ მიზნით, რომ ვიკორასტანია სატრანსპორტო დამატებები. დღეს ფართო სიგანის CAN შევსება გამოიყენება სამრეწველო წარმოების ავტომატიზაციის სისტემებში, ასევე ტრანსპორტში.
CAN სტანდარტი შედგება ფიზიკური დონისა და მონაცემთა გადაცემის დონისგან, რომელიც განსაზღვრავს სხვადასხვა სახის დახმარების რაოდენობას, ავტობუსში წვდომისას კონფლიქტების აღმოფხვრის წესებს და მარცხისგან დაცვას.
CAN პროტოკოლი
ISO 11898-1 სტანდარტის აღწერილობების CAN პროტოკოლი შეიძლება მოკლედ დახასიათდეს შემდეგნაირად:
წყვილის ტორსიაზე მონაცემების ფიზიკური დაწნული ვიკორისტოვუს დიფერენციალური გადაცემა;
ავტობუსზე წვდომისთვის, არა-გაფუჭებამ გამოიწვია კონფლიქტები;
ინფორმირებულობა შეიძლება იყოს მცირე (8 ბაიტზე მეტი მონაცემები) და დაცული საკონტროლო ჯამით;
povіdomlennyah vіdsutnі vyvnі მისამართებზე, natomіst kozhne poіdomlennya პატივცემული რიცხვითი მნიშვნელობა, როგორიცაა keruє yogo სიბნელე საბურავზე და ასევე შეიძლება იყოს იდენტიფიკატორი ნაცვლად voіdomlennya;
მოფიქრებულია შეწყალების დამუშავების სქემა, რომელიც უზრუნველყოფს შეხსენების ხელახლა გადაცემას, თითქოს სუნი მოქმედმა წოდებამ წაართვა;
• ეფექტური ზომები ავარიების იზოლირებისთვის და ავტობუსიდან გატეხილი კვანძების მოსაშორებლად.
უფრო დიდი თანასწორთა ოქმები
თავისთავად, CAN პროტოკოლი ნიშნავს ნაკლებს, რადგან მონაცემთა მცირე პაკეტების უსაფრთხოდ გადატანა შესაძლებელია A წერტილიდან B წერტილში დამატებითი საკომუნიკაციო საშუალების მისაღებად. Vіn, yak і slіd ochіkuvat, არაფერი თქვა მათზე, როგორიცაა ქერუბათი ნაკადულით; გაგზავნეთ დიდი რაოდენობით მონაცემები, შეამცირეთ იგი 8 ბაიტიან შეტყობინებაში; არა უნივერსიტეტის მისამართების შესახებ; z'ednannya ძალიან მალე დაინსტალირდა. Qi წერტილები განისაზღვრება უმაღლესი ფენის პროტოკოლით (HLP). ტერმინი HLP მსგავსია OSI მოდელის და її შვიდი უდრის.
უმაღლესი დონის პროტოკოლები გამარჯვებულია:
დაწყების პროცედურის სტანდარტიზაცია, მონაცემთა გადაცემის უსაფრთხოების არჩევის ჩათვლით;
მე მივაწოდე შუალედური უნივერსიტეტების მისამართი ან დახმარების სახეები;
შეხსენების როზეტის დანიშვნა;
იმის უზრუნველყოფა, რომ შეწყალების დამუშავების პროცედურა ნაკლებია თანაბარ სისტემაზე.
კორისტუვალნიცკის ჯგუფები თხელია.
CAN-ის სფეროში თქვენი კომპეტენციის გაუმჯობესების ერთ-ერთი ყველაზე ეფექტური გზაა მონაწილეობა იმ სამუშაოში, რომელიც კეთდება თანამშრომლების ძირითადი ჯგუფების ფარგლებში. თუ არ აპირებთ რობოტში აქტიურ მონაწილეობას, კორისტუვაკის ჯგუფები შეიძლება იყოს ინფორმაციის კარგი წყარო. კონფერენციების ნახვა კიდევ ერთი კარგი გზაა ზუსტი ინფორმაციის წასაღებად.
CAN პროდუქტები
დაბალ დონეზე, ძირითადად, ორი ტიპის CAN პროდუქტია ხელმისაწვდომი ბაზარზე - CAN ჩიპები და CAN განვითარების ინსტრუმენტები. მეორეს მხრივ, არის კიდევ ორი პროდუქტი: CAN მოდულები და CAN დიზაინის ხელსაწყოები. ამ პროდუქტების ფართო სპექტრი ხელმისაწვდომია ბაზარზე ნებისმიერ დროს.
პატენტები CAN გალერეაში
პატენტები, რომლებიც დევს CAN დანამატების წინ, შეიძლება იყოს სხვადასხვა ტიპის: სიხშირის სინქრონიზაციის განხორციელება, დიდი მონაცემთა ნაკრების გადაცემა (CAN პროტოკოლს აქვს 8 ბაიტზე მეტი მონაცემთა ჩარჩო) და ა.შ.
კეროვანის გაყოფის სისტემები
CAN პროტოკოლი არის ძირითადი საფუძველი განაწილებული კონტროლის სისტემების განვითარებისათვის. კონფლიქტების მოგვარების მეთოდი, რომლებზეც CAN გაიმარჯვებს, უზრუნველყოფს, რომ CAN კანის კვანძი ურთიერთქმედებს შეტყობინებებთან, რომლებიც იგზავნება ამ კვანძში.
გაყოფილი კონტროლის სისტემა შეიძლება შეფასდეს, როგორც სისტემა, რომლის ინტენსივობა დაყოფილია სისტემის კვანძებს შორის. სხვა ვარიანტი არის სისტემა ცენტრალური პროცესორით და ადგილობრივი შესვლის პუნქტებით.
CAN გაფრთხილებები
CAN ავტობუსი ვრცელდება ფართო საბურავებამდე. Tse ნიშნავს, რომ ყველა უნივერსიტეტს შეუძლია ყველა გადაცემის მოსმენა. არ არსებობს ინფორმაციის გაგზავნის შესაძლებლობა კონკრეტულ კვანძზე, ყველა კვანძი ხარვეზის გარეშე მიიღებს ყველა ინფორმაციას. თუმცა, CAN ფუნქცია უზრუნველყოფს ადგილობრივად გაფილტვრის შესაძლებლობას, ამიტომ კანის მოდულს შეუძლია უპასუხოს მხოლოდ ჭიკჭიკის მოთხოვნას.
CAN მისამართი
შეუძლია მოგებით მოკლე შეტყობინებები - ინფორმაციის ველის მაქსიმალური სიგრძეა 94 ბიტი. შეტყობინებებს აქვთ გამოკვეთილი მისამართები, მათ შეიძლება ეწოდოს კონტენტ-მისამართი: შეტყობინების ნაცვლად ირიბად (იმპლიციტურად) მითითებულია ადრესატი.
ტიპი შეხსენება
არსებობს 4 ტიპის შეტყობინებები (ან ჩარჩოები), რომლებიც გადაიცემა CAN ავტობუსით:
მონაცემთა ჩარჩო (Data Frame);
დისტანციური ჩარჩო;
შეწყალების ჩარჩო (Error Frame);
გადატვირთვის ჩარჩო.
დანის ჩარჩო
მოკლედ: "Usіm privіt, є danі z markuvannyam X, podіvodsya თქვენ podobayutsya!"
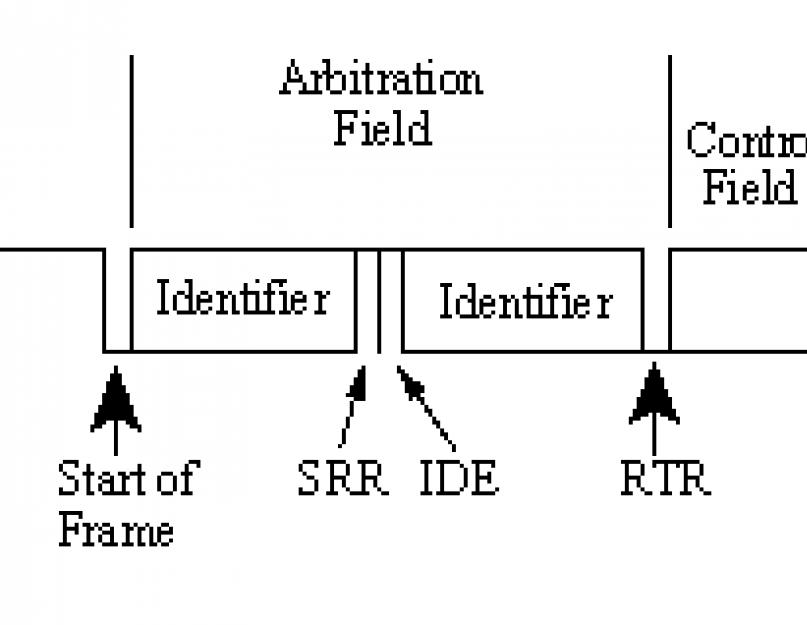
მონაცემთა ჩარჩო არის ყველაზე ფართო ტიპის შესავალი. შურისძიება საკუთარ თავზე, ასე რომ ძირითადი ნაწილები (დეტალები არ განიხილება სტილისთვის):
საარბიტრაჟო ველი (Arbitration Field), რომელიც მიუთითებს საქმის სიშავეზე იმ შემთხვევაში, თუ ავტობუსისთვის იბრძვის ორი ან მეტი კვანძი. არბიტრაჟის სფერო შურისძიებისკენ:
CAN 2.0A, 11-ბიტიანი იდენტიფიკატორის და ერთი ბიტის შემთხვევაში, RTR ბიტი არის ნაგულისხმევი მონაცემთა ჩარჩოებისთვის.
CAN 2.0B-სთვის, 29-ბიტიანი იდენტიფიკატორი (რომელიც ასევე შეიცავს ორ რეცესიულ ბიტს: SRR და IDE) და RTR ბიტს.
მონაცემთა ველი (მონაცემთა ველი) მონაცემთა 0-დან 8 ბაიტამდე შესატყვისად.
CRC ველი (CRC Field), რომელიც ანაზღაურებს 15-ბიტიან საკონტროლო ჯამს, დაცულია განახლების უმეტესი ნაწილით. Tsya კონტროლის თანხა vikoristovuєtsya ჩვენება შეწყალების.
აღიარების სლოტი. კანის კონტროლერი CAN, სწორად აშენებს otrimati vodomlennya, poznaet bit ამოცნობა (Acknowledgment bit) მაგალითად კანის დაავადება. პრიმახი ხელახლა ამოწმებს ამოცნობის ბიტის არსებობას და, როგორც ასეთი არ ჩანს, კვლავ აიძულებს შეტყობინებას.
შენიშვნა 1: ბიტის ამოცნობის ავტობუსში ყოფნა არაფერს ნიშნავს, გარდა იმისა, რომ ადრესატმა არ შეატყობინა მიმღებს გეგმების შესახებ. ერთადერთი, რაც ჩანს, არის სწორი otrimannya povіdomlennya ერთი ან dekіlkom ავტობუსის კვანძების ფაქტი.
შენიშვნა 2: საარბიტრაჟო სფეროს იდენტიფიკატორი, სახელის მიუხედავად, შეტყობინების ნაცვლად neobov'yazkovo іdentifikuє.
მონაცემთა ჩარჩო CAN 2.0B (სტანდარტული CAN).
CAN მონაცემთა ჩარჩო 2.0B ("CAN გაფართოებები").
მანძილის ჩარჩო
მოკლედ: "გამარჯობა, ვის შეუძლია შეაგროვოს მონაცემები X მარკირების შესახებ?"
შორიდან, ჩარჩო მონაცემთა ჩარჩოს მსგავსია, მაგრამ ორი მნიშვნელოვანი მახასიათებლით:
Vіn აშკარად აღნიშვნები, როგორც ჩარჩოს წაშლა (bit RTR არბიტრაჟის ველში є რეცესიული), მე
ხილული მონაცემთა ველი.
შორეული ჩარჩოს მთავარი ამოცანაა მონაცემთა დამოკიდებული ჩარჩოს სიძლიერის მოთხოვნა. თუ, ვთქვათ, A კვანძი ხელახლა აგზავნის ჩარჩოს საარბიტრაჟო ველის პარამეტრით, რომელიც უდრის 234-ს, მაშინ B კვანძი, რომელიც არის ინიციალიზაციის სათანადო თანმიმდევრობით, დამნაშავეა მონაცემთა ჩარჩოს გაგზავნაში საარბიტრაჟო ველის პარამეტრით 234-ის ტოლი.
მომავალში, ჩარჩოები შეიძლება შეირჩეს "გამშვები" ტიპის ავტობუსების მოძრაობის კონტროლის განსახორციელებლად. სინამდვილეში, პროტე, შორს, ჩარჩო ოდნავ იმარჯვებს. ეს არც ისე მნიშვნელოვანია, რადგან CAN სტანდარტი არ სჯის თავად აქტივობას, როგორც ეს აქ არის გამიზნული. მეტი CAN კონტროლერი შეიძლება დაპროგრამდეს ისე, რომ ისინი ავტომატურად გაიგზავნება დისტანციურ ჩარჩოში, წინააღმდეგ შემთხვევაში ადგილობრივი პროცესორი იქნება ინფორმირებული.
ერთი ხრიკი, რომელიც დაკავშირებულია ბოლო ფრეიმთან: მონაცემთა სიგრძის კოდი განპირობებულია ვიდეოში ბოლო გასუფთავებული შეტყობინების დაყენებით. წინააღმდეგ შემთხვევაში, კონფლიქტების მოგვარება შეუძლებელია.
