ადვილია თქვენი გარნუ რობოტის გაგზავნა ცოდნის ბაზაზე. გააფორმეთ ქვემოთ მოცემული ფორმა
სტუდენტები, ასპირანტები, ახალგაზრდები, რომლებიც გამარჯვებულები არიან საკუთარი ახალბედების და რობოტების ცოდნის ბაზის შემუშავებაში, თქვენ ისეთივე ბებერები იქნებით, როგორც არასდროს.
გამოქვეყნებულია http://www.allbest.ru/
შეუერთდი
Vimog-ის წინსვლა ამჟამინდელი ადამიანების სამეცნიერო და პრაქტიკულ მომზადებაში და მათთვის ძნელია გაიზარდოს გამარჯვების როლი და vidpovidalnosty ახალგაზრდა თაობის მომზადებისთვის. ძალა სწრაფი ტემპის ვირობიზტვის, გამოცდილი მუშაკის, ინჟინრის გონებაში და ტექნოლოგია, რომელიც უზრუნველყოფს ადამიანის ჯანმრთელობის ფართო სპექტრს, უნიკალური, ინდივიდუალური, შემოქმედებითი პროცესებისა და პროცესების განვითარებას. და რჩევები, რომლებიც აუცილებელია მომავალი პროფესიისთვის, შედის პროცესში პრაქტიკული მიღება... ცე დაარწმუნა მათი აქტუალობა კურსის რობოტები, როგორც ჩვენი ჯანდაცვის სისტემის საჭირო ინფრასტრუქტურის გაძარცვა და არა ინტერნეტის იმ სიმძლავრის ამჟამინდელი მოთხოვნილებების ჩამორთმევა, არამედ რაც შეიძლება ნაკლები.
Meta doslіdzhennya - ორგანიზაცია და ლიდერი ლაბორატორიულ-პრაქტიკული დასაქმების დისციპლინაში "Pristrіy car".
Ob'єkt doslіdzhennya - დასაქმების საწყისი პროცესი PU-ში მანქანის აწყობის დისციპლინით.
doslіdzhennya საგანია ლაბორატორიულ-პრაქტიკული დასაქმება.
დადგინდა, რომ ტყვიის საგანზე შემდეგია:
ცოდნის გაანალიზება პედაგოგში, წასვლა ლაბორატორიის განვითარებაზე და პრაქტიკულ დასაქმებაზე;
შეიმუშავეთ მეთოდოლოგია და zm_st LPZ თემაზე "System dviguna"
1 . ლაბორატორიაპრაქტიკული სამუშაო - პრაქტიკის ორგანიზაციული ფორმა
1.1 „ლაბორატორიულ-პრაქტიკული რობოტის“ გაგება
რობოტების სისტემაში მეცნიერთა მიერ ფართოდ არის აღიარებული ლაბორატორიულ-პრაქტიკული რობოტების მეთოდი. ჩემს სახელს ლატვიურიდან VIN-ს დავარქმევ. laborare, scho ნიშნავს pratsyuvati. განათლებულ სტუდენტებში ლაბორატორიულ-პრაქტიკული რობოტების დიდი როლი შეასრულეს ცნობილმა მოსწავლეებმა. "ხიმი", მ.ვ. ლომონოსოვი, - ნიაკიც კი უკმაყოფილო ჩანს, არ ივარჯიშო თვითპრაქტიკაში და არ ჩაერთო ქიმიურ ოპერაციებში. ყველაზე გამოჩენილი რუსი ქიმიკოსი დ.ი. მენდელეევი, რაც იმას ნიშნავს, რომ წინასწარ მეცნიერებამ აჩვენოს იგი, წერია: სიფრთხილე, პრიპუსჩენნია, დოსვიდი, ვკაზუიუ ციმ ცოდნის დამატებითი (ლაბორატორიული) მეთოდების მნიშვნელოვან მნიშვნელობაზე.
ვის აქვს არსი ლაბორატორიულ-პრაქტიკული რობოტები იაკის მეთოდი navchannya? ლაბორატორიულ-პრაქტიკული რობოტი სწავლის ცენტრალური მეთოდია, თითოეული მოსწავლისთვის, მასწავლებლის მოწმობის მიხედვით და წინასწარ, ვგეგმავთ მუშაობას დღის ბოლომდე ან ახალი პრაქტიკული სამუშაოს ნახვას და ფიქრის პროცესში. ახალი მასალა.
ლაბორატორიულ-პრაქტიკული სამუშაოს ჩატარება ახალი საწყისი მასალის გააზრების მეთოდით, მეთოდური პრიომიის წინსვლის ჩათვლით:
ლაბორატორიულ-პრაქტიკული რობოტის სახით დაკავებულთა წარმოება;
viznachennya შეკვეთა ლაბორატორიულ-პრაქტიკული რობოტები abo okremikh її ეტაპები;
Bezposredn vikonannya ლაბორატორიულ-პრაქტიკული რობოტები მეცნიერები, რომლებიც აკონტროლებენ მკითხველს გადაადგილებისთვის და ტექნიკის ყურადღების ცენტრში;
პრაქტიკული ლაბორატორიული რობოტების შემუშავება და ძირითადი ფუნქციების ფორმულირება.
ვიკლადენი გვიჩვენებს, თუ როგორ შეუძლიათ ლაბორატორიულ-პრაქტიკულ რობოტებს განავითარონ მოზარდობამდელი ხასიათი და გრძნობები დიდად აფასებენ დიდაქტიკას. სუნი უღვიძებს სტუდენტებს ბუნების შესწავლის დიდ ინტერესს, პრაგმატულ გაგებას, ახლის შესწავლას, ცოდნის შენახვას პრაქტიკული და თეორიული პრობლემების შესწავლისთვის. ვიხოვუє თანმიმდევრულობის მეთოდი ვისნოვკაში, აზრის სიმყარე. ლაბორატორიულ-პრაქტიკული რობოტები სტუდენტებს გააცნობიერებენ საშინელ ვირუსულობის მეცნიერულ ჩასაფრებას, რეაგენტების, დანართებისა და ხელსაწყოების მომარაგების გასაღების შესახებ და შეცვლიან მათ აზრს ტექნიკურ მეცნიერებაზე.
ტექნოლოგიური განათლების ერთ-ერთი მიზანია მოსწავლეებში შემოქმედებითი ხედვისა და შემოქმედებითი ჯანმრთელობის განვითარება, რომლის რეალიზებაც შესაძლებელია, პროექტების მეთოდი გამარჯვებულია, მოსწავლეები ერთვებიან შემოქმედებით საქმიანობაში.
შეხედე ადამიანის ინტელექტის სიღრმეებს, კაცობრიობის ინტელექტს, ინტელექტს, ფიზიკურ, გონებრივ საზღვრებს, ინტელექტს, შემოქმედებითი დამოკიდებულების საფუძვლებს და მიღწევას, გენიალურობის საფუძველი, ფსიქოლოგიის მონაცვლეობა არის სწავლის ღერძი, როგორ
რაც შეეხება ვიხოვატ სტუდენტებს, მეცნიერებისა და შემოქმედების მომავლისთვის, ცოდნის აჟიოტაჟური ოფლისთვის, რატომ უნდა ამტკიცებდეს ძველთან ბრძოლა ახალს?
ჩვენი აზრით, აუცილებელია, ჩვენი აზრით, ვიქოვოთი ახალგაზრდა თაობაში, რომელიც სწავლობს მეცნიერების, ტექნოლოგიების, კულტურის შემდგომ განვითარებას და ის, ვინც მას უწინასწარმეტყველებს მთელ დიალექტიკურ პროცესში მონაწილეობის შესაძლებლობას. ; შუკათის პრივატიზება უნებართვოდ არასტანდარტული გადაწყვეტილებებიპრობლემები, როგორ გავზარდოთ ის ახლის დამოუკიდებელ და მუდმივ ხუმრობამდე.
Bezposrednya ბედი მომზადება დამატებითი თაობის მუშაობა შემოქმედებითი საქმიანობატექნოლოგიისა და ტექნიკური შემოქმედების გამარჯვებების მიღება. ალე ვიკლადაჩი არ არის მოსწავლის მენტორი, არამედ პარტნიორი, რომელიც ეხმარება მოსწავლის საქმიანობის მიზნების რეალიზებაში, ექსპერიმენტის ორგანიზებაში, მოსწავლის გონებაში აქტიურობისა და კრეატიულობის გამოვლენაში.
ამასთან, Vicladach არის იგივე სამყარო, პროფესიონალი და უზარმაზარი ადამიანი, მაგრამ ის არის ნარკომანი, ასახავს წამყვანს, არასტანდარტული არასწორი მიმართულება, კამათობს შედეგებს და არ სცემს პატივს დანარჩენ სიმართლეს.
ასეთი მასწავლებლის მომზადების ხელმძღვანელი ყოველთვის აქტუალურია და უფრო ერთდროულად, თუ პროექტი თავისი სპექტაკლების საშუალებით აჩვენებს სწრაფ ინტერესს ტექნოლოგიური ცოდნის მიმართ, რადგან ის მზადაა ადამიანებმა დაინახონ ახალი ფუნქციები შემოქმედების სფეროში. vikonuvati მე ვქმნი რობოტს."
Yakim, ასეთ დროს, maє buti vicladach?
სხვა სიტყვებით რომ ვთქვათ, სტუდენტის ტექნოლოგიური კულტურის აღმასრულებელი დირექტორი არის ზმისტოვნა საწყობის პედაგოგიური წარმოდგენა, რომელიც მოიცავს ახალ ნივთებს მეცნიერებისა და ტექნიკიდან. სწავლისთვის შეიძლება გამოვიყენოთ ფორმები: p'yatikhviliinka ლექციებში, ფაკულტატიურ საუბრებში, დავები, აბსტრაქტული გამოცდა ტექნიკური ჟურნალების სტუდენტების მიერ. ალე, მეორე მხრივ, მინდა მქონდეს ლექციების ახალი ტექნოლოგიები სტუდენტების დახმარების გარეშე.
1.2 ლაბორატორიულ-პრაქტიკული რობოტების პრეზენტაციის იმ ეტაპის სტრუქტურა
Zavdannya, სკოლა ცოდნის შენახვის ორგანიზებას, დაყოფა 4 ჯგუფად:
გადასინჯვის პროცესში უკეთესია ქარხნის გადახედვა;
მომზადებიდან ლაბორატორიულ სამუშაოებამდე;
vikonannyu-ს ლაბორატორიულ-პრაქტიკული რობოტების მიხედვით;
მომზადება საკონტროლო რობოტებისთვის.
Meta Show Underline for:
თეორიული ცოდნის წარმატებით შენახვა პრაქტიკულია;
ანალიტიკური ჯანმრთელობის ფორმულირება;
ლოგიკური შეტყობინების სიჯანსაღის ფორმულირება;
გამარჯვებული ცოდნის სიბრძნის ფორმირება, ნაბუტი კონდახზე, ბოროტი ახალი გონების მოძღვრის მიერ;
ჯანმრთელობის მიზნების ჩამოყალიბება მიზნების დასახვისთვის;
Viroblenya min planuvannya გზების მიღწევა meti;
გისურვებ რეფლექსიას, რომ მართოს შენი საკუთარი შესრულება.
მენეჯმენტი, როგორ მოაწყოს ცოდნის შენახვა სტრუქტურის შექმნის შემცირებისა და მართვის პროცესის შემუშავების პროცესში:
შემოთავაზებული ტიპის ქმედებების მოკლე აღწერა;
ზავდანის ტექსტი;
Razv'yazannya გეგმა;
აუცილებელი თეორიული მასალა: აღნიშვნა, ფორმულები (სუნი იბეჭდება შრიფტში, რომელიც ჩნდება ძირითადი ტექსტის შრიფტში), დიზაინი და ა.შ.
გაკვეთილების ჩატარების პრაქტიკა შენობის გადასინჯვაში გამარჯვებული ციხის ზავდანიდან მკითხველს საშუალებას აძლევს დაინახოს ბაგატორაზოვიდან და დამღლელი ახსნა-განმარტებები. სტუდენტები დამოუკიდებლად, ვიკორისტოვიუჩი გეგმავენ მასწავლებლის მიერ შეთავაზებულ გადაწყვეტას, გადასცემენ თავიანთ სამუშაოს ახალი მუშაკების გონებაში და წარმატებით ასრულებენ.
მენეჯმენტი, საკუთარი რობოტის ორგანიზება მომზადებიდან ლაბორატორიულ რობოტებამდე, შურისძიება:
ანალიტიკური კვება აწესრიგებს მოხსენების მოტივაციას და მიზანს, თქვენი რობოტის ნასწავლი ყოველდღიური მიზნების დასახვის პროცესს, თქვენი მიზნების მისაღწევად გეგმის გააზრებას და მიღებას;
ტექსტი rorakhunkovyh zavdan, რომელიც არის შურისძიება თეორიული კვების, რომელიც აძლევს მეცნიერებს შესაძლებლობას ჩამოაყალიბონ ჯანმრთელობა და ასახვა მათი შესრულების შედეგებზე.
ლაბორატორიის რობოტების ხელმძღვანელი და ინსტრუქციები. სუნი არის გეგმა შეხვედრის დასაწყისისთვის, ერთი ყველა მოსწავლისთვის, მინიმალური მათთვის, ვისაც ეს სჭირდება, დადებითი შედეგის მისაღწევად. რობოტიკის მიზნისთვის სტუდენტი დამნაშავეა რობოტიკის მიზნის საკუთარი სპეციალობის ჩამოყალიბებაში და თეორიასა და პრაქტიკას შორის კავშირის დამტკიცებაში. დარეკეთ შესავალ სიებში, დავეხმარები მოსწავლეებს მიზნების ფორმულებში.
განაგრძეთ ერთი შეხედვით:
Doslіditi fallowness ...;
მოიყვანეთ, კარგად ...;
გადაეცით მას, ვინც არის ... ძალიან გამხდარი"
მეცნიერთა მიერ დასახული მიზნების ცოდნით უნდა მოხდეს გეგმა წარმატებული შედეგის მისაღწევად. მოდით დავასრულოთ შემდგომი მნიშვნელოვანი ნაბიჯით ლაბორატორიულ-პრაქტიკული რობოტების - გრაფიკის პრეზენტაციაში. ახალი მოსწავლე აანალიზებს მიზნების მიღწევის პროცესს, ხსნის შედეგებს და მათ მიზნებს, მათ სისწორეში მიყვანას და მასალების შევსებას. ბაგატორაზოვი დაშვებულია ისეთი საჩვენებელი გაკვეთილებით, ისე, რომ სტუდენტების უმეტესობა არ იყოს გარშემორტყმული ინსტრუქციაში შემოთავაზებული გეგმით - მინიმუმი, რომელიც წარმატებით უმკლავდება საკუთარი განსაკუთრებული მიზნების დადგმას და რეფლექსიას. ეს საშუალებას მოგცემთ გადარჩეთ კმაყოფილების ბანაკში დღის ბოლოს.
1. 3 დაგეგმვის, მომზადებისა და წარმართვის სპეციფიკა ლაბორატორიული და პრაქტიკულიპროფესიული სასწავლებელი
სპეციალური დისციპლინები არის სპეციალობების ძირითადი დისციპლინები, მათზეა დაფუძნებული თავად სტუდენტის, როგორც სპეციალობის სპეციალისტად ჩამოყალიბება. ასეთი დისციპლინებისთვის მომზადების რამდენიმე მიზეზი არსებობს, რადგან რამდენიმე სპეციალობაა.
დასაქმების გეგმა შემუშავებულია ადრე შემუშავებული პერსპექტიულ-თემატური გეგმიდან. ფართო გაგებით - მოთხოვნა დამოკიდებულია არა კონკრეტულ დასაქმებაზე, არამედ სესხის აღების სისტემაზე. ტრენინგის წარმატებით გამოსწორება არ არის ეპიზოდური ამ დაკავებამდე, არამედ რობოტიკის სისტემა, რომელიც მოიცავს:
რეგულარული დასაქმება დისციპლინაში, როგორ გავხდეთ გამარჯვებული;
სისტემატურად vivchennya აქტუალური კვების პედაგოგიკა, ფსიქოლოგია, კერძო მეთოდები;
დახრჩობა თეორიისა და პრაქტიკის ტინი ზიაზიას დიდებულებაში;
მეცნიერებისა და ტექნოლოგიების უმნიშვნელოვანესი მიღწევების ცოდნა;
სამოვიხოვანია.
Vikladach maє virobiti sob robotic system, tobto. ყოვლისმომცველი მიდგომა ნებისმიერი სახის კვების მიმართ, რადგან შესაძლებელია მეცნიერებისა და პრაქტიკის თანამედროვე მიღწევების ურჰუვანასთან მუშაობა. დოსვიდის გადაცემა შეუძლებელია. Yogo Treba vivcati. იოგო არასასიამოვნოა. იოგო უნდა იყოს დაპროექტებული კონკრეტულ პედაგოგიურ შუაში. გამარჯვება შემოქმედებითი მუშაობის პროცესში.
"უცხო" დაშვების შექმნა შეიძლება იყოს გამარჯვებული, როგორც "გამაღვიძებელი მასალა" საკუთარი სისტემის და რობოტების დამკვიდრების, საკუთარი დაშვების პროცესში.
პროფესიული ცოდნისა და დიდაქტიკური კომპეტენციის განვითარებიდან სტუდენტების საწყისი და საგანმანათლებლო საქმიანობის მოდელის საფუძველზე კონკრეტული დასაქმების შემუშავების პროცესი დასაკეცი პროცესის მართვის შედეგია. დასაქმების აგებაზე ფიქრი, სიგიჟემდე აღფრთოვანებულია საკუთარი გამარჯვებებით, მაიბუტნიური დაკავების ოსტატობით, პედაგოგიური მობილურობის დაუფლებით. დაიცავით, რობოტზე ისეთი გადაწყვეტილება, რომელსაც თანმიმდევრულად დადებითი შედეგები უნდა მოჰყვეს, რადგან არ დააკლო კოლეგების, მეცნიერების, პედაგოგიური პრაქტიკის ნახვა. ამ ვიკლადაჩევისთვის აუცილებელია, დაკავებულობის განვითარებისას, დაიცვან მიმდინარე მეთოდური რეკომენდაციები სპეციალურ დისციპლინაში დასაქმების წახალისებისთვის.
აუცილებელია სტუდენტების მომზადება, ლაბორატორიის ძირითადი, მატერიალური და მეთოდური საფუძვლების ხელმისაწვდომობა. ძალიან ნაკლები დაკავება დაიკარგება, თუ თქვენ მოგიწევთ შურისძიება თქვენი მეცნიერების ელემენტზე, მოწინავე პედაგოგიურ რჩევებზე, ერთი მხრიდან, ხოლო მეორე მხრივ - შემოქმედების ელემენტებზე, კარგი ხარისხისვიკლადაკი. უკეთესი დაკავება - შედეგი კარგია კრეატიული რობოტები vikladachayu postіynogo vyskonalennya ე სტრუქტურული კომპონენტები, zmіstu, organizatsionnyh ფორმები და მეთოდები navchannya.
მოსამზადებელი პროცესი შეიძლება ჭკვიანურად დაიყოს ორ ეტაპად: პერსპექტიული, რომელიც მოიცავს მოსამზადებელ სამუშაოს როკის დასაწყისისთვის, ეს ეტაპი - მზადება სიმღერის ვარჯიშისთვის იმ ახალი პროგრამებით და გაკვეთილისთვის.
ახალი სტარტაპის ბედის წინ შაბათ-კვირისთვის მზადება მოიცავს დამწყებ კაბინეტის მომზადებას და დაგეგმილი დოკუმენტაციის განაწილებას. როგორც წესი, ახალი ბოსი მიდის ახალი როკის დასაწყისში, წინა პლანზე დასრულების შემდეგ. ყურამდე დაკავებულია ყველა ტექნიკური ამოცანისა და კონტროლის ძლიერი vip ტესტის ჩატარება ექსპლუატაციისთვის მინიჭების მიზნით, ასევე ექსპლუატაციის ხელსაწყოს განახლებით.
ლაბორატორიული რობოტიკა მეცნიერთა მიერ წარსულის დავალებების შესასრულებლად, დანართების, ხელსაწყოების და ტექნიკური დანართების დროის ბოლომდე. tse vivchennya ნებისმიერი გამოვლინების შესწავლა სპეციალური ustatkuvannya-ს დახმარებით.
პრაქტიკული რობოტები კეთდება დიდი razdіlіv-ის შესაქმნელად, ხოლო მათ თავად აქვთ გალანტური და ახლო ხასიათი. სუნი შეიძლება შესრულდეს აუდიტორიაში და დაიდგას პირველი პოზა (რობოტი არის ლაბორატორიაში, ვიმირ ბილია). სამეცნიერო და სამეცნიერო ცოდნისთვის, შუაში სპეციალური პირველადი იპოთეკური სესხი (ან ყველა ტერიტორიაზე) არის ლაბორატორიები და სპეციალობა.
შეგიძლიათ მოკლედ შეაჯამოთ შემდეგნაირად:
Ozbroyuvati მეცნიერები svidomy, glibok და mіtsnіy ცოდნით;
Formuvati in uznіv mіtsnі navichki რომ vіnnya, მიიღებს მოსამზადებელ іх სიცოცხლემდე;
Pidvischuvati efekt navchannya ერთი საათის გაკვეთილი, ფორმულირება პროცესში navchannya ბრინჯის სპეციალობები;
სწავლაში ფორმირება, თვითდაჯერებულობა, კრეატიულობა, აქტიურობა, ინოვაცია, როგორც სპეციალობის სტილი, უფრო მკაფიო კრეატიულობა, ცხოვრების შედეგად.