ზოგჯერ საჭიროა ზარის გაგზავნა, რომელიც აგზავნის კადრს დისტანციურ ჩარჩოში მისი გადაცემის დაწყებისთანავე, მხოლოდ იდენტიფიკატორის ამოცნობით, ისე, რომ ცარიელი ჩარჩო დისტანციურ ჩარჩოში აღდგეს. შემდეგი წვეთი.
შეწყალების ჩარჩო (შეცდომის ჩარჩო)
მოკლედ (ერთბაშად, ვოკალურად): "ოჰ, ძვირფასო, მოდი ვცადოთ სხვა ვარდი"
შეწყალების ჩარჩო (Error Frame) – ეს არის სპეციალური გაფრთხილება, რადგან არღვევს CAN შეტყობინებების ჩარჩოების ფორმირების წესებს. დავეხმაროთ, თუ ვუზოლი გამოავლენს ზიანს და ეხმარება სხვა უნივერსიტეტებს ზიანის გამოვლენაში - და სუნი ასევე შეიძლება აიძულოს შეწყალების პერსონალი. გადამცემი ავტომატურად შეეცდება შეტყობინების გაგზავნას. არსებობს შეწყალების კარგად გააზრებული სქემა, რომელიც იძლევა გარანტიას, რომ VUZOL-ს არ შეუძლია შეაფერხოს ავტობუსზე მონაცემების გადაცემა პერსონალის შეწყალების დახმარებით, რაც მეორდება.
შეწყალების ჩარჩო ამოიღონ შეწყალების დროშა (Error Flag), რომელიც შედგება იმავე მნიშვნელობის 6 ბიტისაგან (ამ გზით, ანადგურებს ბიტების ჩასმის წესს) და შეწყალების დელიმიტაციას (Error Delimiter), რომელიც შედგება 8 რეცესიული ბიტისაგან. rozpushuvach pardon nada deaky space, რომელშიც სხვა საბურავებს შეუძლიათ შეწყალების ნიშანი შეასწორონ ამის შემდეგ, რადგან ისინი თავად აჩვენებენ შეწყალების პირველ ნიშნებს.
გადატვირთვის ჩარჩო
მოკლედ: მე უკვე პატარა ვარ, 82526, შეგიძლიათ მომცეთ პატარა შენიშვნა?
ინტერესის ჩარჩო აქ უფრო მეტია, ვიდრე უბრალოდ სურათი. VIN ფორმატის უკან, ის მსგავსია შეწყალების ჩარჩოს და გადაიცემა დაკავებული კვანძის მიერ. რეკრუტირების ჩარჩო იშვიათია, რადგან თანამედროვე CAN კონტროლერები უფრო პროდუქტიულია, რათა არ მოატყუონ. სინამდვილეში, არსებობს მხოლოდ ერთი კონტროლერი, რომელიც ქმნის ინტერესის ჩარჩოს - ce old 82526.
სტანდარტული CAN გაფართოების ბარათი
CAN სტანდარტის უკანა მხარეს, საარბიტრაჟო ველში იდენტიფიკატორების რაოდენობის დაყენებით, რომელიც 11 ბიტზე მეტია. მოგვიანებით, მყიდველების გულისთვის, სტანდარტი გაფართოვდა. ახალ ფორმატს ხშირად მოიხსენიებენ, როგორც CAN გაფართოებას (Extended CAN), ხოლო vin იძლევა იდენტიფიკატორში სულ მცირე 29 ბიტს. ორი ტიპის ჩარჩოების დაყოფისთვის, დაჯავშნა ხდება საკონტროლო ველის ბიტებზე.
ფორმალურად, სტანდარტებს ასე უწოდებენ -
2.0A - 11-ბიტიანზე ნაკლები იდენტიფიკატორები;
2.0B – გაფართოებული ვერსია 29-ბიტიანი ან 11-ბიტიანი იდენტიფიკატორებით (შეგიძლიათ შეცვალოთ ისინი). Vuzol 2.0B შეიძლება იყოს
2.0B აქტიური (აქტიური), tobto. გაგზავნეთ და მიიღეთ გაფართოებული ჩარჩოები, წინააღმდეგ შემთხვევაში
2.0B პასიური (პასიური), ტობტო. Vіn movchki skidatime otrimani გაფართოებული ჩარჩოები (ალა, მარველი ქვემოთ).
1.x - მიიყვანეთ თავდაპირველ სპეციფიკაციამდე და її ვერსიებზე.
ამ დროს, ახალი CAN კონტროლერები უნდა იყოს 2.0B ტიპის. კონტროლერი ტიპის 1.x ან 2.0A იქნება დაშვებული, წაშლის 29 ბიტი საარბიტრაჟო. კონტროლერი 2.0B პასიური ტიპი იღებს їх, upp_znaє, yakscho stink vіrnі i potіm skine; 2.0B აქტიური ტიპის კონტროლერს შეუძლია შეტყობინებების გადაცემა და მიღება.
კონტროლერები 2.0B და 2.0A (yak და 1.x) სულ. მათი არჩევა შესაძლებელია იმავე წერტილოვან ავტობუსზე, კონტროლერის დოკები 2.0B შეიძლება გამოყენებულ იქნას გაფართოების ჩარჩოებად.
ზოგიერთი ადამიანი ამტკიცებს, რომ სტანდარტული CAN არის "უკეთესი", ვიდრე გაფართოებული CAN, ამიტომ არის მეტი სერვისის მონაცემები გაფართოებული CAN-ის დამატებებში. Tse neobov'yazkovo ასე. როდესაც თქვენ გაიმარჯვებთ მონაცემთა გადაცემის საარბიტრაჟო ველზე, გაფართოებულ CAN ჩარჩოს შეუძლია შეცვალოს ნაკლები სერვისის მონაცემები, ვიდრე სტანდარტული CAN ქვედა ჩარჩო.
ძირითადი CAN (ძირითადი CAN) და CAN (სრული CAN)
ტერმინები Basic CAN და Full CAN იღებს კობს CAN ბავშვისგან. თუ იყენებთ Intel 82526 CAN კონტროლერს, მაშინ მიეცით პროგრამისტს ინტერფეისი DPRAM სტილში. შემდეგ Philips-მა წარმოადგინა 82C200 მოდელი, რომელშიც დაყენებული იყო FIFO-ზე ორიენტირებული პროგრამირების და ფილტრაციის მოდელი. პროგრამირების ორ მოდელს შორის განსხვავებების გასაგებად, ადამიანებმა დაიწყეს Intel-ის მეთოდს Full CAN და Philips მეთოდს Basic CAN-ის დარქმევა. დღეს უფრო მეტი CAN კონტროლერი მხარს უჭერს შეურაცხმყოფელ პროგრამირების მოდელებს, ასე რომ, აზრი არ აქვს ალტერნატიულ ტერმინებს Full CAN და Basic CAN - ფაქტობრივად, ამ ტერმინებს შეუძლიათ მაწანწალა ვიბრაცია და მათი სიცოცხლე დაიკარგოს.
ფაქტობრივად, Full CAN კონტროლერს შეუძლია იგივენაირად იმოქმედოს Basic CAN კონტროლერთან. პრობლემები summіsnіstyu vіdsutnі.
საბურავებზე კონფლიქტების აღმოფხვრა და შენარჩუნების პრიორიტეტი
მხარდაჭერის კონფლიქტების გადაწყვეტა (პროცესი, რომლის შემდეგაც ორი ან მეტი CAN კონტროლერი მარცხდება, ვინ დაირღვევა) კიდევ უფრო მნიშვნელოვანია მონაცემთა გადაცემისთვის გამტარუნარიანობის რეალური ხელმისაწვდომობის დასადგენად.
ნებისმიერ CAN კონტროლერს შეუძლია გამოავლინოს გადაცემა, თუ აღმოაჩენს, რომ ავტობუსი უმოქმედოა. თქვენ შეგიძლიათ მიიყვანოთ ის ფაქტი, რომ ორი ან მეტი კონტროლერი ერთდროულად იწყებს გაფრთხილების (მაიჟეს) გადაცემას. კონფლიქტი ამგვარად მწვავდება. გადამცემი ჰაბები პასუხისმგებელნი არიან ავტობუსის მონიტორინგზე განგაშის გაძლიერების პროცესში. როგორც ვუზოლი აჩვენებს დომინანტურ რივენს იმ საათში, რადგან ვინ მართავს რეცესიულ რივენს, არ არის კარგი კონფლიქტის დასრულების პროცესში ჩაძინება და პრიმაჩემი. Virishennya კონფლიქტები იქმნება არბიტრაჟის მთელ ველზე და ამის შემდეგ, რადგან ველი მოქმედებს, ავტობუსში მხოლოდ ერთი გადაცემაა. Tsey vuzol აგრძელებს ტრანსფერს, ასე რომ არაფერი მოხდება. სხვა პოტენციური გადამცემები შეეცდებიან თავიანთი შეტყობინებების გადაცემას მოგვიანებით, თუ ავტობუსი რეკავს. კონფლიქტის მოგვარების პროცესი საათს არ კარგავს.
კონფლიქტის წარმატებით მოგვარებისთვის მნიშვნელოვანი გონებაა სიტუაციის შეუძლებლობა, თუ ორ კვანძს შეუძლია ერთი და იგივე ველი გადაიტანოს არბიტრაჟში. პირველი წესიდან არის ერთი ბრალი: შეგახსენებთ, რომ არ იძიოთ შური მონაცემები, იქნება ეს ვუზოლი, რომელსაც შეუძლია ამბების გადმოცემა.
CAN-ავტობუსის ფრაგმენტები უკავშირდება ავტობუსს დანართებით "ინსტალაცია I" (სადენიანი-AND) და დომინანტური ბიტი (დომინანტური ბიტი) є ლოგიკური 0, ასევე ყველაზე დაბალი რიცხვითი გამოხატვის ველის გამოყენებით, არბიტრაჟი ითამაშება გარჩევადობაში. კონფლიქტი.
კვება: რა მოუვა vipad-ს, თუ მხოლოდ ერთი საბურავი შეეცდება შეხსენების გაგზავნას?
ვერდიქტი: ვუზოლმა, გონივრულად, მოიგო გამარჯვება კონფლიქტზე და წარმატებით შეასრულა შეტყობინების გადაცემა. და თუ დადგება აღიარების საათი... თუ უნივერსიტეტი არ ასწორებს აღიარების რეგიონის დომინანტურ ნაწილს, მაშინ გაუგზავნეთ მას, რომ მოაწეროს შეწყალება აღიარებისთვის, გაგზავნეთ შეწყალების ნიშანი, გადაიტანეთ თქვენი შეწყალების მნიშვნელობა 8-ზე. და შემდეგ ხელახლა გადაცემა. ეს ციკლი 16-ჯერ განმეორდება, შემდეგ გადაცემა პასიური შეწყალების სტატუსში გადავა. შეწყალების გაცვლის ალგორითმში არსებული სპეციალური წესიდან გამომდინარე, შეწყალების გადაცემის მნიშვნელობა აღარ არის მოცემული, რათა ვუზოლს ჰქონდეს პასიური შეწყალების სტატუსი, ხოლო შეწყალება არის შეწყალების აღიარება. იმ vuzol zdіysnyuvatime გადაცემის სამუდამოდ, სანამ tih ნაძვი, სანამ htos razpіznaє ხსოვნას.
მისამართი და შეტყობინების იდენტიფიკაცია
ვიმეორებთ, არაფერია საშინელი იმაში, რომ CAN-ში ზუსტი მისამართი არ არის. კანის კონტროლერი CAN იღებს ავტობუსის მთელ ტრაფიკს, ხოლო ტექნიკის ფილტრებისა და პროგრამული უზრუნველყოფის დამატებითი კომბინაციისთვის მნიშვნელოვანია "დააწკაპუნოთ" შეტყობინებაზე, chi n.
სინამდვილეში, CAN პროტოკოლს არ აქვს გაგებული შეტყობინების მისამართი. შეტყობინების ბუნება მითითებულია იდენტიფიკატორით, რომელიც ცნობილია აქ შეტყობინებაში. CAN შეტყობინებებს შეიძლება ეწოდოს "შინაარსის მისამართი".
მისამართები მიმართულია შემდეგნაირად: შეტყობინება X კვანძისთვის. კონტენტ-მისამართიანი შეტყობინებები შეიძლება აღწერილი იყოს შემდეგნაირად: "შეტყობინებები შურისძიების მონაცემების შესახებ X მარკირებით". განსხვავება ორ ცნებას შორის მცირეა, ale sutteva.
საარბიტრაჟო ველის ნაცვლად ის გამარჯვებულია, სტანდარტამდე, საბურავზე გაშავების მიზნით. ყველა CAN კონტროლერი ასევე მოიგებს მთელ (ან მის მხოლოდ ნაწილს) საარბიტრაჟო ველს, როგორც ტექნიკის ფილტრაციის პროცესის გასაღები.
სტანდარტი არ ჩანს, რომ არბიტრაჟის ველი არ იყოს გამორიცხული, როგორც გაფრთხილების იდენტიფიკატორი. Prote ce duzhe გაფართოებების ვარიანტი vikoristannya.
შენიშვნა იდენტიფიკატორის მნიშვნელობის შესახებ
ჩვენ ვთქვით, რომ ხელმისაწვდომი ID არის 11 (CAN 2.0A) ან 29 (CAN 2.0B) ბიტი. ჩვენ ამას არ ვეძახით სწორად. იმავე ძველ CAN კონტროლერთან შესაბამისობისთვის (გამოიცანით რომელი?), იდენტიფიკატორები არ არის ლოგიკურ ერთეულში ჩასმული 7 ყველაზე მნიშვნელოვანი ბიტის დედის ბრალი, ამ 11-ბიტიანი იდენტიფიკატორებისთვის ხელმისაწვდომია მნიშვნელობა 0..2031. და 29-ბიტიანი იდენტიფიკატორები შეიძლება დაირღვეს.
გაითვალისწინეთ, რომ CAN კონტროლერები იღებენ "არასწორ" იდენტიფიკატორებს, ამიტომ თანამედროვე CAN სისტემებში 2032..2047 იდენტიფიკატორები შეიძლება მიღებულ იქნეს საზღვრების გარეშე.
ფიზიკური უდრის CAN-ს
CAN ავტობუსი
CAN ავტობუსს აქვს შებრუნებული კოდი ბიტების ჩასმიდან ნულზე (NRZ) გადაბრუნების გარეშე. არსებობს სიგნალის ორი განსხვავებული ეტაპი: დომინანტი (ლოგიკური 0) და რეცესიული (ლოგიკური 1). სუნი რეკომენდირებულია მომღერალ ელექტრო ხაზებზე, რომლებიც უნდა იყოს ფიზიკურ დონეზე (მათი კილკა). მოდულები უკავშირდება ავტობუსს "ინსტალაციის I" (სადენიანი და) სქემის მიხედვით: თუ გსურთ ავტობუსი გადაიტანოთ დომინანტურ ქვეყანაში ერთი კვანძით, მაშინ მთელი ავტობუსი არის ამ ქვეყანაში, მიუხედავად იმისა, არის თუ არა ბმულები კვანძები გადაეცემა რეცესიულ ქვეყანაში.
სხვადასხვა ფიზიკური rіvnі
ფიზიკური რივენიგანსაზღვრავს ელექტრო გაყვანილობას და ავტობუსზე სიგნალების გადაცემის სქემას, კაბელის უახლეს მხარდაჭერასაც.
ფიზიკური თანასწორობის სხვადასხვა ვერსიის გამოყენება: ყველაზე გაფართოებული ვერსია, CAN სტანდარტის მიხედვით, ISO 11898-2-ის ნაწილი და ორსადენიანი დაბალანსებული სიგნალის წრე. ვინს ასევე ზოგჯერ უწოდებენ მაღალსიჩქარიან CAN-ს.
იგივე ISO 11898-3 სტანდარტის მეორე ნაწილი აღწერს კიდევ ერთ ორსადენიანი დაბალანსებული სასიგნალო წრეს უფრო პატარა შვედური ავტობუსისთვის. ავარიამდე დგას დგომა, მაშინ სიგნალების გადაცემა შეიძლება გაგრძელდეს იმ შემთხვევაში, თუ ერთ-ერთი მავთული მოიჭრება, დაამოკლდება „მიწაზე“ ან ვბათ ბანაკში. ზოგჯერ ამ სქემას უწოდებენ დაბალი სიჩქარით CAN.
SAE J2411 განსაზღვრავს ერთ მავთულს (პლუს დამიწება, აშკარად) ფიზიკურ შეფასებას. Vіn vikoristovuєtsya ძირითადად მანქანებში, მაგალითად GM-LAN.
Іsnuє kіlka საკუთრების ფიზიკური rivnіv.
გასულ საათში, როდესაც CAN-ის დრაივერები არ მუშაობდნენ, RS485 მოდიფიკაციამ გაიმარჯვა.
სხვადასხვა ფიზიკური ტოლი ბგერა ვერ ურთიერთქმედებს ერთმანეთთან. ზოგიერთი კომბინაციის პრაქტიკა შესაძლებელია კარგი გონება. მაგალითად, მაღალსიჩქარიანი და დაბალი სიჩქარის მიმღებებს შეუძლიათ იმუშაონ ამა თუ იმ საბურავზე.
CAN მიმღების IC-ების აბსოლუტური უმრავლესობა დამზადებულია Philips-ის მიერ; სხვა მოიცავს Bosch, Infineon, Siliconix და Unitrode.
ყველაზე დიდი გაფართოებაა 82C250, რომელშიც განხორციელებულია ფიზიკური დონის განხორციელება, რომელიც აღწერილია ISO 11898 სტანდარტით. გაუმჯობესებული ვერსია - 82C251.
Primach გაფართოებები "დაბალი სიჩქარით CAN" - Philips TJA1054.
მაქსიმალური სიჩქარეავტობუსის მონაცემთა გადაცემა
მონაცემთა გადაცემის მაქსიმალური სიჩქარე CAN ავტობუსით, შეესაბამება სტანდარტს, ღირებულება 1 მბიტი/წმ. თუმცა, CAN კონტროლერები მხარს უჭერენ 1 მბ/წმ-ზე მეტ სიჩქარეს და მათი შეცვლა შესაძლებელია სპეციალიზებულ დანამატებში.
დაბალი სიჩქარით CAN (ISO 11898-3, საოცარი) მუშაობს 125 კბ/წმ სიჩქარით.
ერთსადენიანი CAN ავტობუსს სტანდარტულ რეჟიმში შეუძლია მონაცემების გადაცემა დაახლოებით 50 კბიტი/წმ სიჩქარით, ხოლო სპეციალური მაღალი სიგანის რეჟიმში, მაგალითად ECU პროგრამირებისთვის, დაახლოებით 100 კბიტი/წმ.
ავტობუსში მონაცემთა გადაცემის მინიმალური სიჩქარე
Mayte on uvazі, scho deyakі pryymachi არ გაძლევთ საშუალებას ვიბრათი swidkіst დაბალია, ვიდრე სიმღერა მნიშვნელობა. მაგალითად, თუ იყენებთ 82C250 ან 82C251, შეგიძლიათ მარტივად დააინსტალიროთ სიჩქარე 10 კბ/წმ, მაგრამ თუ იყენებთ TJA1050, არ შეგიძლიათ დააყენოთ სიჩქარე 50 კბ/წმ-ზე დაბალი. შეამოწმეთ სპეციფიკა.
კაბელის მაქსიმალური სიგრძე
მონაცემთა გადაცემის სიჩქარით 1 მბ/წმ, კაბელის მაქსიმალური სიგრძე, რომლის გადახვევა შესაძლებელია, შეიძლება იყოს 40 მეტრთან ახლოს. ეს დაკავშირებულია კონფლიქტების მოგვარების სქემასთან და, შესაბამისად, სუსტი სიგნალის წინა მხარე განპირობებულია დედის უნარით, გადავიდეს შემდეგ კვანძში და უკან დაბრუნდეს პირველი ქვედა ნაწილი ბედნიერი იქნება. სხვა სიტყვებით რომ ვთქვათ, კაბელის სიგრძე გარშემორტყმულია swidkistyu შუქით. ხილული იყო წინადადებები იმის შესახებ, თუ როგორ უნდა გაზარდოთ სინათლის სიჩქარე, მაგრამ მათ შეძლეს დაენახათ გალაქტიკათშორისი პრობლემები.
კაბელის სხვა მაქსიმალური სიგრძე (დაახლოებითი მნიშვნელობები):
100 მეტრი 500 კბ/წმ-ზე;
200 მეტრი 250 კბ/წმ-ზე;
500 მეტრი 125 კბ/წმ-ზე;
6 კილომეტრი 10 კბ/წმ-ზე.
ვინაიდან ოპტოკუპლერები გამოიყენება გალვანური იზოლაციის უზრუნველსაყოფად, ავტობუსის მაქსიმალური სიცოცხლე სავარაუდოდ შემცირდება. Porada: დაამარცხეთ ოპტოკუპლერის სიჩქარე და გაოცდით სიგნალის დაძაბვით გაფართოებაზე და არა მონაცემების გადაცემის მაქსიმალური სიჩქარით სპეციფიკაციის მიხედვით.
Kіntseve საბურავების შეკეთება
ISO 11898 სტანდარტის CAN ავტობუსი შეიძლება შეწყდეს ტერმინატორით. მის მიღწევა შესაძლებელია ავტობუსის კანის ბოლოებამდე 120 Ohm-ის მხარდაჭერით რეზისტორის დაყენების გზით. შეწყვეტა ორი მიზნისთვის:
1. აიღეთ სიგნალი ავტობუსის ბოლოს.
2. შეცვალეთ, რომ მიიღოთ სწორი შტრიხი ტოლი (DC).
ISO 11898 სტანდარტის CAN ავტობუსი შეიძლება დამოუკიდებლად შეწყდეს სიჩქარის თვალსაზრისით. ვიმეორებ: ISO 11898 სტანდარტის CAN ავტობუსი შეიძლება დამოუკიდებლად ეწოდოს სიჩქარის მიხედვით. ამისთვის ლაბორატორიული სამუშაოშეგიძლიათ გამოიყენოთ ერთი ტერმინატორი. თუ თქვენი CAN ავტობუსი მუშაობს ტერმინატორებისთვის, თქვენ უბრალოდ გაგიმართლათ.
პატივი ეცით რა სხვა ფიზიკური rіvnіდაბალსიჩქარიანი CAN-ის მსგავსად, ერთსადენიანი CAN ავტობუსი და სხვა შეიძლება გავლენა იქონიოს ან არ მოახდინოს გავლენა ავტობუსის ტერმინატორის ხილვადობაზე. თუმცა, თქვენი მაღალი ტევადობის CAN ავტობუსი უნდა შეესაბამებოდეს ISO 11898 სტანდარტს მეტი სიცხადისთვის, თუ გსურთ ერთი ტერმინატორი.
კაბელი
ISO 11898 სტანდარტში ნათქვამია, რომ სუსტი საკაბელო საყრდენი ნომინალურად არის 120 ohms, მაგრამ ოჰმ-ის მხარდაჭერის ინტერვალის მნიშვნელობა დაშვებულია.
რამდენიმე ადამიანი იმყოფება დღეს ბაზარზე, კაბელები კმაყოფილია დიდი უმრავლესობით. არის დიდი იმოვირნისტი, რომ მხარდაჭერის ინტერვალური მნიშვნელობა მომავალში გაფართოვდება.
ISO 11898 აღწერს გრეხილ წყვილს, სკრინინგს ან ეკრანის გარეშე. ვცდილობთ იმუშაოთ SAE J2411 ერთსადენიანი საკაბელო სტანდარტის ზემოთ.
საბურავი CAN ავტობუსი Bula შეიქმნა 80-იანი წლების სტილში Robert Bosch GmbH-ის (Nimechchina) მიერ, როგორც გამოსავალი rozpodіlenih სისტემებისთვის, რომლებიც მუშაობენ რეალურ დროში. საბურავის დამახასიათებელი თვისებაა მისი მაღალი რხევა. CAN ავტობუსის დამატებითი უპირატესობა არის სტაბილურობა მექანიკურ გაუმართაობამდე - ავტობუსის გამტარები დახურულია ცხელ მავთულთან, სიცოცხლე ან ერთმანეთთან ურთიერთობა არ იწვევს შენობების ღობედან გასასვლელს. უფრო მეტიც, შენობის საბურავების მოდიფიკაციები ფუნქციონირებს ერთი საათის განმავლობაში, როდესაც ერთ-ერთი გამტარი გაპარსულია.
CAN ავტობუსი ინდუსტრიული თვალსაზრისით
საველე ავტობუსი CAN (Controller Area Network) ხასიათდება მონაცემთა გადაცემის მაღალი სიჩქარითა და საიმედოობით, ასევე პატიების გამოვლენის უნარით, რაც დამნაშავეა. ამ CAN-ის ლიდერები ახლა ფართოდ გაიმარჯვეს ისეთ სფეროებში, როგორიცაა ავტომობილები და გადაზიდვის ტრანსპორტი, სამრეწველო ავტომატიზაცია, ავიაცია, დაშვების და კონტროლის სისტემები. ასოციაციის CiA-ს მიხედვით (CAN in Automation, www.can-cia.de), ამჟამად მსოფლიოში დაახლოებით 300 მილიონი CAN კვანძია მოქმედი. გერმანიაში CAN-ავტობუსი პირველ ადგილს იკავებს საველე საბურავების საშუალო დიაპაზონის პოპულარობით.
CAN პროტოკოლის მახასიათებლები CAN-ის უპირატესობები
ავტომატიზაციის სფეროში მთავარი ტენდენციაა ტრადიციული ცენტრალიზებული კონტროლის სისტემის შეცვლა, ინტელექტუალური სენსორების განთავსებისთვის კონტროლის გზის განაწილება და პროცესის გაშვების მექანიზმების შეცვლა. ეს გამოწვეულია სადენების რაოდენობის ზრდით, გამოძახებების მატებით, შეწყალების დიაგნოსტიკის სირთულით და უზენაესობის პრობლემებით. ასეთი სისტემის კვანძებს შორის კავშირი მდებარეობს დამხმარე საველე ავტობუსის უკან. CAN არის საკომუნიკაციო სისტემა სხვადასხვა კონტროლის სისტემებისთვის. მოდით გადავხედოთ CAN-ის ანგარიშს და მიზეზებს, რის გამოც CAN სულ უფრო და უფრო ფართოვდება.