Viroblyati vminnya თვითშეგნებულად კითხვა, nabuvati და vyblyuvati chi popovnuvati ცოდნა, pratsyuvati ტექნიკური და іnshoy ლიტერატურით, opanovuvati navichki რომ vіnnya და შემოქმედებითად stasovuvati їkh პრაქტიკაში;
ფორმულები დადებითი მოტივების შესწავლაში პირველადი საქმიანობა, Piznavalny ინტერესი, bazhannya დაჭერა, საჭიროება გაფართოებული და წინასწარ აკრძალული ცოდნა, დადებითად განთავსებული სანამ vchennya.
ჩვენ შეგვიძლია ჭკვიანურად გავანაწილოთ კომპანიების ჯგუფი.
ვიხოვნი ვიმოგი. ვიხოვუვათი ზნეობა, ბუნებრივი მსგავსების ჩამოყალიბება, ცხოვრებისეული ცხოვრების სახიფათო ჟღერადობის დავიწყება, რომელიც იმ ვიმოგამით იკვებებოდა და აქტიურად აყენებდა მას.
დიდაქტიკური ვიმოგი Zabezpechuvat საგანმანათლებლო საქმიანობა ლაბორატორიულ-პრაქტიკულ დასაქმებაში, რაციონალურად დაფუძნებული სიტყვებზე, მეორე მხრივ, პრაქტიკული მეთოდები პრობლემების გამო, ხელით მუშაობა, მცოდნე თანამშრომლების დანახვა. გააცნობიერე ცოდნის ერთიანობის ვიმოგი, ვიხოვანი და ჭკვიანური კავშირის განვითარება თეორიასა და პრაქტიკას შორის, ცოდნა ცხოვრებიდან, ძველი ცხოვრებისეული სიტუაციების ცოდნიდან. აუცილებელია ცოდნის ხარისხზე სისტემატური კონტროლის დამყარება, პასუხისმგებელი პირების კვალიფიკაციის ამაღლების სწრაფი და მარტივი გზა. სამუდამოდ უარი ზარის რეკვასაშუალებას გაძლევთ შეხვიდეთ საწყის პროცესში, koriguvati yogo. როდესაც glades აღმოჩენილია, ცოდნამ უნდა გააანალიზოს ამ ცოდნის მიზეზები და ერთიანობის გზები. ჩართეთ მეცნიერები თვითკონტროლში და თვითკონტროლში თვითსწავლის პროცესში. მეცნიერთა ცოდნის თანდათანობით მიღება აქტიურ საგანმანათლებლო საქმიანობამდე და პრაქტიკული შენობების ხილვადობა პრაქტიკის დონეზე აძლიერებს ცოდნას, უნარებსა და ცოდნას.
ფსიქოლოგიური ვიმოგი ვიკლადაჩი აკონტროლებს კანის ვიმოგას სპეციალისტების მიერ კვლევის სიზუსტეს, ფარდობითობას და თავისუფლებას. ნებისყოფა, რომ მასწავლებლის პერსონაჟი ჩნდება იოგოს ყველა შესრულების დონეზე. მას განსაკუთრებით აფასებენ მეცნიერები სამართლიანობისა და სიკეთის ცოდნის სიფხიზლეს, პედაგოგიური ტაქტით.
ჰიგიენური vimogi Dotrimannya ტემპერატურული პირობები ლაბორატორიაში, განათების სათანადო სტანდარტები. რობოტული ერთფეროვნების უნიკალურობის სლაიდი, ბოროტების ერთფეროვნება, საწყისი ინფორმაციის მოსმენა პრაქტიკული რობოტების სიიდან. არსებობს რობოტების სხვადასხვა სახეობა, რათა მოახდინოს დამატებითი გამოსწორება, რაც საშუალებას გაძლევთ ჩართოთ ორგანიზმები კოგნიტურ შესრულებამდე.
მაქსიმალური გაუმჯობესებისთვის, მოსწავლეებს უნდა შეეძლოთ მოტივაცია გაუწიონ მათ ერთსაათიანი პრაქტიკული მუშაობისთვის. აქტიური ვარდისფერი და პრაქტიკული აქტივობის მეგობრული ყურით, აქტიური არ არის პრიმუსი, არამედ პრობლემის ცოდნა. მხოლოდ ყველა შემთხვევაში იქნება აქტივობა მოტივირებული და პროდუქტიული. აბსოლუტური მოთხოვნა ეძლევა არა კონკრეტულ მოტივაციას (ოტრიმაშ შეფასება), არამედ შინაგანს (ხალხისთვის სახიფათო გახდებით, გახდებით „მოტრიალებული“ პროფესიონალი, შეძლებთ მიაღწიოთ იმას, რაც გსურთ). სწავლაში ვარდისფერი აქტივობის ხელშეწყობის ერთ-ერთი ყველაზე ეფექტური მოტივაციური მექანიზმი არის საწყისი და საგანმანათლებლო საქმიანობის ხასიათი. საფლავის დასაწყისი მნიშვნელოვანი კანონზომიერებაა: გარეგნობის მეორე მხარეს კობის ზედმეტად ზრდა ეტაპობრივად იზრდება შინაგანი დღის ინტერესში.
გასაგებია, თუ როგორ უნდა განვითარდეს საგანმანათლებლო ინტერესი ტექნიკური სპეციალობების სტუდენტებს შორის:
შემეცნებითი ინტერესის განვითარება, საგნისადმი სიყვარული, როგორ ისწავლო და როზის პრაცის პროცესამდე, ცოდნის ისეთი ორგანიზაცია, როცა ისწავლი დამოუკიდებელი ხუმრობის პროცესამდე დაწყებას და ბუნების „დანახვას“. ახალი ცოდნა.
შესასწავლი საგნის მიმართ ინტერესის გამოვლენისთვის აუცილებელია საგნის მოხმარება, მნიშვნელობა და პროფესიონალიზმი მთლიანად და მისი გავრცელების კონტექსტში.
ჩიმ მეტი ახალი მასალაადრე ნასწავლ ცოდნასთან მიბმული, ვინც ისწავლა. ნასწავლის ბმული ინტერესებთან, რაც ადრე უკვე შეიტყო სტუდენტისგან, ასევე, როცა ვურჩევდი ინტერესს ახალი მასალის მიმართ.
Anі nadto light, nі nadto მნიშვნელოვანი მასალა არ არის საინტერესო. Navchannya maє buti მნიშვნელოვანია, ale შესაძლებელია.
ლაბორატორიულ-პრაქტიკული რობოტების ჩატარებისას მნიშვნელოვანია ცოდნისადმი მგრძნობიარე ორგანოების დიდი რაოდენობით მიღება: სმენა, შეგრძნება, დოტიკა, სურნელი. შესაბამისი ინფორმაციის ბაგატოკანალობა არ შეინარჩუნებს ტვინის აქტივობას, მეხსიერების მეხსიერებას. ასევე აუცილებელია ვისწავლოთ როგორ ისწავლოთ საკუთარი სახლის სმენის არხები: უფრო ხშირად ინფორმაცია მიიღება ზორუს ორგანოს მეშვეობით (ვიზუალური არხი), რომელიც მოდის ადრეულიდან, რომელიც აშორებს სმენას ადრეული სმენის არხებიდან). .. იგივე ახალი ტერმინები საჭიროა არა მხოლოდ ცალსახად, არამედ ზოშითში ჩასაწერად.
არ დაივიწყოთ ლაბორატორიულ-პრაქტიკული დასაქმების ფსიქოლოგიური ატმოსფერო: გაკვეთილისთვის პოზიტიური ფსიქოლოგიური ატმოსფეროს საჭიროება, პედაგოგიური ურთიერთქმედების დემოკრატიული სტილის ვიბრაცია.
კანის გადანერგვის შემთხვევაში ამათ მიერ სიახლეები, თემაზე ლაბორატორიულ-პრაქტიკული მუშაობისთვის აუცილებელია სპეციფიკის ანალიზი და ტექნიკის ფორმის ვიბრაცია. ეს დაკავშირებულია ამაზე, სამწუხაროა, კიდევ უფრო მნიშვნელოვანია საკმარისი ძირითადი მასალის მოპოვება იმისთვის, რომ სტუდენტების 100% დაკავებული იყოს იგივე ელემენტებით, ვისაც არ სურს სწავლა (მაგალითად, მნიშვნელოვანია კანის სტუდენტი შიდა ცეცხლი).
თანამედროვე დიდაქტიკური ორგანიზაციაში განათლების ფორმები, მათ შორის ძირითადი და სურვილისამებრ, კლასობრივი და საშინაო დასაქმება, იყოფა ფრონტალურ, ჯგუფურ და ინდივიდუალურ.
ფრონტალური საზღვაო vikladach keru, ჯგუფის საწყის-შემეცნებითი აქტივობა (pidgroup), რომელიც მუშაობს ერთ-ერთ თანამშრომელზე. qiu ფორმა შეიძლება იყოს გამარჯვებული, თუ ლაბორატორიაში არის რამდენიმე ელემენტი (მაგალითად, კარბუტერები), შეგიძლიათ კანის აღჭურვა მათთან. Vikladach organizu spіvrobіtnіstvo მეცნიერები და viznacha ერთი ყველა ტემპი რობოტი. დაკავების პროდუქტიულობა არის მოძრაობა, ასევე შემოქმედებითი კოლექტიური მუშაობის ატმოსფეროში შესვლა, მოსწავლეთა აქტივობის პატივისცემა. დაიცავით შუბლის რობოტი არ აქვს რაიმე ინდივიდუალური მახასიათებლები, მას უბრძანა საშუალო სტუდენტი. ამაზე ერთი მეცნიერი პასუხობს რობოტის მოცემულ ტემპს და ერთი სწავლობს რობოტისგან.
ჯგუფურ ფორმებში, navchannya vicladach keru არის მეცნიერთა ჯგუფების საწყისი-შემეცნებითი შესრულება. შესაძლებელია ლანკების, ბრიგადების, კოოპერატიული ჯგუფების და დიფერენცირებული ჯგუფების გამოწერა.
ლანკოვის ფორმირებები ახლა იძლევა მეცნიერთა ძველი ჯგუფების პირველადი საქმიანობის ორგანიზებას. ბრიგადის ფორმის შემთხვევაში შესაძლებელია გუნდური საგუშაგო ჯგუფების სასიმღერო კომპანიების საქმიანობის ორგანიზება, რომლებიც სპეციალურად შეიქმნა დღემდე. კოოპერატივი - როზპოდილის კლასის ჯგუფში გადაცემის ჯგუფური ფორმა, გამხდარი ვიზონი, ზაგალნის ნაწილი, ზაზვიჩაი, ბევრი ზავდანნია. დიფერენცირებული - შექმნის ჯგუფურ ფორმას აქვს ის თავისებურება, რაც, ფაქტობრივად, დროის ჯგუფებს შეუძლიათ გააერთიანონ მეცნიერები ერთი და იგივე ძირითადი შესაძლებლობებით და ერთ საფეხურზე აღმასრულებელი ხელმძღვანელების ჩამოყალიბება.