ტესტირების სტანდარტი. CAN პროტოკოლი 20 წელზე მეტი ხნის განმავლობაში აქტიურად ავრცელებს პოპულარიზაციას, რაც კიდევ უფრო მნიშვნელოვანია ისეთი კონსერვატიული სფეროებისთვის, როგორიცაა სარკინიგზო ტრანსპორტი ან გემთმშენებლობა. CAN buv splitting 1980 რ. ფირმა Robert Bosch საავტომობილო ინდუსტრიისთვის. CAN რეგულირების ინტერფეისი საერთაშორისო სტანდარტებით ISO 11898 მაღალი სიჩქარისთვის და ISO 11519-1 დაბალი სიჩქარის აქსესუარებისთვის. დაბალი ცვალებადობა მიეკუთვნება ფასის/პროდუქტიულობის კარგ თანაფარდობას, ისევე როგორც CAN კონტროლერების ფართო ხელმისაწვდომობას ბაზარზე. საიმედოობა განისაზღვრება ავტობუსის ხაზოვანი სტრუქტურით და კვანძების თანასწორობით, ეგრეთ წოდებული Multi Master Bus, რომლისთვისაც CAN კანის კვანძს შეუძლია წვდომა ავტობუსზე. იქნება ეს შეხსენების სახით, ის შეიძლება გაიგზავნოს ერთ ან dekilk უნივერსიტეტში. ყველა უნივერსიტეტი ერთდროულად კითხულობს ერთსა და იმავე ინფორმაციას ერთი და იმავე ავტობუსიდან და თუ ისინი უარს ამბობენ შეტყობინების მიღებაზე, ან უგულებელყოფენ მას. ერთსაათიანი მიღება ასევე მნიშვნელოვანია კონტროლის სისტემებში სინქრონიზაციისთვის. საბურავის გაცვლაში შედის ვოზლები, რომლებიც მართავდნენ.
Visoka Pereshkodostіykіst, რომ მიაღწიოს ნაწიბურებს Diehendanian Provisch-ის sneakers-ის შუალედში, mehang-ის რობოტების რობოტი (ერთი უპრეცედენტოა 1000 Rock_v-სთვის ამწე 8 წლის რობოტით / Schvidkostі 500 kbt) / პელოკოვიჩის მონანიებული.
მოქნილობა ხელმისაწვდომია ავტობუსთან მარტივი დაკავშირებისთვის და CAN ავტობუსთან დაკავშირებისთვის, ხოლო კვანძების საერთო რაოდენობა არ შემოიფარგლება ქვედა დონის პროტოკოლით. მისამართის ინფორმაცია იგზავნება აღიარებით და აღებულია იმავე პრიორიტეტით, რისთვისაც ტარდება არბიტრაჟი. მუშაობის პროცესს შეუძლია შეცვალოს შეტყობინების პრიორიტეტი. შემდეგში ასევე მითითებულია გადაცემული სიგნალის სიხშირისა და ფაზის დაპროგრამების შესაძლებლობა და არბიტრაჟი, რომელიც არ არღვევს მხარდაჭერის სტრუქტურას კონფლიქტების შემთხვევაში. ფიზიკურად შესაძლებელია სხვადასხვა ტიპის მონაცემთა გადაცემის ხაზების არჩევა: იაფი ფსონიდან ოპტიკურ-ბოჭკოვანი ხაზის კავშირამდე.
რეალურ დროში მუშაობა ხდება შესაძლო გამომწვევი მექანიზმი ურთიერთთანამშრომლობის მექანიზმებისთვის (მრავალმასტერ, ფართო ტრაფიკი, ბიტ-ბიტი არბიტრაჟი) მონაცემთა გადაცემის მაღალი სიჩქარით (1 მბ/წმ-მდე), სწრაფი რეაგირება გადაცემის ელექტრომომარაგება და ბაიტების რაოდენობის დიდი ზრდა.
შეუძლია
CAN იდეალური გადაწყვეტაა ნებისმიერი პროგრამისთვის, სადაც მიკროკონტროლერები ერთმანეთს ცვლიან და დისტანციური პერიფერიული მოწყობილობებით. CAN-ის მცირე რაოდენობა აიღეს მანქანებში კრიტიკული საათობრივი მოვლის უსაფრთხოებისა და ინფორმაციის გაცვლის მიზნით ძრავასა და გადაცემათა კოლოფს შორის, გარანტირებული საათით, რომ დადასტურებული იყო ღონისძიებაში მონაწილეთა კანის დამტკიცება მიმდინარე მონაცემებთან მუშაობისთვის. . ძვირადღირებული მაღალი ხარისხის გადაწყვეტილებების მისაღწევად, ასევე არსებობს ეკონომიური გადაწყვეტილებები რიგი ინერციული გარე შენობების დასაკავშირებლად, რომლებიც მუშაობენ ასობით მიკროწამში საათის მასშტაბით (კარის შემობრუნების, ფანჯრის შემობრუნების სისტემა. სარკე). ნებისმიერი დაჭიმვის შემთხვევაში, ელექტრო მავთულის აღკაზმულობა იცვლება ორმავთულიანი CAN ბადით, როგორიცაა კვანძები, მათ შორის გალვანური ნათურები და ბრუნვის მაჩვენებლები.
CAN ფართოდ გამოიყენება სამრეწველო ავტომატიზაციაში, არის დიდი რაოდენობით დანართები გათბობისთვის, სენსორებისთვის, მექანიზმებისთვის, ელექტროძრავებისთვის და სხვა ობიექტებისთვის, ერთი ტექნოლოგიური ციკლის შედეგად (გამწვარი სისტემები და კონდიციონერი, ტუმბოები, კონვეიერები, .დ. ) . ასეთი სისტემების მნიშვნელოვანი მახასიათებელია დიდ ტერიტორიაზე გავრცელებული ობიექტების დიაგნოსტიკისა და მართვის შესაძლებლობა ადაპტური ალგორითმების გამოყენებით. შედეგად, იცვლება დაძაბულობა, ხმაური და დაღლილობა. მსგავსი სურათი შეიმჩნევა აგრეთვე საჰაერო ხომალდის საბორტო სისტემებში, დე ვირიშალური როლი ითამაშა ქვესისტემებს შორის მონაცემების გაცვლაზე swidkost, გალვანური, კერუვანური კარების აკრეფისას და დიაგნოსტიკის დროს.
ფიზიკური რივენი
CAN-ავტობუსის ფიზიკური კავშირი არის "ინსტალაციის I" კავშირი მასთან დაკავშირებულ ერთეულებს შორის. დიფერენციალური სიგნალის ხაზებს უწოდებენ CAN_H და CAN_L და სტატიკური მდგომარეობაში არიან 2.5 ვოლტის პოტენციალის ქვეშ. 1 (რეცესიული ბიტი) მიუთითებს ავტობუსის ზომაზე, რომლის დროსაც CAN_H ხაზის სიმაღლე უფრო მაღალია, CAN_L ხაზი უფრო დაბალია. ჟურნალისთვის. 0 (დომინანტური ბიტი) CAN_H ხაზი ქვედა, CAN_L ქვედა. საბურავების ბანაკში ასეთი სასიამოვნო იყო: პასიური საბურავის ბანაკი vіdpovіdaє თანაბარი სხივი. 1 და უფრო აქტიურად - თანაბარი სხივი. 0. თუ შეტყობინებები არ გადაეცემა ავტობუსს, ისინი არ გადაირიცხება პასიურ სადგურზე. მეხსიერების ძალა ყოველთვის ემყარება დომინანტურ ცემას. ავტობუსის რობოტის ლოგიკა მიჰყვება „სადენიანი I“-ს: დომინანტური ბიტი „0“ თრგუნავს რეცესიულ ბიტს „1“ (ნახ. 12.1).
მალ. 12.1. Robot Logic CAN ავტობუსი
როდესაც FіZichnіyi Real_zatsії კონკრეტული პროექტი CAN-ისგან საჭიროა Givosti Schi Tu їїu Vuzlivіv-ის visnati-ს: de Rosetsovo Vony Majut, Yaki Sensors І VOKONAVCH MEHANIZMI SUCTED IN SYSTEM, єNTHOELROYATUENI, єNTHOELMOEKNIYNA. ერთი მავთულის ხაზი (სხვა დაფის საზღვრებთან ახლოს), ორმაგი მავთულის ხაზი, გრეხილი წყვილი ან ოპტიკურ-ბოჭკოვანი ხაზი შეიძლება გადატრიალდეს ექსპლუატაციის გონების დაცემაში. დიფერენციალური მეთოდით, სიგნალების ფორმირება ორმაგი მავთულის ხაზში საშუალებას გაძლევთ მნიშვნელოვნად გაზარდოთ სტაბილურობა ცვლაზე. CAN-მერეჟის განსხვავებული დიფერენციალური ძაბვით, ის აგრძელებს ფუნქციონირებას ზედა ხმოვან შუაში ან როდესაც სიგნალის ერთ-ერთი ხაზი გაპარსულია. ნავიტი მარტივი ტორსიული წყვილი დიფერენციალური CAN შეყვანით ეფექტურად ანეიტრალებს ხმაურს.
გადაცემის მაქსიმალური სიჩქარეა 1 მბ/წმ ავტობუსით 40 მ და დაახლოებით 40 კბ/წმ 1000 მ ავტობუსით.
სხვადასხვა CAN
ამ დროისთვის ხელმისაწვდომია სხვადასხვა დანამატი CAN-ინტერფეისით, როგორიცაა მონაცემთა გადაცემა ერთი წერტილიდან მეორეზე, რაც იძლევა პროცესის სინქრონიზაციისა და პრიორიტეტების სერვისის განხორციელების საშუალებას. CAN კონტროლერების უფრო ადრეულმა დანერგვაებმა მიიღეს ჩარჩოები 11-ბიტიანი იდენტიფიკატორით და მისამართებლობით 2048 წლამდე CAN V. 2.0A სპეციფიკაციის მხარდასაჭერად. ასეთ კონტროლერებს უწოდებენ Basic CAN და ხასიათდება ცენტრალური პროცესორის (CPU) ძლიერი ჩართულობით, კანის ნატეხები მეხსიერებაში ინახება და CPU გატეხილია და ამ ინფორმაციის საჭიროება არ არის (ნახ. 12.2). . ძირითადი CAN კონტროლერები ინახავს ერთ გადამცემ ბუფერს და ერთ ან ორ მიმღებ ბუფერს. შეტყობინებების გასაგზავნად ან წასაშლელად აუცილებელია CPU-ის გაგზავნა შეტყობინებების „გაგზავნა_გაგზავნილი“ და „უარყოფილი“ საშუალებით. კანის მდგომარეობის ხელახალი გამოკვლევის შედეგად CPA-ს ინტერესი უკვე დიდია, რაც ღონისძიების პროგრესირებასთან ერთად რეალურ ბრუნვის მაჩვენებელს შორისაა. აქედან გამომდინარე, მიზეზები ასეთი კონტროლერები vicorous CAN merezhy დაბალი გაცვლითი კურსი და / ან მცირე შეტყობინება.
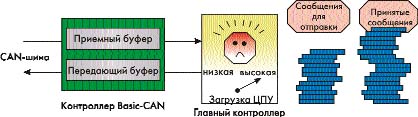
მალ. 12.2. ძირითადი CAN კონტროლერის სტრუქტურა
მეტი CAN-კონტროლერი, რომელიც დღეს გამოვიდა, მონაცემთა ჩარჩოების 29-ზე მეტი გაფართოებით, რაც საშუალებას გაძლევთ მიმართოთ 536 მილიონამდე შეტყობინებას. ასეთი კონტროლერები შეესაბამება CAN V. 2.0B (აქტიური) სპეციფიკაციებს და უწოდებენ Full-CAN კონტროლერებს. სუნი უზრუნველყოფილია ბუფერით დამატებითი მოვლისთვის, უფრო მეტიც, კანის მოვლა გამოიყენება თქვენი ნიღბის ტარებისთვის და საჭიროა ფილტრაცია ნიღბის იდენტიფიკატორის იდენტიფიკაციისთვის.
Full-CAN-ის შემთხვევაში CPU არის მაქსიმალურად განლაგებული, ოსცილატორები არ ამუშავებენ ზედმეტ ინფორმაციას (ნახ. 12.3). როდესაც თქვენ მიიღებთ გაფრთხილებას იდენტიფიკატორით, რომელიც განსხვავებულია, ის დაიმახსოვრდება ორპორტიანი OZP-ის სპეციალურ ზონაში და CPU შეწყდება. Full-CAN ასევე შეიძლება იყოს სპეციალური ტიპის შეტყობინებები, რადგან ეს ნიშნავს: "ვისაც ჰქონდა ეს ინფორმაცია, კეთილი იყოს, დაუყოვნებლივ გააგზავნე." Full-CAN კონტროლერი ავტომატურად უსმენს ყველა შეტყობინებას და აჭარბებს მიწოდებულ ინფორმაციას.

მალ. 12.3. სრული CAN კონტროლერის სტრუქტურა
ბოლო დრომდე, ინდუსტრიაში, ძირითადი CAN გაფართოებები 11-ბიტიანი იდენტიფიკატორით. ეს პროტოკოლი იძლევა მარტივ კომუნიკაციას მიკროკონტროლერებსა და პერიფერიულ მოწყობილობებს შორის მონაცემთა გაცვლის სიჩქარით 250 Kbps-მდე. თუმცა, უკიდურესად იაფი CAN კონტროლერებით, Full-CAN სადგური გახდა რეალობა ყველაზე პოპულარულ მოწყობილობებთან კომუნიკაციისთვის. მიუხედავად იმისა, რომ სამრეწველო დანამატები საჭიროებს მონაცემთა მაღალსიჩქარიან (1 მბ/წმ-მდე) გაცვლას, მაშინ არ არის აუცილებელი Full-CAN-ის გამოყენება.
საარბიტრაჟო კვანძები CAN-ავტობუსი
CAN-ს აქვს მრავალი უნიკალური ძალა, რომელიც შეიძლება გამოყენებულ იქნას სხვა საბურავებზე. CAN პროტოკოლში არის ოვერჰედის CAN-ავტობუსის გადაფარვა, რომლითაც მოცემულია მენეჯერის მისამართი, ეს გაფრთხილება ჩართულია. ტყავის ვუზოლი გამუდმებით „უყურებს“ ავტობუსს და აყენებს ლოკალურ ფილტრაციას მისაღებში, ვიკარიულ ბიტ ნიღბებსა და ვირიშუზე, როგორც ავტობუსის შეხსენება.
შედეგად, უმაღლესი საგანმანათლებლო დაწესებულება იღებს და ავსებს მხოლოდ იმ შეხსენებებს, რომლებიც თავისთავად აღიარებულია ახალზე.
კანის მოვლა შეიძლება იყოს მისი პრიორიტეტი, რომლის მნიშვნელობაც მოვლის იდენტიფიკატორში უნდა მოიძებნოს. გარდა ამისა, იდენტიფიკატორები გამარჯვებულები არიან შეტყობინების ტიპის იდენტიფიცირებისთვის. იდენტიფიკატორის ყველაზე ახალგაზრდა ნომრის ინფორმირება ყველაზე პრიორიტეტულია; უმაღლესი პრიორიტეტი შეიძლება მიენიჭოს იდენტიფიკატორს, რომელიც ემატება ნულამდე. შეტყობინებაზე ზედამხედველობა განპირობებულია იდენტიფიკატორის ავტობუსში შესწორებით. თუ ავტობუსზე წვდომა მოითხოვს გაფრთხილებას, გაფრთხილება გადაეცემა ავტობუსს, რომელსაც აქვს უმაღლესი პრიორიტეტი, ანუ უფრო დაბალი ID მნიშვნელობებით, მიუხედავად სხვა სიგნალებისა და ავტობუსის ხაზის ქარხნისა. შეტყობინებების გადაცემამდე მოწმდება კანის ვუზოლი, რომელი ვზუოლი მუშაობს უმაღლესი პრიორიტეტით. როგორც არის, ღვინო ტრიალებს პრიმახის ბანაკში და ცდილობს სხვა საათში გადმოსცეს გზავნილი. სიმძლავრის მნიშვნელობა შეიძლება განსაკუთრებით მნიშვნელოვანი იყოს რეალური საათის მართვის სისტემებისთვის, მაგრამ პრიორიტეტის მნიშვნელობა ჩვეულებრივ ენიჭება საათის საათს.
თუ A კვანძის გადაცემა ინიცირებულია B კვანძის მიერ, რომელიც არღვევს უფრო მაღალ პრიორიტეტს, მაშინ, როგორც კი ავტობუსი დარეკავს, ის დაირღვევა A კვანძზე შეტყობინების გადაცემის კიდევ ერთი მცდელობა. ეს პრინციპი, CSMA / CA: Carrier Sense Multiple Access / Collision Avidance ინფორმაციაზე წვდომა/კონფლიქტების პრევენცია). Ethernet ინტერფეისის ასეთი რეჟიმი არ აძლევს ავტობუსში არსებულ კონფლიქტურ კვანძებს ავტობუსთან კომუნიკაციის საშუალებას, მაგრამ ის დაუყოვნებლივ აჩვენებს ცვლილებას გაცვლის მოკლე დროში.
Otzhe, zavdyazhu არბიტრაჟის ავტობუსის შეტყობინება უმაღლესი პრიორიტეტით გადადის პირველზე, რაც უზრუნველყოფს სისტემის რეალურ დროში ფუნქციონირებას და ინფორმაციის სწრაფ გადაცემას. Rozpodіl prioritetіv mіzh raznymi ტიპის podomlen დგინდება საცალო ვაჭრობის მიერ ღონისძიების დიზაინის საათისთვის.
შეხსენების ფორმატი
შეწყალებაზე მიღებული შეტყობინების განმეორების პროცედურის თავიდან ასაცილებლად, კვანძებს შორის კომუნიკაციის ორი ტიპი არსებობს: ერთი კვანძი გადასცემს ინფორმაციას, მეორე კი ართმევს მას, ან A კვანძი სთხოვს B კვანძს მონაცემებს და ხსნის შეყვანას. .
მალ. 12.4. მონაცემთა ჩარჩო
მონაცემების გადასატანად ემსახურეთ მონაცემთა ჩარჩოს მონაცემთა ჩარჩო(სურ. 12.4), რომელიც შურისძიებას:
- იდენტიფიკატორი, რომელიც მიუთითებს დახმარების ტიპს („ძრავის_სიჩქარე“, „ტემპერატურა_ოლიї“) და ავტობუსზე წვდომის პრიორიტეტს. ბიტების რაოდენობის შესაცვლელად იდენტიფიკატორის ველი დაცულია სხვადასხვა ტიპის პროტოკოლისთვის: სტანდარტული CAN V2.0A ფორმატს აქვს 11-ბიტიანი იდენტიფიკატორი, ხოლო გაფართოებულ CAN V2.0B-ს აქვს 29-ბიტიანი იდენტიფიკატორი;
- მონაცემთა ველი, რომელიც უნდა იყოს შევსებული დამატებითი ინფორმაციით (ძრავის სიჩქარე = 6000 rpm, ზეთის ტემპერატურა = 110 ° C) რვა ბაიტამდე;
- ორი ბაიტი საკონტროლო ჯამი - ციკლური სიჭარბის შემოწმება (CRC)გადაცემის შეწყალების ჩვენების და გასწორების მიზნით.
CAN კვანძიდან ინფორმაციის გამოსათხოვად, დისტანციური ჩარჩო შეიძლება გამოყენებულ იქნას დისტანციური ჩარჩოდან მონაცემების მოთხოვნის მიზნით (ნახ. 12.5), რაც შეიძლება გაკეთდეს:
- იდენტიფიკატორი, რომელიც მიუთითებს მოთხოვნილი ინფორმაციის ტიპზე („ძრავის სიჩქარე“, „ზეთის_ტემპერატურა“) და განგაშის პრიორიტეტი;
- ორი ბაიტი საკონტროლო ჯამი CRC.
მალ. 12.5. დისტანციური ჩარჩოს მონაცემების ჩარჩო
ამ შემთხვევაში, იდენტიფიკატორს არ შეიძლება მოჰყვეს მონაცემები და მონაცემთა თარიღის კოდი არ შეიძლება პირდაპირ მიენიჭოს მონაცემთა ბაიტების რაოდენობას. Vuzol, რომელსაც სთხოვენ ინფორმაციის გადაცემას (ტემპერატურის სენსორი olії), გადასცემს მონაცემთა ჩარჩოს, რომელიც შურისძიებას მიიღებს საჭირო ინფორმაციისთვის. ამგვარად, თუ კვანძი A აგზავნის ჩარჩოს A კვანძში, რომელიც ითხოვს „ზეთის_ტემპერატურის“ იდენტიფიკატორს, მაშინ კვანძი B ითხოვს ტემპერატურის სენსორს და აგზავნის კვანძს A მონაცემთა ჩარჩოს „ზეთის_ტემპერატურის“ იდენტიფიკატორისა და საჭირო ინფორმაციის მისაღებად.
დამატებული ინფორმაცია, რომელიც მოთავსებულია ჩარჩოში, საშუალებას გაძლევთ აირჩიოთ ფორმატი და სინქრონიზაცია, შეტყობინების გადაცემის პროტოკოლი და ამანათის ტიპი:
- თუ არ გაიგზავნა - მოითხოვეთ მონაცემები, ან მონაცემთა წყაროში მიუთითეთ ბიტი გადაცემის დისტანციურ მოთხოვნაში (RTR 11-ბიტიანი იდენტიფიკატორისთვის და SRR 29-ბიტისთვის);
- მონაცემთა თარიღის კოდი, რომელიც უნდა დაიმახსოვროთ, რამდენი ბაიტი უნდა შეახსენოთ მონაცემებს; ყველა უნივერსიტეტი იღებს მონაცემთა ჩარჩოს, მაგრამ ისეთს, რომ ეს ინფორმაცია არ არის საჭირო, არ ინახავს;
- კადრის სინქრონიზაციისა და კონტროლის უზრუნველსაყოფად, წაშალეთ ველები კადრის ზედა ნაწილში.
- ავტობუსზე სინქრონიზაციის რეჟიმის შეყვანა დაყენებულია ჩარჩოს დასაწყისი ველის პირველი ბიტით;
- vikoristovuєtsya mekhanіzm bіtstafіngu - დამატებითი ბიტის ჩასმა მიმავალი ხუთი ნულით ან ერთით.
შეწყალების გამოვლინება
შეწყალების შესახებ სიგნალიზაცია იგზავნება შეწყალების ჩარჩოს შეცდომის ჩარჩოს გადაცემის საშუალებით. Vіn іnіtsіyuєtsya იყოს კვანძივით, თითქოს შეწყალების ჩვენება. CAN-კონტროლერები იყენებენ შეწყალების სტატისტიკური დამუშავების მეთოდს. ტყავის ვუზოლი შურისძიების მიზნით შეწყალების გადაცემის და მიღებისას გადაცემის შეცდომების მრიცხველის და მიღების შეცდომების მრიცხველის მიღებისას. როგორც გადამცემი ან მიმღები, ისინი აჩვენებენ შეწყალებას, იზრდება უფროსი ლიჩილნიკის მნიშვნელობა. თუ ლიჩილნიკის მნიშვნელობა გადადის ხაზებს შორის, ნაკადის გადაცემა წყდება. Vuzol ხედავს სიგნალს შეწყალების შესახებ, როგორიცაა შეცდომის ჩარჩო, დეინსტალირებს შეწყალების აქტიურ დომინანტურ ნიშანს დიდი ხნის განმავლობაში 6 ბიტით. იმ ვუზოლის შემდეგ, რომლის გადაცემაც შეწყდა, მე ვიმეორებ შეტყობინებას. Nenadiynym ან ხშირად poshkodzhenim უმაღლეს სასწავლებლებს შეიძლება მიეცეს პასიური რეცესიული ნიშანი შეწყალების.
CAN-ს აქვს სხვადასხვა სახის შეწყალება. მათგან სამი რჩევაა თანაბარი მნიშვნელობით:
- CRC შეცდომა - საკონტროლო ჯამის შეწყალება (თუ მიღებული CRC ველი და გამოთვლილი საკონტროლო ჯამები განსხვავებულია).
- Form Error - ბოდიში კადრის ფორმატისთვის მიღებული CAN ფორმატის კონვერტაციის შეუსაბამობის შემთხვევაში.
- აღიარების შეცდომა - შეწყალება შეტყობინების მიღების დასადასტურებლად, თითქოს თქვენ ჩამოხვედით კვანძიდან შეტყობინების სწორი დადასტურების დადასტურების გარეშე.
გარდა ამისა, არსებობს ორი სახის შეწყალება ცოტა დონეზე:
- Bit Error - აღმოჩენილი კვანძებს შორის განაწილების აქტიური კვანძის მიერ, ჩვენ მას გამოვგზავნით ავტობუსში, რომელიც ტოლია კვანძის მიერ თვითკონტროლის მექანიზმის განხორციელების სიჩქარის რეალურ მნიშვნელობებს.
- პერსონალის შეცდომა - შემთხვევა ექვსი მომავალი ბიტის შეტყობინების ველში 0 ან 1-ის შემდეგ (ბოდიში ბიტსტაფინგი).
Zavdyaki tsim mekhanіzmam vyyavlennya რომ შეწყალების კორექტირება ymovіrnіst შეწყალების გამოტოვება ძალიან მცირეა. მაგალითად, 500 კბ/წმ სიჩქარით, ავტობუსის დაფარვით 25%, ხოლო 2000 წლის განმავლობაში, 1000 წლის განმავლობაში მხოლოდ ერთი შეწყალება არ დაფიქსირებულა. გარდა ამისა, შეუძლებელია საბურავის დაბლოკვა რობოტული სისტემის არასწორი კვანძით. ასეთი კვანძები ნაჩვენებია და უკავშირდება ავტობუსის ბირჟას.
მესამე მხარის დანართების დასაკავშირებლად საჭიროა სპეციალური გადამყვანები ( can-bus ადაპტერები), რომელიც საშუალებას გაძლევთ დააყენოთ ყველა ფუნქცია და განახორციელოთ უპირატესობები საბორტო სისტემამანქანა.
Can-bus ადაპტერიჩართულია ციფრული მონიტორის (Pioneer, Rockford, BOSE, KIA, JBL) გაშვებით, აკონტროლებს სიგნალს უკანა ხედვის კამერის გასააქტიურებლად, პარკირების სისტემიდან ინფორმაციის საშუალებით, ჩართულია სამგზავრო კომპიუტერით და საშუალებას გაძლევთ აჩვენოთ ყველა ინფორმაცია. მულტიმედია ეკრანზე, რადიო სიხშირე , შექმნილი) ტრეკები).
მანქანის ხედი can-bus ადაპტერებიდაამარცხა სხვადასხვა ფუნქციები.
ტოიოტას მანქანებისთვის, ზოგიერთ შემთხვევაში, არის ადაპტერი იოგასთვის სრულ განაკვეთზე მუშაობისთვის რადიო მაგნიტოფონით. ადაპტერი საშუალებას გაძლევთ შეცვალოთ მანქანის "ხმის წრე" - დაარეგულიროთ ხმის ხმა წინა და უკანა დინამიკებს შორის, მანქანის მარცხენა და მარჯვენა მხარეს, ასევე თავად მძღოლის ხმას. დაკეცილი და თავთავიანი გაფართოებების უმეტესობისთვის, რომლებიც იყიდება, ეს ფუნქცია არ არის გადაცემული.
განსაკუთრებით ვარტო მნიშვნელოვანია can-bus ადაპტერიამისთვის KIA Sorento და KIA Sportage, რომლებშიც დამონტაჟებულია ციფრული გადამრთველი. ამ დროს, ციფრული საათის ხმის გადაცემა ირთვება, იქნება ის მიმართული, ხმაური თუ ცვლილება.