ფორმებს ჯგუფურად აძლევენ ბიჭს რობოტიც. კერუს ვიკლადების ჯგუფების მეთაურთა ღვთაებრიობა ასევე პრიორიტეტულია მათი თანაშემწეების - ლანკანებისა და ბრიგადების მეშვეობით, რომლებიც პასუხისმგებელნი არიან მეცნიერთა იდეებზე. მოცემული ფორმა ყველაზე გაფართოებულია „ავტომობილით“ დასაქმებისთვის, ზოგიერთი მათგანი მიუწვდომელი იქნება სტუდენტების დასაქმების შემთხვევითი ლაბორატორიული აღჭურვილობისთვის. მანამდე, ბრიგადის ფორმა იძლევა უნივერსალური ცოდნის პრინციპის მხარდაჭერის საშუალებას, თუ სტუდენტს შეუძლია ისწავლოს თემა, როგორც დამმუშავებელი და სიტყვები „ვიკლადაჩ“, და ზოგიერთი სტუდენტის სასარგებლოდ, ბრიგადის უნარებიდან.
მეცნიერთა ინდივიდუალური ცოდნა მათი სხვებისთვის კონტაქტის გარეშე გადასაცემად. ჩემი დღისთვის, ჯერ არა, როგორც დამოუკიდებელი ვიკონანია ჩი ჯგუფის ზავდანის მთელი კლასისთვის. თუმცა, თუ ვიზიტორის განათლება თვითკმარია, ძირითადი შესაძლებლობების გამარჯვების გათვალისწინებით, მაშინ ამ ორგანიზაციულ ფორმას ინდივიდუალიზებულს უწოდებენ. ამ მეთოდით შეგიძლიათ გამოიყენოთ სპეციალურად დაბზარული ბარათები (მაგალითად, დვიგუნის წერტილები). ზოგიერთ მეცნიერს დიდ პატივს ვცემ ერთსაათიან გაკვეთილს, ამიტომ თუ ისინი დამოუკიდებლად მუშაობენ, ამ ფორმას ინდივიდუალურ-ჯგუფური ფორმა ჰქვია.
ორგანიზაციული ფორმები განიხილება, როგორც მიზანმიმართული: სუნი სტაგნაციაა, როგორც თვითმყოფადი და როგორც ლაბორატორიულ-პრაქტიკული, სემინარი და სხვა.
p align = "justify"> რობოტის კოლექტივი, მხოლოდ დიფერენცირებული ჯგუფის რობოტის საფუძველზე. როდესაც ცომუმ მოიგო ნაბუვაє დაწყების ნიშნები:
კლასი გაიგებს კოლექტიურად აზრს დირექტორის მიერ მიცემული გამარჯვების საფუძველზე და მე წავართმევ ბოლო კვირის სოციალურ აზრს,
ვიზიტორთა ოფისის ორგანიზაცია,
Dіє ასეთი სახის podіl pratsі, რომელიც არის vrakhovu ინტერესი და კანის მეცნიერების სიჯანსაღე, რომელიც საშუალებას აძლევს კანის საღებავს გამოიჩინოს თავი spilіnіy dіyalnosti,
Є ურთიერთკონტროლი და კანის ვარიაცია კლასისა და ჯგუფის წინ.
2 . ორგანიზაცია, რომელსაც მე ვატარებLPZ კურსისთვის "PRISTRII AUTOMOBILYA"
2.1 პროგრამების ანალიზი "მანქანის მიმაგრება"
მთავარი პროგრამა „მიამაგრე მანქანა“ დაზღვეულია 38 წლით. ეს არის 18 წელი თეორია და 20 წელი პრაქტიკა.
ვივაკებიდან ბოლო ეხება მათ და იმ წლების რაოდენობას, რომლებიც შემოიღეს viv-ებში, რომლებიც შეიძლება შეიცვალოს ჯგუფის მომზადების პროცესში და თავდაპირველი გეგმა.
შეეცადეთ შეიტანოთ ცვლილებები პროგრამის ხელმძღვანელს, შესაძლოა, მათ მეთოდური კომიქსით აჩვენებენ და სინათლის ოსტატის მიერ გამაგრებულნი.
თეორიული დასაქმებისას ვიკარისტები დამნაშავენი არიან დეტალებში, შესანახ ერთეულებში, დანართებში, შეკრებებში. Vivchennya რობოტები აგრეგატების, მექანიზმებისა და დანართების ზედამხედველობისთვის ნაჩვენებია მოდელებსა და აგრეგატებზე. საჭიროების შემთხვევაში, slid vikoristovuvati დიაგრამები, პლაკატები, გამჭვირვალეები, სლაიდები, ფილმები, ფილმები და ვიდეოები. საწყისი მასალის შემუშავების პროცესში აუცილებელია მეცნიერთა სისტემატიურად გადამზადება დამოუკიდებელ რობოტებზე სამეცნიერო-ტექნიკური და რევოლუციამდელი ლიტერატურით, პრაქტიკა და სემინარების ჩატარება.
თემის „მიმაგრება მანქანის“ დაჭერისას შეგიძლიათ შემდეგი რეკომენდაცია გაუწიოთ:
კონკრეტული მანქანის დანიშვნა
მანქანების ელემენტი (სამუშაო ორგანო), რომელიც განკუთვნილია ტექნოლოგიური პროცესის განსახორციელებლად
წინასწარ ჩაწერილი ორგანოების ზრდა და მონტაჟი
მთლიანობაში მუშა ორგანოებისა და მანქანების გაძლიერების და კონტროლის სქემის პრინციპები
ტექნოლოგიური რეგულირება
შეიძლება არსებობდეს ტექნოლოგიური და ტექნიკური დარღვევები, ნიშნები, გამოვლენის მეთოდები, როგორიცაა დარღვევები, აგრეთვე მათი არასწორი მიზეზები; უსამართლობის გამოყენების გზები და მიზეზები
მანქანების ტექნიკური მომსახურებისა და ტექნიკური მომსახურების წესები
მანქანის ეკონომიკური და ეკოლოგიური მახასიათებლები და ტექნოლოგიური პროცესი პრაქტიკაში უსაფრთხოა.
„მანქანის კონტროლის“ თემაზე ლაბორატორიულ-პრაქტიკული სამუშაოები ტარდება სპეციალურ საკუთრებაში არსებულ ლაბორატორიებში, როგორიცაა სრული მანქანები, როგორიცაა საწყობები.
ლაბორატორიულ-პრაქტიკული სამუშაოს ორგანიზებისას აიღეთ საგანი „მანქანის კონტროლი“ და დააკვირდით პროექტის ბოლო დღეს:
ქალაქის ამ ნაწილის გარეთ, მანქანების ან შესანახი ერთეულების აღება
Vivchennya ნაწილების ურთიერთდაკავშირებაში, საწყობის ნაწილების გონება და მანქანის შესანახი ერთეულები, დაცვა და გაგრილება
Vivchennya ტექნოლოგიური და ოპერატიული კონტროლი, რობოტების ტექნოლოგიური სქემები
Vivchennya zmіstu ტექნიკური მოსამსახურეები, ვაა, შევინარჩუნოთ ნორმალური რობოტის შესანახი ერთეულები ექსპლუატაციის პროცესში
Vivchennya შესაძლო ექსპლუატაციური არაადეკვატურობისა და უსუნენიის მეთოდების შესახებ
საწყობის ნაწილების და დანადგარების დაკეცვა მთლიანად.
ტყავის ბიუჯეტების შემთხვევაში თავდაპირველი შენახვის ერთეულების აკრეფის ეტაპი მოითხოვს ოპტიმალური გონების ჩამოყალიბების აუცილებლობას პირველადი მიზნების მისაღწევად, რომლებიც დამნაშავეა დიზაინსა და ტექნიკურ რუქებში. წყნარ შემთხვევებში, თუ სამონტაჟო რობოტები შრომატევადია, ერთი საათის განმავლობაში რობოტული მექანიკის პრინციპის ადაპტაციისთვის, ან სისტემა შეიძლება არაადეკვატური იყოს, სამუშაო მანქანებზე მყოფ დედებს ურჩევენ შეარჩიონ და მოემზადონ საწყობების წარმოებისთვის.
ლაბორატორიული პრაქტიკული სამუშაო
2. 2 დაგეგმვა-ორგანიზება ლაბორატორია - პრაქტიკულივაუსესხებამე თემაში ვარ"სისტემადვიგუნა»
პრაქტიკული დასაქმება დისციპლინაში „მანქანის კონტროლი“ ხორციელდება სპეციალურ ლაბორატორიაში. ამ ლაბორატორიის განსაკუთრებული მახასიათებელია ის, რომ იგი ადეკვატურად არის აღჭურვილი ინსტრუმენტებითა და ძირითადი განლაგებით ნებისმიერი კურსის მომზადებისთვის. თუმცა, არის გარკვეული ხარვეზები: ისეთები, რომლებშიც აუცილებელია მუშაობა დიდ ერთეულებთან, როგორიცაა მანქანის მართვა, ძრავა, მანქანის კორპუსი, ყველა სტუდენტს არ აძლევს საშუალებას, დაიკავოს ერთი საათი, რადგან ისინი მიდიან ლაბორატორიაში. ერთი ოკუპაციის თემაზე. ამასთან, ეს არის ყველაზე რაციონალური თვალყური ადევნოთ იმ თემებს, რომლებიც ახლოა, მაგრამ არც ისე შრომატევადი.
ცხადია, იკის კონდახი, გეგმავს პრაქტიკულ ოკუპაციას თემაზე "System dviguna".
პრაქტიკული დასაქმების განხორციელება უზგოძენესთვის დისციპლინის თემატური გეგმისთვის, ახსნა-განმარტების მიცემისთანავე მათ, ან მაქსიმუმ ერთში - ორზე (თითქოს დაკარგულთათვის დაიკარგნენ). ლაბორატორიას აქვს შიდა წვის ძრავების ორი მთავარი მაკეტი, რომლებზეც ერთ დროს შეიძლება იყოს 6 ადამიანი, სადაც ეს სუნი იკავებს მთელი ლაბორატორიის ფართობის 50%-ს და მთლიანი 65-70%-ს. დამხმარე ინსტრუმენტი. საშუალო ჯგუფს ჰყავს 12 მოსწავლე. ეს ნიშნავს, რომ ის მშვიდია, რომ დაკარგულია, მისი გაზრდაა საჭირო, ლაბორატორიის ზონიდან მცირე მანძილზეა და სუნიანი ინსტრუმენტი შეიძლება წარმატებული ყოფილიყო.
ნაიბილში რაციონალურად ახორციელებს პრაქტიკულ მუშაობას მათ მიერ მოცემულთან და ამავე დროს ერთი საათი დატვირთული თემებით: „ტრანსმისია“, რომელიც სამ სტუდენტს საშუალებას აძლევს დაიკავოს საწყისი ლაბორატორიის 30% და 10% , 15-20% ყავისფერი ლაბორატორიული ფართობი და 15-20% ინსტრუმენტისთვის.
ეს თემა ერთ-ერთი ყველაზე გავრცელებულია საწყისი დასაქმების დაგეგმვისას. პოლიაგის პრობლემა ის არის, რომ კანი ასე დატვირთულია ერთი საათით ადრე. მოცემული სამუშაოს დახარჯვის პირველი საათი პირველია ასეთი გონების მოსინჯვისთვის:
სტუდენტები შეიძლება იყვნენ დაკავებულნი თავდაპირველი დაკავებით.
კანის ხელსაწყოს აქვს ინსტრუმენტი და არის სამუშაო ინსტრუმენტი.
სტუდენტი დამნაშავეა იმაში, რომ იცის რობოტის სწორი მეთოდი მოდელით, მაგალითად, პრაქტიკაში.
სტუდენტი დამნაშავეა ამ ერთეულებითა და დეტალებით რობოტების უსაფრთხოების ტექნიკის წესების მკაფიოდ დაცვაში.
ყველა სტუდენტი დამნაშავეა პრაციუვატიში ერთ რიტმში: დაიწყეთ და დაასრულეთ რობოტის მუშაობა ერთდროულად.
ეს არის დატვირთული დღე იმისთვის, რომ დააჩქაროს ის დრო, როდესაც ეს დრო სტუმრის ტრივიალურობისთვისაა.
მთელ დატვირთულ პრეზენტაციაში ადვილი გასაგებია სტუდენტების ნამუშევარი.
Vikonannya რობოტებისთვის თემაზე "System dviguna" ორი DVZ-ის კანზე, თითო სამი ინდივიდი. აქ ბრიგადის ფორმა იმარჯვებს. ბრიგადა არის გუნდის წევრების გუნდი, რომლებიც გატაცებულნი არიან თავიანთი ცოდნითა და ჯანმრთელობის მიმართ. ოსტატი (განკუთვნილია როგორც ვიკლადი) - პასუხისმგებელია რობოტის ორგანიზების ხარისხზე. Oskіlki თემა მშვენიერია і 6 აკადემიური წლის სესხება, შემდეგ ოსტატის როლში მიიღებთ ტყავის სტუდენტს ჯგუფიდან. შუა ბრიგადის როზპოდილი მოხალისედ იმუშავებს, იმისთვის, რომ სურდეს, რომ ტყავის სტუდენტს სურდეს ერთხელ ეწვიოს ICE მაკეტებზე ყველა რობოტს (დაკეცვა, კრეფა, მორგება).
Qia სტრუქტურა დაკავებულია ნებადართულით:
Zakrіtі from studentіvіdomі, glibokі და mіtsnі ცოდნა იმ;
ჩამოაყალიბეთ საგანმანათლებლო დაწესებულებებში რჩევები, რომლებიც მიგიყვანთ მომავალში გახდეთ პროფესიონალი თქვენს გალუზაში;
პიდვისჩუვატი დეფექტი დატვირთულობაზე მუშაობაში, პიდვისჩუვატი განსაკუთრებით რეაგირებს რობოტზე, როგორც საკუთარ, ასევე ჩემს ბრიგადაზე;
Zdіysnyuvati საგანმანათლებლო დაწესებულებების ყოვლისმომცველი განვითარება, їх ქვეყნების განვითარება და განსაკუთრებული მახასიათებლები;
Viroblyati vminnya თვითმმართველობის შეგნებულად გათავისუფლდა მისი მადლიერება და კეთილგანწყობა ამხანაგები, nabuvati რომ glimpse chi popovnuvati პრაქტიკული ცოდნა და navichki;
მოსწავლეები აყალიბებენ დაწყებითი საქმიანობის პოზიტიურ მოტივებს, საგანმანათლებლო ინტერესს, ცოდნას, მოთხოვნას გაფართოებულ და ახალ ცოდნაზე, დადებითად განლაგებულ საღამომდე;
ურჩიეთ სპეციალობას, ჰკითხოს სტუდენტს რობოტის კანის ტიპის ხილვადობაზე, თვითნაკეთი რობოტის შესახებ;
რობოტის შესრულებისთვის თემაზე "Crank-შემაერთებელი ღერო და გაზის წარმომქმნელი მექანიზმები" სამი სტუდენტის კანზე, რომლებიც არიან რობოტი vikonuyu, იგი განიხილება როგორც ინდივიდუალური რობოტი, ისეთი წოდება, რომ არ გადაიტვირთოს. შენი რობოტი, ვიკონ. რობოტები იყენებენ ინდივიდუალურ ხელსაწყოს, რა სახის რობოტებია დასაშვები. მაგრამ აქ არის განსაკუთრებული თვისება: KShM-ს ბევრი დეტალი აქვს და რობოტი უნდა დამონტაჟდეს ორ აკადემიურ წელიწადში. იმისათვის, რომ ამ რობოტმა ორი ან სამი ნაწილის ვიბრაცია მოახდინოს (მაგალითად, დგუშის ჯგუფი ან დამაკავშირებელი ღეროების ჯგუფი), რომელიც შეიძლება ჩასვათ სტანდარტულ საწყის წყვილში ერთი საათის განმავლობაში. ამ განყოფილების განსაკუთრებული თვისებაა ინდივიდუალური სამეცნიერო ცოდნა. ეს არ არის სხვა სტუდენტებთან კონტაქტის გარეშე გადასვლა. ჩემი დღისთვის ეს არც ისე კარგია, როგორც დამოუკიდებელი ვიკონანია შენობების მთელი ჯგუფისთვის. ტყავის სტუდენტი პრაქტიკულია მინიმალური ხელსაწყოებით, შესანიშნავი ტიპის რობოტი არ გადასცემს ტექნოლოგიური აღჭურვილობის ეფექტურობას.
რობოტის გამარჯვების დროს მოცემულია შემდეგი ფორმა:
სტუდენტი გაიგებს ექსპერტის აზრს მოცემული შეფასების საფუძველზე,
გამოფენის ორგანიზება საშუალებას აძლევს სტუდენტს გამოავლინოს ინდივიდუალური თვისებები, განავითაროს თავი პროფესიონალად თანაკლასელების თვალში და გამარჯვებები.
მეტი ლექციები და წაიკითხეთ მათი სტრუქტურა
ურჩიეთ სპეციალობას, ჰკითხოს სტუდენტს კანის რობოტის გარეგნობის შესახებ, თუ როგორ არის რობოტი თვითკმარი;
რობოტების მობილიზებით თემაზე "ბენზინის, გაზის და დიზელის ძრავებივიკორისტოვუცია ორი ორგანიზაციული ფორმა: ინდივიდუალური და ბრიგადა. ბრიგადა (2 ადამიანი) არის ვიზიტორი, რომელიც ამ მუშაკს უფრო ახვევს რობოტზე, მაგალითად, სატუმბი ტუმბოს დაყენება საწურში, სესხის აღების ფასი საწყის საათში 80%-ს უახლოვდება და შემდეგ მოცემული ერთეულის რეგულირება, ამიტომ მიეცით ბრიგადას ორთქლის აღების უფლება. სტუდენტები, რომლებიც ბრიგადის ბედს ერთი საათის განმავლობაში იღებენ, რეგლამენტის შეცვლით არიან დაკავებულნი. სტუდენტს, რომელიც მუშაობს ინდივიდუალურ ფორმაში, აქვს სისტემის სხვა ნაწილები: ინჟექტორები, სექციები, ავტომატური კლაჩი პროგრესული დამწვრობისთვის და ყველა რეჟიმის რეგულატორი. უამრავი ადამიანია, ვინც საკუთარ თავს მცირე შრომით ხსნის. შეფასების კრიტერიუმები მოცემულია ცხრილში 1:
ცხრილი 1 - რობოტიკის სტუდენტების შეფასება
|
Otsіnyuvanі navichki |
ჩამკეტი რობოტს |
Vmіnnya vikoristovuvati otrimanі ადრეული ცოდნა და რჩევები კონკრეტული თანამშრომლების გადასინჯვისთვის. |
Vmіnnya vіdpovіdati ელექტრომომარაგების, krystuvatsya პროფესიული და უცხოური ლექსიკის შესახებ |
|||||
|
შეფასების მეთოდი |
კერვნიკზე თვალის დევნება, მასალების დათვალიერება. |
მეკარის დაცვა. მასალების განხილვა. |
სპივბესიდა. |
|||||
|
საზღვრების შეფასების კრიტერიუმები |
ჩვენ ვიყენებთ მასალებს, რომლებიც მოცემულია პირობების ინსტრუქციებში, არ საჭიროებს დამატებით საათს. |
არადამაკმაყოფილებელი რობოტის გაცნობას ერთი საათი არ დასჭირდა. |
დამატებითი ახსნა-განმარტებების (მინიშნებების) გარეშე, ვიკარისტული რჩევები და ხრიკები, რომლებიც ამოღებულია დისციპლინების ტრენინგის დროს "მანქანის ნაწილები", "გიდრავლიკა", "ჰიდროპნევმატური დრაივი" |
არადამაკმაყოფილებელი არც ისე დიდი ცოდნა ერთ საათამდე განაწილებაში. |
კომპეტენტურად წაიკითხეთ კვების წყარო, ვიკორისტი და პროფესიული ლექსიკა. თქვენ ასევე შეგიძლიათ დააბრუნოთ თქვენი თვალსაზრისი პრობლემის შესახებ. მიაღწიეთ მეტას ლამაზად. |
არადამაკმაყოფილებელი საგნის უცოდინარობის ჩვენება კვების, დაბალი ინტელექტის, ვუზიკის ჰორიზონტების, თანმიმდევრული ლექსიკის სახით. გარდაუვალობა ნათლად არის გამოხატული როგორც ტიპებში, ასევე სპექტაკლებში. |
ასეთ რანგში აღწერილია დასაქმების სტრუქტურა, რაც ჯგუფში ყველა სტუდენტის მეტი ჩართვის საშუალებას იძლევა, უზრუნველყოფს დასაქმების 100%-ს და შემოთავაზებული თემების გამკაცრებას.
დიდი და გარდაცვლილი vivchennya-სთვის ბევრი სამუშაოს შესრულებამდე, რეკომენდებულია დამატებითი ოკუპაციის ჩატარება უსაფრთხოების ტექნოლოგიიდან სიკოფანტების და კეთილი ნების რობოტების სტუმრებისთვის, ასევე ახალი ფილმის ჩვენება თემებით გადატვირთული. აუცილებელია სტუდენტებს საშუალება მივცეთ ვიზუალურად გაეცნონ თავიანთი რობოტიკის ობიექტებს და გააუმჯობესონ სალექციო მასალის საინფორმაციო შინაარსი.
ასევე, სანამ LPZ ჩატარდება, schob z'yasuvati, როგორიცაა პრობლემები მცოდნეებისთვის, სტუდენტებისთვის მათთან ერთად, ტარდება ტესტი "Pristrіy car" (Dodatok A).