უნდა მოვემზადოთ მანამ, სანამ რადიოები, რომლებსაც არ აქვთ გადამყვანები ციფრული გადამრთველით სამუშაოდ, უშუალოდ დინამიკებთან დაუკავშირდებიან. ასეთი კავშირის სქემისთვის თქვენ ხარჯავთ ამაღლებულს და ამავდროულად, მკაფიო ხმის იმედს. სწორი ინსტალაციის ერთადერთი გარანტია შეიძლება იყოს can-bus ადაპტერი, რომელიც დამონტაჟდება მანქანაში ციფრული გამოწერისთვის.
Volkswagen/Skoda მანქანებისთვისაქსესუარის ჩართვის სიგნალი (ACC), კერმის კონტროლის ღილაკები, დადუმება და სხვა სიგნალები გადაიცემა მეშვეობით შეუძლია საბურავიმანქანა. სწორი გამოყენების გარეშე can-bus ადაპტერიაუცილებელია სერიოზულად ჩაერიოს მანქანის სალონში, ვრახოვუუჩი ასეთი შეჭრის ყველა კვალი. ასევე, მანქანაში არსებული maxidot-ის ეკრანზე შეიძლება გამოჩნდეს რადიოსადგურის ნომერი და სხვა ინფორმაცია რადიოს სადგურის შესახებ.
მაზდას მანქანებისთვის can-bus ადაპტერიჩამრთველის დასაკავშირებლად და სწორად ფუნქციონირებისთვის საჭირო კომპიუტერის მუშაობა და ამუშავება და ნავიტი. სათავე დანადგარის გამოცვლისა და ადაპტერის დაყენებისას INFO ღილაკი გადადის კერმოზე, ასე რომ თქვენ შეგიძლიათ აკონტროლოთ მუშაობა კომფორტული მაგნიტოთი. უფრო მეტიც, Mazda 3-ის ზოგიერთ ვერსიაში (არაბული, ჩინური, ბრაზილიური შერჩევა), მოგზაურობის კომპიუტერიდან მონაცემების ჩვენების ფუნქცია არ არის გადაცემული, რადიოს დაყენება. can-bus ადაპტერითქვენ აიღებთ თქვენი მანქანის ახალ ფუნქციებს - სამგზავრო კომპიუტერს (შუა და მიტევა ვიტრატა პალივა, დენის რეზერვი, საშუალო სიჩქარე თხელია). ამ გზით თქვენ არა მხოლოდ წაართმევთ კარგ ხმას, ნავიგაციას, არამედ გააფართოვებთ თქვენი მანქანის ფუნქციონირებას.
ავტობუსის ადაპტერი Mitsubishi მანქანებისთვის (Pajero, Outlander XL, ASX, LancerX)გამორთავს რადიოს როკფორდის ციფრულ გადამრთველთან დაკავშირების ფუნქციას.
Rockford Fosgate ციფრულ აბონენტებს, რომლებიც აღჭურვილია Mitsubishi მანქანებით, შეიძლება ჰქონდეს შემდეგი ფუნქციონირება:
ხუთსაფეხურიანი საბვუფერის კონტროლი
ხმის ბალანსის რეგულირება: წინა-ჩაისფერი, მარცხნივ-მარჯვნივ
podsiluvach-ის დაყენება MUTE რეჟიმში
Vymknennya pidsilyuvacha, თუ არ მოიგეთ.
ჩვეულებრივი რადიო მაგნიტოფონის ყიდვისას შეცვალეთ აზრი, რომ დაინსტალირების შემდეგ არ დაკარგოთ დანარჩენი ფუნქციონირება. Be-yaké საფუძვლიანად მანქანაში შეიძლება გაუმჯობესდეს იოგა, და არა ნავპაკი. იგივე can-bus ადაპტერების გამოყენება საშუალებას მოგცემთ არა მხოლოდ სწორად დააინსტალიროთ რადიო, არამედ გააფართოვოთ მანქანის ფუნქციონირება.
დღევანდელ მანქანებამდე წარმოდგენილია ყველა დიდი სიმაღლე. Vymogi მგზავრობის უსაფრთხოებისთვის, კომფორტი ერთი საათის განმავლობაში მგზავრობისას, გარემოს უსაფრთხოება და ეკონომიკა მუდმივად იზრდება.
ახალი ტექნიკური დისტრიბუცია სულ უფრო და უფრო სწრაფი ხდება, ხოლო საცალო მოვაჭრეების რაოდენობა სულ უფრო და უფრო ამბიციური ხდება. Tse i є პროგრესი და Tse კარგი. პროგრესი mi vdyachnі ტაკის ღვინოებისთვის, როგორიცაა, მაგალითად, ABS, აირბაგი, povnistyu ავტომატურად დაინსტალირებულიცალი კლიმატი; აპლიკაციების მხოლოდ მცირე ნაწილი დიდი რაოდენობით ტექნიკური ინოვაციებიდან, ისევე როგორც დანარჩენი ათწლეულის განმავლობაში, განხორციელდა მანქანის დიზაინში.
Zavdyaki tsyomu განვითარების zrostaє ელექტრონული სისტემების ნაწილი. დღევანდელ მანქანებში, მანქანის აღჭურვილობის კლასიდან გამომდინარე, ის დამონტაჟებულია 25-დან 60-მდე ელექტრონულ სისტემაში, რომლებიც შეიძლება დაკავშირებული იყოს გამტარ ზარით.
ტიპურ დირიჟორებში გამტარები, ვარდების კაბელები და გარე ბლოკები მცირე ზომის იყო, რის შედეგადაც წარმოების პროცესები უფრო ძვირი ღირდა. პრობლემების არსებობის გარეშე, მათ შეიძლებოდა დაებრალებინათ ერთსაათიანი დიაგნოსტიკა, რათა გამოეკვლიათ ასეთი მანქანების ხარვეზები. მექანიკოსებისთვის დაიწყო შეუთავსებლობის ჯიუტი და დიდი ხნის განცდა, რისთვისაც კლიენტმა ძვირად გადაიხადა. ფულის გაცვლა სხვადასხვა კრიტიკულ შენობებს შორის ასეთი ტექნოლოგიისთვის ასევე იცავს შესაძლებლობის საზღვრებს.
CAN ავტობუსის ისტორია
სწორედ ამიტომ, 1983 წელს საავტომობილო ინდუსტრიამ გამოაცხადა ასეთი საკომუნიკაციო სისტემის საჭიროება, რათა მას შეეძლო დაეკავშირებინა საჭირო დანართები ერთმანეთთან ერთი ხაზით, რაც უზრუნველყოფდა ფულის აუცილებელ გაცვლას. სისტემა დამნაშავეა, რომ კმაყოფილდება შემდეგი:
- დაბალი ცვალებადობა სერიულ წარმოებაში
- Pratsyuvati-ის აშენება რეალურ დროში shvidkodі-სთვის
- მაღალი ქედმაღლობა
- ელექტრომაგნიტური ბარიერებისგან დაცვის მაღალი დონე
მონაცემთა გაცვლის ყველაზე ფართო სისტემა - CAN-bus
- 1983 COB CAN (Bosch)
- 1985 თანამშრომლობა Intel-თან ჩიპების განვითარებისთვის
- 1988 წელს Intel-ის CAN-ის პირველმა სერიულმა ტიპმა დაიწყო CAN-ის აქცია ვინტაჟური მანქანებისთვის.
- 1991 პირველი zastosuvannya CAN in სერიული მანქანა(S-კლასი)
- 1994 CAN-ის საერთაშორისო სტანდარტი (ISO 11898) დაწინაურებულია
- 1997 პირველი გამარჯვებული CAN სალონში (S-კლასი)
- 2001 CAN მხარდაჭერა მცირე ზომის მანქანებში (Opel Corsa) დრაივში და კორპუსში
რას ნიშნავს CAN?
CAN ნიშნავს Controller Area Network-ს
CAN-BUS მონაცემთა გადაცემის განაკვეთები
- მონაცემთა გაცვლა საჭიროა ყველა პირდაპირ ხაზზე kilkom-სა და ელექტრო შენობებს შორის
- სენსორულ სენსორებში მრავალ ფენიანი გადამრთველის სიგნალის შესაძლებლობა
- მონაცემთა გადაცემის მაღალი სიჩქარის თაღი
- დაბალი vіdsotok სხვადასხვა სახისმონაცემთა გადაცემის კონტროლი
- შესაძლებლობების გასაფართოვებლად, დარეკეთ საკმარისი იმისათვის, რომ შეიტანოთ ცვლილებები პროგრამული უზრუნველყოფის უსაფრთხოებაში
- CAN სისტემა სტანდარტიზებულია მთელ მსოფლიოში, რაც ნიშნავს, რომ შესაძლებელია მონაცემთა გაცვლა სხვადასხვა მწარმოებლის შესაბამის მოწყობილობებს შორის.
რა არის CAN-BUS?
CAN ავტობუსის მონაცემთა გადაცემის სისტემა შეიძლება გამოყენებულ იქნას შემდეგ ავტობუსში. ასეა, როგორც შეხვედრების ავტობუსი მდიდარი მგზავრების გადასაყვანად
CAN-bus სისტემა გადასცემს უამრავ ინფორმაციას. CAN-ავტობუსის სისტემის გარეშე, მთელი ინფორმაცია უნდა გადაეცეს საკონტროლო მოწყობილობებს, ჩატარების დღეების დიდი რაოდენობით. Tse ნიშნავს, რომ შეიძლება იყოს მხოლოდ ერთი არხი კანის ინფორმაციისთვის.
CAN-ავტობუსის მონაცემების დამატებითი გადაცემისთვის, შენობების მენეჯერების რაოდენობა შესამჩნევად იცვლება. ყველა ინფორმაციის გაცვლა გარე შენობებს შორის, რომლებიც უნდა კონტროლდებოდეს, ხორციელდება მაქსიმუმ ორი გამტარის მეშვეობით. მანქანის შენობის დერეფანში გამოიყენება სხვადასხვა ტექნოლოგიები (მერეჟი). მოდით მოკლედ მიმოვიხილოთ ზოგიერთი მათგანის მახასიათებლები.
სქემა "ზირკა"
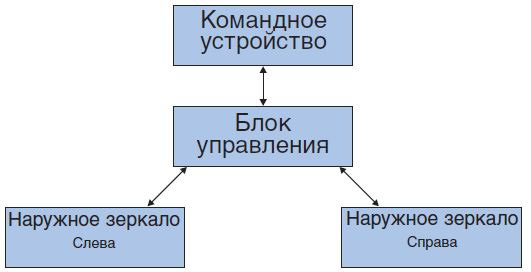
- "ნაპერწკლის" სქემის მიღმა, მონაცემთა გაცვლის ყველა ელემენტი ციმციმდება ერთი ცენტრის მიერ (საკონტროლო განყოფილება)
- თუ მოვლის ბლოკი უწესრიგოა, მაშინ ის იშლება
სქემა "kіltse"
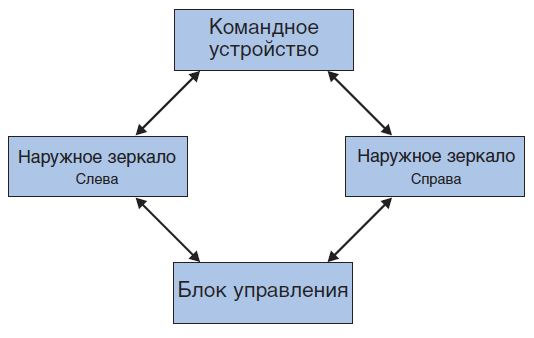
- "კილცეს" სქემის მიღმა, ყველა ელემენტი გაცვლის ხარკით თვითკმარობისთვის.
- A დანართიდან დანართში გადასასვლელად ინფორმაცია უნდა გაიაროს კიდევ ერთი დანართი.
- თუ ერთი დანართი უწესრიგოა, მაშინ სისტემა უწესრიგოდ ირღვევა.
- მონაცემების განახლება მარტივია, მაგრამ ვისთვისაც საჭიროა მუშაობისთვის დრო.
ხაზოვანი დიაგრამა
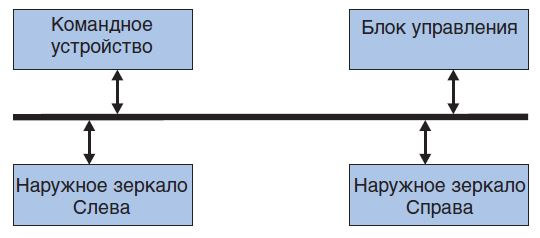
- გადამცემი სიგნალი ვრცელდება ხაზის გასწვრივ ორივე მიმართულებით.
- როგორც ერთი დანართი, რომ გაცვალოთ, თორემ აგრძელებენ მონაცემთა გაცვლას ერთმანეთში.
ფულის გაცვლის სისტემის მიმაგრება
ხაზოვანი სქემა ყველაზე ხშირად გვხვდება მანქანებში;
- მერეჟევი ვუზოლი: შეიყვანეთ მიკროკონტროლერი, CAN კონტროლერი და ავტობუსის დრაივერი ახლის წინ.
- მიკროკონტროლერი: დავალებები CAN კონტროლერის მიერ უწყვეტი დამუშავებისთვის და გადაცემული და მიღებული მონაცემების დამუშავებისთვის.
- CAN კონტროლერი: დავალებები უსაფრთხო გადაცემის და მიღების რეჟიმებისთვის.
- ავტობუსის მძღოლი: იზრუნეთ გადაცემის დროს, ასევე მიღებაზე.
- დარეკეთ არხზე: მეორადი გამტარი (ორივე ტიპის სიგნალისთვის: CAN-High და CAN-Low). ელექტრომაგნიტური დამცავი გამტარების შეცვლისთვის.
- ნამისტის ჯემპერი: 120 ვ ძაბვის რეზისტორი, რათა თავიდან აიცილოს ექო სიგნალი გამტარის ბოლოებზე და მიიღოს ექო სიგნალი.