2. 3 ახორციელებსრომ შედეგებიLPZ თემაზე "System dviguna"
№12 პროფესიული სასწავლებელი სუვერენული მმართველობა, კარგად, სასწავლო პროცესი და Cob პროგრამის განხორციელება პროფესიული განათლება
საგანმანათლებლო პროცესის ძირითადი მეთოდი სკოლებში არის მაღალი ხარისხის სტუდენტების პროფესიონალი მუშაკების მომზადება (რობოტები, მომსახურე მუშაკები) ურიადის მიერ დაწესებული კობ პროფესიული განათლების პროფესიების მხრივ. რუსეთის ფედერაცია: "მშრალი ბიზნესის მეისტერი", "ცივი აყვავებული რობოტების მეისტერი", "ხუროს-ტესლარსკის და პარკეტის რობოტების ოსტატი", "ავტომეხანიკი", "ზვარიუვალნიკი", "მაისტერ როსლინნიცვა", "ოპერატორი EOM", "კუჰარი, კონდიტერი". ", პროფესიული განათლება პროფესიისთვის "დრუკარსკოი სპრავის ოსტატი".
სკოლას აქვს საკუთარი ავტოსკოლა, რომელიც ატარებს სწავლებას და წყლის გადამზადებას კატეგორიებისთვის "A", "B". "S", "BC", "D"
1994 წლიდან სკოლის ბაზაზე მუშაობს ქალაქისა და რეგიონის სამრეწველო საწარმოებისთვის მუშა პერსონალის მომზადება და გადამზადება.
ჩვენ განვახორციელეთ პრაქტიკული სერიები თემაზე „სისტემის დვიგუნა“.
მეტა რომ zavdannya vivchennya იმ.
მეტა - დიზაინის ცოდნის მიცემა, თეორიის საფუძვლები, ძრავის სისტემების შემუშავება და ტესტირება, რომელიც აუცილებელია მანქანების ეფექტური ტესტირებისთვის.
ხელმძღვანელი - საავტომობილო სატრანსპორტო საშუალებების სისტემების სამუშაო პროცესების დიზაინისა და თეორიის საფუძვლების ვივჩენია; მეთოდები obruntuvannya їkh კონსტრუქციული და მარეგულირებელი პარამეტრები; ენერგეტიკული და ეკონომიური, დამახასიათებელი არაადეკვატურობისა და დანაკარგების აღნიშვნის მეთოდები.
ვიმოგი სტუდენტების მომზადების დონემდე, რადგან მათ მიერ ტრენინგი დაასრულეს.
შედეგად, სტუდენტი დამნაშავეა თავადაზნაურობაში:
რობოტიკის პრინციპი, ბუდოვუ, არის ავტომობილების თანამედროვე სისტემების კონსტრუქციული მახასიათებლების აღნიშვნა;
ვიპრობუვანის მეთოდები და სატრანსპორტო საშუალებების სისტემების ტექნიკური მომსახურების საფუძვლები, სისტემების შესანახი ერთეულები;
ვიმოგი სატრანსპორტო საშუალებების ენერგეტიკული სისტემების ექსპლუატაციისთვის;
ძირითადი ტენდენციები ძრავის ძრავების დეტალურ სისტემებში.
სტუდენტი დამნაშავეა:
დამოუკიდებლად დაეუფლეთ ახალი მანქანების კონსტრუქციებსა და სამუშაო პროცესებს,
დაზიანებები და დაზიანებები ხდება მანქანების რობოტულ სისტემებსა და ძრავებში;
Vikonuvati-ის ძირითადი სერვისები ძრავის სისტემების ტექნიკური მოვლისთვის
ალბათ ერთ-ერთი მათგანის მოკლე შინაარსი.
დატვირთული თემა: "ბენზინის, გაზის და დიზელის ძრავების ცხოვრების სისტემები"
1. Systemi dviguna;
2. Vzaєmodiya და Privid სისტემები dvigun;
3. დეტალები და შეკრებები რობოტების სისტემების დასაცავად;
4. დვიგუნის ძირითადი მექანიზმებიდან წინამორბედი სისტემების ხარისხი;
გაკვეთილის მიზანი:
1. ოსვიტნი:
ცოდნის კონსოლიდაცია რობოტიკის პრინციპის მიღმა და დვიგუნის ყველა სისტემის კონტროლი.
2. ვიხოვნი:
svidomoy დისციპლინის დამაგრებული ნავიჩოკი;
ფრთხილად მოთავსებულია ამ მოდელების თავდაპირველ ფლობამდე;
არჩევანი და პატივისცემა რობოტის საათის მიმართ;
3. განვითარება:
იმ ფილმის ტექნიკური არასწორი ინტერპრეტაციის შემუშავება;
სიმცირის ზრდა რომ უვაგი, უიავი;
ამოღებულია ინფორმაციის ანალიზის უნარის განვითარება.
თავიდანვე: ნაუჩნი მაკეტები, პლაკატები, ნაუჩნი პოსიბნიკები, ხელსაწყოები და დანართები.
გაკვეთილის ტიპი - ლაბორატორიული - პრაქტიკული დაკავებული.
გაკვეთილზე გადასვლა:
1. საორგანიზაციო მომენტი
ყოფნის გადახედვა - 2 წთ.
მათ მიერ გაკვეთილზე - 3 წთ.
ბლანტი გარეგნობის შემთხვევაში უსაფრთხოებისა და ზოგადი სანიტარული ტექნოლოგიის ძირითადი წესებიდან გამომდინარე, რობოტირდება კანის სამუშაო მანქანაზე - 5 წთ.
2. პირველადი საქმიანობის მოტივაცია
იმ მიზნებიდან გამომდინარე, რომ იყოს დაკავებული და ერთმანეთთან დაკავშირება, კომენტარებით ძილი მოსწავლეების რობოტების მომავლის ტრენინგის წინ - 8-10 წთ.
1) დაასახელეთ შიგაწვის ძრავის სისტემის ძირითადი მექანიზმები.
2) აღწერეთ 4 ტაქტიანი ბენზინის ძრავის რობოტიკის პროცესი.
3) დაასახელეთ შიგაწვის ძრავის გაგრილების გზები.
4) კარბუტერისა და დიზელის ძრავის ძირითადი მნიშვნელოვანი მახასიათებლები.
3. Viconannya რობოტები გაკვეთილის გეგმიდან - 60 წთ
შესავალი ინსტრუქცია
უსასრულო რობოტების მთავარი გონება:
სამუშაო მისიის ორგანიზება სწორია:
სპეციალური ბიჭი დამნაშავეა ჩექმის გარეშე სიმების გარეშე, scho zvisayut, sleeves trebnuti ან გააფართოვოს vishche lіktya.
აუცილებელია მისი სისუფთავე და მოწესრიგება. სამუშაო ზედაპირის ფართობი ფართოა, გარე ობიექტების გარეშე, კარგად განწმენდილი.
რობოტამდე აუცილებელია ხელსაწყოს განთავსება კონკრეტული თანმიმდევრობით.
როდესაც რობოტი დასრულდება, აუცილებელია რობოტის სწრაფად გაწმენდა, ხელსაწყოების გასუფთავება;
Vikoristannya მოკლებულია საცნობარო ინსტრუმენტებს:
ხელსაწყოს შეუძლია რობოტი უსაფრთხო გახადოს, ტობტო. ჩვენ ვართ დამნაშავეები, მაგრამ ჩვენ გავასუფთავებთ მას, ჩვენ დავეხმარებით იმ კეთილგანწყობილ pіdіgnanim.
მჭიდროდ გამკაცრებული თხილების დასაკრავად ან მათი გასამაგრებლად, გაზარდეთ ბოლო ქანჩები, რომლებიც ექვემდებარება ბევრი მნიშვნელოვანი გამკაცრებას.
გასაღების თავი უნდა იყოს გამკაცრებული კაკალზე, მოუფრთხილდეს პოზიციას და მოხსნას სახელური ისე, რომ ხრახნი თავისკენ გაისწოროს და არა თავისკენ. სიფრთხილით ჩადეთ და დაამაგრეთ საგანძურის დამაგრების ასეთი დეტალები, ფრთხილად იყავით, რომ ნაწილების შედუღებული მოაჯირი არ შეცვალოთ მტკიცე კიდეებით.
ვიკრუტოკების სახელურები დამზადებულია მეტალოპლასტმასის ხისგან, დამაგრებული პიტნით. ხის სახელურებზე დგას ლითონის ბეჭედი, იაკ ადევს სახელური rozkolyuvannya-დან. Koristuvatisya ხელსაწყოებით დაუსაბუთებელი სახელურებიდან და მათ გარეშე ფარიკაობით.
სუვორმა არ მიიღო რაიმე განსაკუთრებული დისციპლინა და უსაფრთხოების ტექნიკის წესები:
Gostri іnstrumenti წადით ძმებო იმ ნაწილზე, რომელიც არ მუშაობს, ოღონდ მოგცეთ, მოაჭრათ სამუშაო ნაწილი თქვენთვის.
ჭავლები, შტეფსელები, ზამბარები, თავები, შუასადებები უნდა იცოდნენ, რომ ისინი უნდა იყოს დაყენებული, რათა თავიდან აიცილონ უბედურება.
ოპერაციების სწორი ტექნოლოგიური წარმოდგენის შენარჩუნება.
პროექტის მიწოდება სტუდენტებისთვის, რომლებიც ვარჯიშობენ ინდივიდუალური ფორმით.
მართვა 1. აღწერეთ ძრავის სასიცოცხლო ციკლის სისტემის რობოტული გამოყენების პრინციპი გაზის გამოყენებით. დახაზეთ GAZ-2417 მანქანის სიცოცხლის დიაგრამა.
დაწყება 2. საათში galvanized viprobuvan dvigun D-240 ნომინალურ რეჟიმში buli otrimani ასეთი დან: ღირებულება galvanized წნევის - 35 kgf; kol_nchastny ლილვის შეფუთვის სიხშირე - 2200 rpm; პალივა ვიტრატა დოსვიდზე-100 გ; საათი -25 წმ-მდე; .მექანიკური კკდ - 0.85. დაადგინეთ, როგორ მივაწოდოთ ძრავის საჭირო და ეკონომიური ინდიკატორები ტექნიკურ პასპორტს. გამწევი სიმძლავრის ხილვადობა (კვტ) გამოიყენება ძრავის მახლობლად დამატებითი მექანიკური საყრდენებისთვის.
Coriguvannya vikonannya rob_t მოთხოვნისთვის.
4. მოსწავლეთა ჭირვეულობა დაკავებულია, შეფასებების სიშიშვლე, სტუდენტების ელექტრომომარაგების ანაზღაურება - 5-2 წთ.
5. მთავარი zavdannya: ზოშიტა-ხმის სისწორის გარკვევა, ჩატარებული რობოტის ანალიზი - 5-2 წუთი.
ვისნოვოკი
სამუშაო დღის დაწყებამდე შაბათ-კვირისთვის მზადება ნადირობისთვის პედაგოგიური სწავლების ელემენტების გარეშე. ეს არის დასაკეცი პროცესი, როგორც ცოდნისა და სიბრძნის დიდებული სახის მასწავლებელი, კარგი სპეციალობებისა და პროფესიული თვისებების, უფრო მკაფიო უტრიმუვატი პატივისცემას სცემს სტუდენტებს და აანალიზებს სიტუაციას. მასწავლებელი შეხვედრის ჩატარების პროცესით არის დაკავებული, მოსწავლეები კი იწყებენ სწავლას. ეს არის ორმხრივი პროცესი, რომლის მხარეების შეურაცხყოფა თვითგამორკვევის პროცესის პერიოდში მუდმივად თვითშესრულებულია.
ყველაზე პროდუქტიული და პირადი დიალოგისთვის, დაწყების პროცესში, გამარჯვებებს შეუძლიათ დაზოგონ თაობების დაგროვება და ოპტიმიზაცია გაუკეთონ დაზოგვას კონკრეტული დასაქმების განხორციელებისას. შექმნის ფორმები და მეთოდები არის მთელი ბაზა, საიდანაც აუცილებელია თქვენი დაკავების პროექციის დროს უზრუნველყოფა. სწორი ვიბრაციაფორმებს navchannya - tse zaporuka წარმატებული წარმართვა დასაქმების. Vibir და obruntuvannya zasosuvannya სიმღერა ქმნიან navchannya დაწოლა მათთვის დაკავებული, yogo დასაკეცი, სანამ კვირის ბოლომდე და ჯანმრთელობის მეცნიერები. Tsey vibir შესანიშნავად არის როგორც სტუდენტების ცოდნისთვის, ასევე ყველა ტრენინგის ეფექტურობისთვის.
შუა სპეციალური პირველადი იპოთეკის საქმიანობა განსაკუთრებით არ არის პედაგოგიური მაჟორიტარი: მეცნიერებს და სპეციალობის სპეციფიკას აქ როლი ექნებათ. პროექტირებისას ცოტა მეტი დრო დაუთმეთ. ყველაზე ოპტიმალური გზაა მასალის іgrovіy ფორმით გამოკვება. ეს საშუალებას აძლევს სტუდენტებს მაქსიმალურად გაზარდონ კომუნიკაცია და განავითარონ ჯანმრთელობა მათში ინფორმაციის ადეკვატური მიღების, საკუთარი და მესამე მხარის ეფექტურობის ანალიზისა და მათი სპეციალობების ფორმულირებისთვის. ასე რომ, ძალიან აუცილებელია პროფესიონალიზმის განცდის განვითარება, ძირითადი იპოთეკის ზოგიერთი ღირებულების - ყველაზე ღირებული კროსი მეცნიერთა დამოუკიდებელ ცხოვრებაში. განათლების იმ საფეხურებიდან ცეი, რომელიც მოსწავლეებში ხასიათის ფორმაა, აძლევს მთლიანობას და ცხოვრებისეულ ორიენტაციას, საფუძველს უყრის მომავალ კარგ პროფესიონალიზმს და დასახული მიზნების მიღწევის სურვილს.
ერთ საათამდე დატვირთული დროის დაგეგმვამდე აუცილებელია დრო დაუთმოთ სტუდენტის საჭიროებებს, როგორც სპეციალობას. მიეცი სიცოცხლე შენს სიცოცხლეს, განავითარე ცოდნა ცოდნას, თვითგააზრებას, წაიკითხე, რომ არ მიაღწიო იმას, რასაც მიაღწიე, ლოიალურად შეეგუე ადამიანებს, რომლებიც გუნდში არიან პრაციუშები, პრაციუვატები, მე შევძელი მათი შევსება. ჩერუვატით.
მომზადება ბევრი ასპექტის დასაკავებლად მის გამართვამდე: აუცილებელია შევძლოთ ასწავლოთ სტუდენტებს, რომლებსაც უკვე შეუძლიათ სწავლა, განახორციელონ სხვა საგნობრივი მოწოდებები, ახლებურად იყვნენ ისინი, სტუდენტის აშკარა ცოდნის საფუძველზე. , რომლებიც ყველა სპეციალობით ალკოჰოლური სასმელების, რომლებიც ახალი სტუდენტების მენეჯმენტი, vrahuvati სოციოლოგიური სასაწყობო პროცესის შექმნის, რომ მდიდარი. ამ ასპექტების ანალიზისთვის შენდება ერთი დაკავება. მერე მეორე, მესამე.
ტყავი ახალი განვითარების მეთოდებიდან უნდა განვითარდეს კვლევისა და განვითარების კონკრეტული აქტივობების, ასევე ეფექტური განვითარების გზების მიხედვით. არა ისეთი მეთოდების კლასიფიკაცია, როგორიც არის ნომენკლატურა, არამედ ზოგადსაგანმანათლებლო სკოლაში ახალმოსულთა ყველა განვითარების სისტემატიზაცია.
ბიბლიოგრაფიული სია
1. ბაბანსკი იუ.კ. ნავჩანიის პროცესის ოპტიმიზაცია: ზაგალნო-დიდაქტიკური ასპექტი / Babansky Yu.K .: Pidruchnik. - კ .: "ASV", 2008. - 227გვ.
2. ბაევი ს.ია. პროფესიულ სასწავლებლებში თეორიული და ვირუსული განათლების სისტემებისა და მეთოდების დიდაქტიკური საფუძვლები / Baev S.Ya. - SPb .: Lan, 2008 .-- 208s.
3. Bєlyaєva A.P. პროფესიული პედაგოგიკის მეთოდოლოგია და თეორია / ა.პ.ბულიავა. - SPb .: Lan, 2008 .-- 208s.
4. ბესპალკო ვ.პ. პედაგოგიკა და მეცნიერების პროგრესული ტექნოლოგიები / Bespalko V.P. პიდრუჩნიკი - მ .: გარდაიკა, 2008 .-- 368 გვ.
5. ბოგოლიუბოვი ვ.ი. პროფესიული მეცნიერება / ბოგოლიუბოვი V.I. //პედაგოგია. - 2009. - No13. - თან. 14-19
6. ჟელეზნიაკოვა OM პროფესია navchannya: ტექნოლოგიური ასპექტი / Zheleznyakova O.M. Pidruchnik - M .: Infra - M, 2008 .-- 664 გვ.
7. კლარინ მ.ვ. პედაგოგიური ტექნოლოგია / Klarin M.V. პიდრუჩნიკი - მ .: აკადემიური პროექტი, 2007 წ.-- 731გვ.
8. კრიკუნოვა თ.კ. პრაქტიკული პედაგოგიკა: ვიხოვნა რობოტი შუა სპეციალურ ნავჭალურ იპოთეკაზე / კრიკუნოვა T.K.: Pidruchnik. - მ .: გარდაიკა, 2009 წ.-- 225გვ.
9. ლევინა მ.მ. პროფესიული პედაგოგიური განათლების ტექნოლოგიები / Levina M.M.: Pidruchnik. - M: Velbi, 2007 .-- 480გვ.
10. ლეიბოვიჩი ა.მ. პროფესიული განათლების სახელმწიფო სტანდარტის სტრუქტურა / ლეიბოვიჩ ო.მ. - M .: Infra - M, 2008 .-- 406 გვ.
11. მორєვა ნ.ა. საშუალო პროფესიული განათლების პედაგოგიკა / Morova N.A.: Pidruchnik. - კ .: "ASV", 2008. - 227გვ.
12. მორєვა ნ.ა. პროფესიული განათლების ტექნოლოგია / Morova N.A.: Pidruchnik. - K .: Prosvitnistvo, 2008 .-- 175გვ.
13. პედაგოგიკა: თეორიები, სისტემები, ტექნოლოგიები: Pidruchnik / S.A.Smirnov, І.B. კოტოვა, Є.M. შიანოვი [ტა ინ]. - M .: Eksmo - Pres, 2006 .-- 560 წ.
14. პєტუხოვი მ.ა. პროფესიული და ტექნოლოგიური სისტემების სამეცნიერო ჩასაფრები და სპეციალური საგნების სწავლება / პєტუხოვი მ.ა. - K .: Vuzovskiy pidruchnik, 2009 .-- 313 გვ.
15. სამოუკინა ნ.ვ. ფსიქოლოგია და პედაგოგიკა პროფესიული შესრულება/ Samoukina N.V .: Pidruchnik. - M .: GEOTAR Media, 2007 .-- 640გვ.
16. სელევკო გ.კ. თანამედროვე საგანმანათლებლო ტექნოლოგიები. / სელევკო გ.კ. - K .: Prosvitnistvo, 2009 .-- 215გვ.
17. სემუშინა ლ.გ. Zm_st და Navchannya-ს ტექნოლოგია შუაში სპეციალური ნავჭალური დაპირებები / Semushina L.G .: Navch. სახელმძღვანელო მოსამზადებლად. დააყენეთ შუა. პროფ. საფარი. - M .: Infra - M, 2008 .-- 406 გვ.