როგორ ვარჯიშობთ ნამისტაზე?
CAN-ავტობუსების დახმარებისთვის მონაცემთა გადაცემა ექვემდებარება სატელეფონო კონფერენციის პრინციპს. მონაწილე (საკონტროლო განყოფილება) "უსმენს" თავის ინფორმაციას (მონაცემებს) გადამცემ ხაზს, ხოლო სხვა მონაწილეები "უსმენენ" ამ ინფორმაციას. deyakі მონაწილეებმა იციან tsyu іnformatsiyu tsіkavoyu її її. სხვები უბრალოდ უგულებელყოფენ მას.
მანქანა იწყებს ნგრევას, მაგრამ წყლის მხარეს კარები არ არის შეკეთებული. იმისთვის, რომ წყალს გაუსწრო, საკონტროლო მოდულს ორი ინფორმაცია სჭირდება:
- მანქანა იშლება.
- კარები წყლის მხარეს vіdchinenі.
ინფორმაცია მიიღება კარის საკონტაქტო სენსორით / , და ის გარდაიქმნება ელექტრულ სიგნალად. ეს ელექტრული სიგნალები ხელახლა კეთდება, ახლა ისინი ციფრული ინფორმაციაა და ორი კოდიანი კოდის დანახვისას ისინი იგზავნება მონაცემთა გადაცემის არხით, სანამ არ მიაღწევენ პირველად დანართს. რაც შეეხება სიგნალს კოლიების შეფუთვაზე, ეს სიგნალი ასევე აუცილებელია სხვა კრიტიკული შენობებისათვის, მაგალითად, დამცავი შენობებისთვის. ეს ასევე უნდა იყოს სხვა სატრანსპორტო საშუალებებზე, რომლებიც აღჭურვილია გაშვებული მექანიზმის აქტიური მოძრავი სისტემით. გზაზე მანქანის პოზიციის ოპტიმიზაციის მიზნით იცვლება მიწის კლირენსი. ყველა ინფორმაცია უნდა გაიაროს მონაცემთა ავტობუსში და შეიძლება გაანალიზდეს კანის მონაწილემ.
CAN-bus მონაცემთა გადაცემის სისტემა - მულტი-მასტერ სისტემა - მრავალჯერადი წვდომის სისტემა, რაც მეტს ნიშნავს:
- უსმერეჟივ ვუზლი (კერიუჩი დანართები) ტოლია.
- თუმცა ყველა სუნს შეიძლება ჰქონდეს წვდომა სისტემის მენეჯერთან, პრობლემების აღმოფხვრაზე და ბრძანებების კონტროლზე.
- ტყავის მაქმანის კვანძი შეიძლება იყოს დამოუკიდებელი და დამოუკიდებელი სხვა ჰალსტუხის კვანძის დახმარების გარეშე გადამცემ არხზე წვდომის მისაღებად.
- yakscho vіdmovlyaє ერთი merezhevy vuzol, tse vyklykaє vyhodu z fret ყველა სისტემა zagalom.
მრავალჯერადი წვდომის სისტემაში გადაცემაზე წვდომა უკონტროლოა, ამიტომ სანამ ამ მონაცემების გადაცემის არხი დახურულია, ახალზე წვდომა შეზღუდულია.
ბევრი მერეჟური კვანძი. იაკბი, აღმოჩნდა, რომ ყველა ინფორმაცია ერთდროულად გამოგვიგზავნეს, შემდეგ კი ქაოსი დაიწყო
მას შეეძლო ხარკი მოეტანა "Zitknennya". ოტჟე, მიჰყევი ბრძანებას. ამიტომ, CAN-bus სისტემაში არის მკაფიო იერარქია - ვის შეუძლია გაუგზავნოს თავისი ინფორმაცია პირველს და ვის შეუძლია შეამოწმოს. მერეჟნიული კვანძების დაპროგრამებისას მითითებული იყო სიშავე, წყნარი და სხვა მონაცემების მნიშვნელობის გამო. Zgіdno z chergoyu, danny z bіsh vysokoy პრიორიტეტული უფლება є პირველი dannyh z ქვედა პრიორიტეტის უფლებასთან დაკავშირებით. თუ შერწყმის კვანძიდან მონაცემების სიძლიერე მაღალი პრიორიტეტია, მაშინ სხვა შერწყმის კვანძები ავტომატურად არიან.
როგორია CAN-ავტობუსის სისტემის იერარქია (გადაცემის ლოგიკა)?
კონდახი:
გაფრთხილება, თუ გჭირდებათ წასვლა კერიუჩის გარე შენობაში, რომელიც პასუხისმგებელია ტექნიკურ უსაფრთხოებაზე, მაგალითად, ABS მართვის განყოფილებიდან, zavzhdi.
დგუშებს უფრო მეტი პრიორიტეტი ექნებათ ამძრავის მართვის ერთეულის დასახმარებლად.
CAN სისტემას აქვს განსხვავება დომინანტურ და რეცესიულ გადაცემის დონეებს შორის. რეცესიულ რივენს აქვს მნიშვნელობა 1, ხოლო დომინანტი
უდრის 0-ს. ახლა, მაშინაც კი, თუ ბევრი საკონტროლო ბლოკი ერთდროულად აიძულებს დომინანტური და რეცესიული ტოლის გადაცემას, მაშინ
დომინანტური ეკვატის მქონე მღვდელმსახურს შეიძლება ჰქონდეს უფლება გამოგვიგზავნოს თავისი მესიჯი.
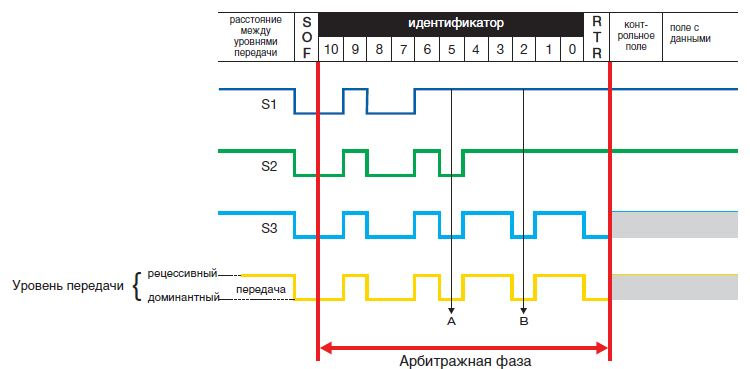
ამ მაგალითზე შეგიძლიათ კიდევ ერთხელ ახსნათ მონაცემთა გადაცემის ხელმისაწვდომობა. ამ ეტაპზე, სამი merezhnі vuzli სურს გადარიცხოს სისტემის მეშვეობით მათი მონაცემები. საარბიტრაჟო შეფასების პროცესის საათში - დაღუპვის არჩევა - საკონტროლო განყოფილება S1 წყვეტს მის გადაცემის ტესტს A წერტილში, ასევე რეცესიული ხაზი ხდება სხვა საკვანძო მოწყობილობების S2 და S3 დომინანტური ხაზი.
Keruyuchiy pristry S2 შეწყვეტს თქვენს გადაცემის ტესტს ამ მიზეზების მე-3 პუნქტში, რომელიც ადრე იყო მითითებული. ამ რანგში პირველობას S3 წაართმევს, ახლა შეგიძლიათ თქვენი გზავნილის გადმოცემა.
რა არის მონაცემთა პროტოკოლი?
მონაცემთა გადაცემა ექვემდებარება მონაცემთა პროტოკოლს თუნდაც მოკლე დროში. პროტოკოლი შედგება ინფორმაციის დიდი რაოდენობის ბიტისაგან, რომლებიც განთავსებულია იმავე თანმიმდევრობით. მონაცემთა ველის მნიშვნელობად შესატანი ბიტების რაოდენობა. ბიტი არის ინფორმაციის უმცირესი ერთეული, ყველაზე მეტი ბიტი უდრის ბაიტს = შეტყობინებას. ეს შეტყობინება შეიძლება იყოს ციფრული ფორმით და შეიძლება გამოიხატოს როგორც 0 ან 1.
CAN ავტობუსის მონაცემების გადატანა სამგზავრო მანქანაზე
ჩვენს დღეებში, დღევანდელ მანქანებში, არის 2 CAN-ავტობუსის სისტემა:
მონაცემთა სწრაფი გადაცემა – მაღალი=სიჩქარიანი ავტობუსი (ISO 11898)
- SAE CAN კლასი C.
- მონაცემთა გადაცემა 125 კბ/წმ - 1 მბ/წმ.
- გადაცემის მანძილი 40 მეტრამდე 1 Mbps სიჩქარით.
- გამომავალი ნაკადის გადაცემა > 25 mA.
- დაბალი spozhivannya struma.
- 30-მდე mesh კვანძი.
Zavdyaki ფლობს მონაცემთა გადაცემის მაღალ სიჩქარეს (კრიტიკული ინფორმაციის გადაცემა რეალურ დროში მილიწამში), ავტობუსის სისტემა
ვიცოდი zastosuvannya დისკის აგრეგატებში, de povyazanі mіzh თავად ერთ merezh ბლოკებში keruvannya dvigun, გადაცემათა კოლოფი, გაშვებული მექანიზმი და galms.
დაბალი სიჩქარით მონაცემთა გადაცემა დაბალი სიჩქარით ავტობუსი (ISO 11519-2)
- SAE CAN კლასი ხელოვნება.
- მონაცემთა გადაცემა 10 Kb/s – 125 Kb/s.
- გადაცემის მაქსიმალური დრო
- შაბათ-კვირის ნაკადი< 1 мА.
- სისტემა st_yka მოკლე zamikannya.
- დაბალი spozhivannya struma.
- 32-მდე mesh კვანძი.
Tsya სისტემა იცოდეს მისი zastosuvannya სალონში, de povyazanі mіzh თავად ბორტ ელექტრონიკის კორპუსის ელექტრონული კომპონენტების კომპონენტების ერთი ზომით,
scho vіdpovіdaє კომფორტისთვის.
CAN-BUS სისტემის დიაგნოსტიკა
CAN ავტობუსის სისტემის შესაძლო გაუმართაობა:
- გამტარების გაპარსვა.
- მასაზე მბჟუტავი.
- ბატარეის ციმციმი
- მბჟუტავი CAN-მაღალი / CAN-დაბალი.
- ბატარეის დაბალი ძაბვის გადაჭარბება / ბატარეის განმუხტვა.
- რეზისტორული მხტუნავების არსებობა.
- ძაბვის ნახტომი, მაგალითად, კოჭა არ მუშაობს გამართულად, რაც სიგნალს უწოდებს.
Დიაგნოსტიკა:
- სისტემის მუშაობის უგულებელყოფა.
- მოკითხულია ხარვეზების ბანკი.
- გაეცანით სამყაროს მახასიათებლებს ცვლილებებს.
- გაგზავნეთ სიგნალი ოსილოსკოპის ეკრანზე.
- გადალახეთ სასაზღვრო წნევა.
- vimirati opir-ის დირიჟორები.
- vimirati opіr resistor jumpers.
მოძებნეთ გაუმართაობის მიზეზები
კობამდე ვიკითხავ გაუმართაობის მიზეზს, აუცილებელია ამ მანქანისთვის დამატებითი დანართები არ იყოს, რაც შეიძლება
გადამცემი სისტემიდან გადამცემი სისტემის ინფორმაციაზე წვდომისათვის. შესაძლოა, საბოლოოდ її სისტემაში შეღწევა განადგურდა. გადაცემის სისტემაში გაუმართაობის ძიების შესაძლებლობა მდიდარი ჩინოვნიკების ხელში. Virishalnym არის ისეთები, როგორიცაა ვირობნიკის დაჭერის უნარი. თქვენ ასევე შეგიძლიათ მოძებნოთ ხარვეზები დამატებითი აქსესუარებისთვის დიაგნოსტიკისთვის, თუ თქვენს შეკვეთას აქვს შესაბამისი მოწყობილობა, წინააღმდეგ შემთხვევაში შეგიძლიათ შეკვეთაში გქონდეთ ტესტერი და ოსცილოსკოპი. ასევე ძალიან მნიშვნელოვანია დედებისთვის სპეციალური მონაცემების შეკვეთა მანქანისთვის (ელექტრული სქემები, ანგარიშის აღწერამონაცემთა გადაცემის სისტემები და ა.შ.)
დროა ეძებოთ ხარვეზი, ერთი და იგივე ტესტერის ან ოსცილოსკოპის დახმარებით, აუცილებელია ოპერაციებზე მუშაობა, სტრუქტურული გონების დამარცხება. ცე ნიშნავს, რომ უსამართლობის ლოკალიზება შესაძლებელია, ვთქვათ, "დაწინაურებული", რათა რობოტში სცადო, რომ ზედმეტი ვიმირით შორს დასახლდე. იმისათვის, რომ უკეთ შეძლოთ საკუთარი თავის წარმოჩენა, ჩვენ მაგალითს ვიღებთ კონკრეტულ მანქანას გაუმართაობის საძიებლად. ჩვენს ვიპადკას ექნება (სხეული W210).
ასეთი უსამართლობის შესახებ გამოცხადდა:
მგზავრის მხრიდან სკლოპიდომნიკი არ მუშაობს.
პრაქტიკის მონაცემების ხელახლა შემოწმება:
1. შეგიძლიათ სკლოპიდომნიკში ერთი თვის წყალში მოხვედრა?
ამ ეტაპზე დახურულია გარე შენობები, სამუშაო სადგურზე განთავსებულია CAN-ავტობუსის სისტემის გამტარები და ნაძირალას ელექტროძრავა. არასწორი pogaє, ymovіrno, სართულზე vimikacha sklopidyomnika მგზავრის მხრიდან.
შეგიძლიათ დააჩქაროთ სხვა ფუნქციებით (მაგალითად, სარკის პოზიციის შეცვლა)?
სხვა ფუნქციებით სარგებლობისთვის აუცილებელია ჩამკეტი მოწყობილობა ღია და CAN-ავტობუსის სისტემა სამუშაო სადგურზე. უნარიანი მიზეზითგაუმართაობა - მწკრივის ძრავის ავარია წყლის მხრიდან ან სკვილერის ელექტროძრავის ავარია მგზავრის მხრიდან. შესაძლებელია ამოცნობა, თითქოს ამ ფუნქციის შეცვლა მგზავრის სავარძლიდან. თუ ნაძირალა მუშაობს, მაშინ ელექტროძრავა შეიძლება გამორთოთ. უზუსტობების მოსაძებნად აუცილებელია ვიმიკაჩი წყლის მხრიდან შევხედოთ.
მიუხედავად იმისა, რომ მგზავრის მხრიდან წყლის ექსპლუატაციაში შეყვანა შეუძლებელია, სავსებით შესაძლებელია, რომ გაუმართაობის მიზეზი იყოს CAN-ავტობუსის სისტემის გაუმართაობა ან შენობის გაუმართაობა.
ოსილოსკოპის სწორი და არასწორი გამოსახულების გასწორება


ოსილოსკოპის CAN ავტობუსის სისტემასთან დასაკავშირებლად, თქვენ უნდა იცოდეთ კავშირის საჭირო სივრცე. როგორც წესი, ვარდისფერზე უნდა ვიცოდეთ დანამატს, რომელიც მართავს და CAN-bus მონაცემთა გადამზიდველს შორის. ჩვენს კონდახთან, მგზავრის მხარეს, საკაბელო არხთან, არხის ზოლის ქვეშ (გაოცებული პატარებით), არის პოტენციური დისტრიბუტორი.

აქ, CAN-ავტობუსის okremі დირიჟორები keruyuchih outbuildings-დან ერთბაშად იყრიან თავს. თქვენ შეგიძლიათ ოსცილოსკოპი უპრობლემოდ დაუკავშიროთ პოტენციურ დისტრიბუტორს.

თუ დაკავშირებული ოსცილოსკოპი ვერ აღმოაჩენს სწორ სიგნალს, მაშინ CAN ავტობუსის მონაცემთა გადაცემა წყდება. იმის აღსანიშნავად, რომელ ადგილას არის უსამართლობა, ახლა უნდა ნახოთ ვარდები. როცა საჭიროა ოსცილოსკოპის ჩვენების შემოწმება. როგორც კი სიგნალი გამოჩნდება ოსილოსკოპის ეკრანზე, CAN-ავტოსის სისტემა კვლავ მუშაობს. ხარვეზს საყვედურობს სისტემა, რომელსაც აქვს შტეფსელი. თეფშზე ვარდებზე ადრე ვარდების დადებაა საჭირო. შემდეგი ნაბიჯი არის მოტყუება იმაში, რომ მე დავნიშნავ, რომელსაც მე თვითონ ავაშენებ ვარდების დასადებლად, რომელიც მიყვანილია გაუმართავი სისტემაში. აქ ცოცხალი მონაცემების ვირობნიკი არ არის მიმართული.
იმისათვის, რომ ძიება და მუშაობა უფრო ეფექტური გახდეს, აუცილებელია ტესტირების ახალი მეთოდის გამოყენება, რადგან თავად სისტემა ვერ პრაქტიკაში გამოიყენება. მანქანის სხვა მონაცემების მახასიათებლების აშკარად, ელექტრული ინსტალაციისა და ოთხი საკონტროლო განყოფილების განლაგების შესახებ, გაუმართავი სისტემის იდენტიფიცირება შესაძლებელია ყოველგვარი სირთულის გარეშე. CAN-ავტობუსის სოკეტების დენის წყაროსთან დაკავშირებით და სოკეტების პოტენციალის ბუდესთან შეერთებით შეგიძლიათ დაადგინოთ რა არის საკაბელო სადგურის ან ელექტრომომარაგების გაუმართაობის მიზეზი. მიუხედავად იმისა, რომ სიგნალების ამოცნობა შესაძლებელია ოსცილოსკოპზე, CAN-ავტობუსის სისტემა შეიძლება მოიძებნოს სამუშაო სადგურში და საკაბელო სადგური ასევე გვხვდება სამუშაო სადგურში. ოსცილოსკოპზე სიგნალების ამოცნობა შეუძლებელია, გაუმართაობის მიზეზი სწორედ ელექტრული დანართის გაუმართაობაა. თუ დადგინდა საკაბელო ინსტალაციის უკმარისობის ფაქტი, მაშინ, ვიმირიიუჩი ოპირ და ძაბვა, შესაძლებელია დადგინდეს ციმციმი მასაზე ან პლიუსზე, ან ციმციმი სადენებს შორის.

მანქანებში, რომლებსაც არ აქვთ პოტენციური rozpodіlnik, უზუსტობების ძიება მნიშვნელოვნად დიდ სუსილს ნიშნავს. ოსილოსკოპი დაკავშირებულია CAN-ავტობუსების სადენებთან შესაბამისი უბნისთვის (მაგალითად, ვარდისფერი ზომის საკონტროლო ერთეულზე). მაშინ ჩვენ დაგვჭირდება, თქვენი ცოდნის მიხედვით, ყველა დანართი, რომელიც უნდა კონტროლდებოდეს, და CAN ავტობუსის ვარდები, რათა იმუშაოს საკონტროლო ბლოკებიდან შეუფერხებლად. ნებისმიერ შემთხვევაში, საჭიროა ტექნიკური დოკუმენტაციის წარდგენა ავტომობილის შესახებ მონაცემებით, რათა დადგინდეს, რამდენად მნიშვნელოვანია მინაშენები და დე-როზთაშოვანი. ვარდების დახურვამდე, შემდეგ კი ვარდების დახურვის შემდეგ, აუცილებელია თვალი ადევნოთ სურათებს ოსილოსკოპის ეკრანზე. ბავშვების ნაბიჯები არანაირად არ კანკალებს იმ სიჩუმეში, რომელიც მანქანის კონდახზე დავრგეთ.
რეზისტორების მხტუნავების შესაცვლელად აუცილებელია CAN-ავტობუსების შეცვლა ძილის რეჟიმში. Keruyuchi pristroi ქვეშ საათის გატარებული vimiryuvan შეიძლება დაკავშირება. მთავარი ოპირი, რომელიც ემატება იმავე რეზისტორების 120 ომ-ის ჩართვის პარალელურად, ხდება 60 ohms. ეს opir არის vimiryuetsya შორის CAN-High და CAN-Low დირიჟორები.
დამატებითი შენობების დამონტაჟება
დამატებითი დანართების დაყენება, მაგალითად, სანავიგაციო სისტემები, რომელთა მუშაობისთვის აუცილებელია CAN-ავტობუსის სისტემიდან სიგნალების ამოღება, რთული პრობლემაა. ვონი უპირველეს ყოვლისა იფიცებს, რათა იცოდეს წვდომისთვის მოსახერხებელი ადგილი, მაგალითად, მანქანის სიჩქარის სიგნალის ამოღებამდე და მუშაობა, მანქანის ტექნიკური დოკუმენტაციის ხელქვეშ არ გადაგდება, კიდევ უფრო რთულია.
All-World Merezha-ს აქვს ვებსაიტები, სადაც შეგიძლიათ იპოვოთ ინფორმაცია კავშირის მეთოდების შესახებ და სხვადასხვა შენობების დამონტაჟება. Cі vіdomosti, zrozumіlo, არ მისცეთ zhodnih garantіy, რომ უეცრად ყველა რისკს საკუთარ თავზე იღებს ავტოსარემონტო მაღაზია, თითქოს საჭირო იყოს ასეთი მონაცემების მოგება. თუმცა, საუკეთესო გზა საკუთარი თავის გასარკვევად არის მანქანის მწარმოებლის ტექნიკური დოკუმენტაციის გაცნობა. ჩვენი გაცნობის მიზნით შესაძლო სისტემები CAN-ავტობუსი, შეამოწმეთ მონაცემთა გადაცემა, დანართები, რობოტი და გაუმართაობის გამოვლენა, შემდგომ - როგორ შეგიძლიათ დააინსტალიროთ დამატებითი დანართები - ნებისმიერ დროს უნდა შეგვეძლოს სპეციალური ტრენინგის გავლა.
ხშირად, ბუქსირის ყიდვისას ან დამონტაჟებისას, გირჩევთ, აიღოთ ამინდის ბლოკი. Razbiraєmos - რისთვის არის საჭირო ვინი და რატომ არ არის შესაძლებელი ელექტრიკოსების დიდი უნივერსალური ნაკრების მიღება სხვა მანქანებზე ბუქსირის სატარებლად.
Smart Connectტ - შეიძლება ითარგმნოს ინგლისურიდან, როგორც "გონივრული კავშირი". ასეა საჭირო ელექტრიკის შეერთება დასაკეცი ელექტრონული სქემებითა და ბორტ კომპიუტერებით აღჭურვილი თანამედროვე მანქანებში.
დღევანდელ მანქანებში არის ეგრეთ წოდებული can-bus (can-bus) ან სხვა ტიპის ანალოგური და ციფრული ავტობუსები. ავტობუსი საჭიროა დასაკეცი უსაფრთხოების სისტემებისა და წყლის კომფორტის სისტემებისთვის (ABS, ESP, TSP და შიგნით). სისტემის სისტემებს აქვთ საკუთარი ხაზი vikoristovuyut ანონიმური სენსორები, კანის სენსორის მეშვეობით უნდა გაიაროს მინიმუმ ერთი მავთული, რომელზედაც არხი დაკავშირებულია ყველა მავთულის დიდ რაოდენობასთან.
Kan-bus აკონტროლებს ბორტ კომპიუტერს, თუ ყველა სიგნალი მიდის ორზე ნაკლები მავთულით. საჭირო ზონაში სინგალური სიგნალის მიღების აუცილებლობის შემთხვევაში იქ დამონტაჟებულია დამატებითი გაშიფვრის ბლოკი, რომელიც მოჰყვება სიგნალს (სენსორი, ძრავა და სხვა მექანიზმი).
შებრუნების დროს სამგზავრო მანქანასიტუაცია ასე გამოიყურება. ორი ისარი მოდის მანქანის უკანა შუქის ბლოკის დეკოდერთან (გაჩერება, ზომები, ნისლის ნათურები, შუქნიშანი, უკანა ფარები და შიგნით.) შემოდის ორი ისარი და ათეული ან მეტი გამოდის. თეორიულად, შეგიძლიათ სცადოთ მავთულის დაკავშირება დეკოდერის შემდეგ და არ დააინსტალიროთ Smart Connect ამინდის ბლოკი. ალე, ყველაფერი ასე მარტივი არ არის, ბოდიში, ასეთი მცდელობისთვის მანქანის დაკავშირება Check Control (CC) სისტემის მუშაობასთან. გადადით ამაოების გასაუმჯობესებლად მძღოლის მსუბუქი ინჟინერიის საშუალებით, რათა ლანსიუგის მხარდაჭერა ცვლილებამდე მიიყვანოთ. ჩემს ხელში, მანქანის ბორტ კომპიუტერი რეაგირებდა ნაკადის სიმძლავრის არაგონივრულ ცვლილებაზე. რეაქცია შეიძლება განსხვავებული იყოს, თუ თქვენ ცდილობთ ჩართოთ ლანსი, მიუთითოთ უკანა შუქები, როგორც არასწორი განათების აღჭურვილობის სხვადასხვა "გამართულობაზე" და არ შეესაბამება მანქანის სხვა კვანძებს. ასეთი პრობლემების ღერძი და ამინდის ბლოკი Smart Connect.
როგორ დავუკავშირდე Smart Connect-ის საშუალებით?
ელექტრიკოსები კან-ბუსის ბლოკთან არის დაკავშირებული, ისევე როგორც ყველაზე მნიშვნელოვანი უნივერსალური ენერგია - პარალელურ კავშირებზე ჩამკეტი კლიპებით. ალე დაკავშირებულია კომუნალურ ბლოკთან და არა ბუქსირის ბუდესთან. თავად ამინდის ბლოკი დამატებით დაკავშირებულია ბატარეასთან ან ბატარეასთან. ამგვარად, დაკავშირებულ თრეილერთან ერთად, თქვენ მიიღებთ მხოლოდ ძლიერ სიგნალს, რომ ჩართოთ სხვა ელექტრომოწყობილობა და იცხოვროთ ბუქსირის ბუდეზე, გაიაროთ ჭკვიანი კავშირის ბლოკი, როგორც კვების წყარო. საბორტო ბატარეაშუამავლის გარეშე. სწორედ ამიტომ გამორთავთ ენერგიას მანქანის ელექტრულ სისტემაში, რადგან ბორტ კომპიუტერის მართვისას ღვინოები უბრალოდ არ აღრიცხავენ გარე კავშირებს. უნივერსალური ამინდის ბლოკი დამონტაჟებულია უფრო თანამედროვე მანქანებით.
შეგიძლიათ სასურსათო მაღაზიაში.
Მნიშვნელოვანი!
თუ თქვენი მანქანა აღჭურვილია ტრაილერის ბუქსირების რეჟიმით, ჭკვიანი დაკავშირების რეჟიმი ერთი საათის განმავლობაში არ იმუშავებს. ასეთი და სხვა რეჟიმების გასააქტიურებლად აუცილებელია კონკრეტული მანქანისთვის ორიგინალური ამინდის ბლოკების შერჩევა.