დანამატია
ტესტი "მოერგება მანქანას"
Yaki მანქანები დაშვებულია ნებართვისთვის მაქსიმალური წონაკლასზე:
A. Legkovі
B. Vantazhnі
B. ავტობუსი
გ.ტრაქტორები
მანქანის გადაცემის ელემენტი:
B. ბორბლები
ვ.დვიგუნი
გ.კარდანი
დვიგუნის გარე აგებამდე უნდა იყოს:
B. მაგისტრალური
ვ.მახოვიკი
დვიგუნის დარტყმას ეწოდება "სამუშაო მოძრაობა", თუ:
A. დგუში იშლება BDC-დან TDC-მდე, შესასვლელი სარქველი ღიაა
B. დგუში იშლება TDC-დან BDC-მდე, შესასვლელი სარქველი ღიაა
B. დგუში იშლება TDC-დან BDC-მდე, შესასვლელი სარქვლის დახურვა
D. დგუში იშლება BDC-დან TDC-მდე, შესასვლელი სარქველი დახურულია
KShM-ის დეტალებში შედის:
A. Shiyki rozpodilchy shaft
B. კარბურატორი
V. Vkladish_ შემაერთებელი ღეროს საკისარი
D. გენერატორი
სანამ ცილინდრების ბლოკი უნდა განთავსდეს:
A. ცენტრიფუგა
B. დამწყები
V. რადიატორი
გ.ცილინდრი
დგუშის ჯგუფის დეტალებზე მიჰყევით:
A. თავი ცილინდრის ბლოკამდე
B. სარქველი
V. Stoporny kiltsya
G. Flywheel
დამაკავშირებელი ღეროს დეტალებზე ვრცელდება:
ო.ბობიშკი
B. ზედა თავის ბუჩქი
V. Stoporny kiltsya
გ.პისტონი
ბენზინის გამომუშავების მექანიზმამდე უნდა არსებობდეს:
ა დგუში
ბ.პროტივაგა
ვ.ქორომისლო
გ.პიდონი
დეტალებამდე სარქვლის მექანიზმიუნდა ეცნობოს:
A. ნაწილების ლილვის რაოდენობა
B. Rozpodilny shaft
B. გადაცემათა კოლოფი როზეტის ლილვის სამართავად
გ.ზაბზათა პაკ
დამოუკიდებელი გაგრილების სისტემის დაწყებამდე აუცილებელია:
ა გენერატორი
V. დამწყები
D. დამწვარი ავზი
რადიატორის ელემენტი:
ა.კრილჩატკა
B. ზედა ავზი
G. ბლაინდები
თერმოსტატის ელემენტი:
B. სარქველი
B. შემავსებელი კისერი
D. დაღვრაზე ჩამოსასხმელი
ანძათა სისტემის ელემენტი:
B. კარბურატორი
B. ცენტრიფუგა
დ ფანი
ზეთის ტუმბოს ელემენტი:
A. Olіyny რადიატორი
B. მაღალი ნაკადის ფილტრი
V. რადიო და სათაო განყოფილება
D. წნევის ლიანდაგი
ცენტრიფუგის ელემენტი:
B. რადიატორი
B. წნევის საზომი
დ ფანი
დიზელის სიცოცხლის სისტემის ელემენტი:
B. კარბურატორი
G. დამწყები
ცოცხალი სისტემის ელემენტი კარბურატორის ძრავაє:
ა გენერატორი
B. საქშენი
V. ეკონომიზატორი
კარბურატორის ელემენტი:
ა. დენის ფილტრი
ბ. ელექტრომაგნიტური სარქველი
ვ.დიფუზორი
გ.სმოლოსკიპნა სვ_ჩკა
ცხოვრების სისტემის ელემენტი ბენზინის ინექციიდან:
ა.ჟიკლერი
ბ.პოვიტრიანა ზალინკა
ვ.დროსელნა ზალინკა
გ.კარბურატორი
ელექტრომაგნიტური საქშენის ელემენტი:
ბ ზვოროტის სარქველი
გ.ჟიკლერი
გაზის სვეტის სახანძრო სისტემის ელემენტი:
ა ხელით კვების მნიშვნელობა
B. Vidstiynik
მეტი დოკუმენტი
სესხის აღების განხორციელების სხვადასხვა მეთოდების ანალიზი, საჩუქრის მიღების გზები VNZ-ში. ლაბორატორიულ-პრაქტიკოსი სტუდენტების ამ დიდაქტიკური ამოცანის როლი არის იმავე ასაკის სტუდენტებისგან პროფესიული ცოდნისა და უნარების აღება. ლაბორატორიული სემინარების მოწყობის ტექნოლოგია
რეზიუმე, დამატებები 07/03/2009
თეორიული ჩასაფრება სტუდენტთა უნარებზე ტექნოლოგიით ლაბორატორიულ-პრაქტიკული რობოტების მეთოდებით. Etapi vikonannya ლაბორატორიულ-პრაქტიკული რობოტები. Vіkovі სტუდენტების სპეციალობები. ტექნოლოგიური სახელოსნოს გეგმა-სინოფსისის შემუშავება.
რობოტის კურსი, დამატებები 10/30/2008
პრაქტიკული დასაქმების ციკლი. ჩატარების ფორმები პრაქტიკული მისაღებად. რობოტის ფრონტალური, ჯგუფური, ინდივიდუალური ფორმა. სხვა სკოლებიდან სესხის აღების ძირითადი ტიპები. ცოდნის გამოქვეყნება და სისტემატიზაცია. ლაბორატორიული დასაქმება საინჟინრო პროფილისთვის.
პრეზენტაცია, შემოწირულობები 22.01.2016წ
პოდლიტკას სპეციალობის მოტივაციური სფერო. დადებითი პოზიციის ჩამოყალიბება საწყის პროცესამდე. ეკონომიკიდან სკოლებში ლაბორატორიულ-პრაქტიკული რობოტების ჩატარების მეთოდოლოგია და ფორმა. პრინციპები, მეთოდები და მეთოდები სწავლის როგორ გავხდეთ მასწავლებელი ეკონომიკის გაკვეთილების ერთი საათის განმავლობაში.
რობოტის კურსი, დამატებები 18/10/2008
მოდერნიზაციის ძირითადი ფორმებისა და მეთოდების მახასიათებლები. პედაგოგები პრაქტიკულს ჩასაფრებენ. მიიღეთ მსმენელთა საგანმანათლებლო კომპეტენციის აქტიურობა პრაქტიკულ დაკავებაში. Viprobovannya ტუმბო შებოჭილობისთვის. პროფესიული ნავიჩოკის ფორმირება.
კურსის რობოტი, დამატებები 23/02/2015
პროფესიონალი დიზაინერისგან პრაქტიკული უნარების ჩამოყალიბების ოპტიმალური მეთოდები. პრაქტიკული სისტემა, რომელიც აიღო დიზაინიდან, რათა უზრუნველყოს სტუდენტების ნავიგაციის ფორმა. პერევაგის დიზაინერის ჩანაფიქრი უცხოური იპოთეკებიდან.
რობოტის კურსი, დამატებები 12/01/2015
ქიმიის შექმნის ტექნოლოგია. ნავჩანიას ჯგუფური მეთოდის თავისებურებები, რომლებიც იოგოს გაივლის. სემინარი არის საწყისი პროცესის ფორმა, მისი სტრუქტურა და დიზაინი. რივინა-ბაჟენოვის მეთოდოლოგიის მხარდასაჭერად პრაქტიკული სამუშაოების განხორციელება. ლაბორატორიული რობოტების ორგანიზაცია.
რეზიუმე, დამატებები 22/12/2011
დისციპლინის „მარკეტინგის“ საწყის-მეთოდური კომპლექსის განვითარებისა და გამკვრივების წესი. Vivchennya іstorії აგრობიზნესის დეპარტამენტის განვითარება და ეფექტურობა. ლექციების მომზადებისა და ჩატარების მეთოდები, ლაბორატორიული და პრაქტიკული ჩასატარებელი, სემინარები, іspitіv.
პრაქტიკიდან, შემოწირულობები 15.09.2017წ
სმენის ადამიანების პროფესიული მომზადების პრაქტიკულად დატვირთული ელემენტი FPS-ის შტაბ-ბინაში. ქცევის განსაკუთრებული მახასიათებელია ცეცხლოვანი სმუზის მიღება და პირველადი-ტრენუვალის კომპლექსში. განხორციელების მეთოდოლოგია არის სესხება PTS "ლავას" ძირითადი-ტრენუვალური კომპლექსიდან.
კურსის რობოტი, დამატებები 23/02/2015
ზრდა მცირდება მეცნიერებში ერთი საათი ლაბორატორიული და პრაქტიკული რობოტები ერთი საათის გაკვეთილები ბიოლოგიის. პრაქტიკული მეცნიერების განვითარებისა და განვითარების ტექნიკა მიკროსკოპის გამოყენებით და დროზე დაფუძნებული მიკროწამლის მომზადება საწყისი ექსპერიმენტის გონებაში.
მანქანები
ლაბორატორიული რობოტები
ხმა
1. ლაბორატორიული რობოტი No8 "The system of vivification dvigunіv vіd GBU"
2. ლაბორატორიული რობოტი No9 „Dzherelo strumu“ ……………………………………………… 8
3. ლაბორატორიული რობოტი No10 "ბატარეის გასროლა" ………………………………… 13
4. ლაბორატორიული რობოტი No11 „ტრანზისტორი აალების სისტემა“ ……………… ..… 19
5. ლაბორატორიული რობოტი No12 „სტარტერი“ …………………………………………………… 24
6. ლაბორატორიული რობოტი No13 „ელექტრული სქემები“ ……… .. ……………… .28
7. ლაბორატორიული რობოტი No14 „KIP“ …………………………………………………….. 32
8. ლაბორატორიული რობოტი No15 „განათლება, მსუბუქი და ხმის სიგნალიზაცია“ …………………………………………………………………………………………………… ………………………………………………………………………………………………………………………………………………… ………………….
9. ლაბორატორიული რობოტი No16 „Dodatkovo elektroustatkuvannya. ზაპობიჟნიკი ”……………………………………………………………………………………………………………………………………………………………………………… .41
10. ლაბორატორიული რობოტი No17 „Clutch“ …………………………………….
ლაბორატორიული რობოტი No8
თემა: "ცხოვრების სისტემა GBU-დან dvigun_v".
1.რობოტის გეგმა:
1. GBA და CNG რობოტის სქემატური დიაგრამა. 2. Vivchiti priznachennya, budovu რომ პრინციპი robotic RVD, RND. 3. განახორციელეთ RVS-ის მონაკვეთი RND-ზე.
4.Vivchit დეტალები, їkh დიზაინი, პრინციპი რობოტები, scho შესვლის საწყობში RVD, RND.
5. დეფექტურ ნაწილებზეა ეჭვი. 6. განახორციელეთ RVD, RND-ის დაკეცვა.
P. პრაქტიკული რობოტების ფლობა:
1. რედუქტორი: ND, U D.
3.ტექნიკური ლიტერატურა.
1. ნაკრესლიტი გბა-ს სქემა CNG-ზე.
2.Zrobiti roboche სავარძელი RVD, RND.
3.Მოკლე აღწერარობოტები RVD, RND.
4. უმნიშვნელოვანესი ნაწილების მახასიათებლის, მათი აგებულების მოკლე აღწერა.
მიამაგრეთ რობოტიკის რედუქტორის პრინციპი დაბალი ვიზა... RND - ემსახურება გაზის დაჭერის შემცირებას ატმოსფერულთან მიახლოებულ მნიშვნელობამდე. ეს იმდენად თავდაჯერებულია, რომ გადაადგილებისას საჭიროა გაზების გაჟონვა, მაგრამ ეს არ არის სწორი. რედუქტორი არის ორმხრივი მემბრანის მნიშვნელოვანი ტიპი. გადაცემათა კოლოფის პრინციპი იგივეა.
ტყავის ფეხები maє სარქველი 7 (სურ. 42, ა), რეზინის ქსოვილი
მემბრანა, მნიშვნელოვანი ნაწილების რაოდენობა 5, ჩამოკიდებული მემბრანა
სარქველი 7 და ზამბარა 6. Reducer 2 უსაფრთხოების ასევე ორი დამატებითი
მემბრანულ-გაზაფხულის ტიპის დანართები,
შესაბამისი გაზის ავტომატურად ხელახალი ჩაწერა zm_shuvach-ში.
მოძრაობისას, არასწორად და როდესაც სარქველი დახურულია, დაჭერა ცარიელ პირველ საფეხურზეამე - ატმოსფერული. როდესაც სარქველი ღიაა, ელექტრომაგნიტური სარქველი ჩართულია, გაზი ამოდის რედუქტორის პირველი ეტაპის ცარიელ ბოლოს (სურ. 42 ბ). გაზის დაჭერა დიაფრაგმაზე, ზამბარა 6-ის დამატებისას, იკეცება 5 ნაწილის რაოდენობაში, ხურავს სარქველს 7. გაზის დაჭერა რეგულირდება ღარებიში დამატებითი კაკალით 0,16 - 0,18 მპა. კონტროლი ხორციელდება წნევის მრიცხველით, რომელიც დამონტაჟებულია კაბინაში, სენსორით არის გაყვანილი და დამონტაჟებულია გადაცემათა კოლოფზე.
სხვა ეტაპის სარქველი II გადაცემათა კოლოფი გადაადგილებისას, მაგრამ არა რეალურად, ის დახურულია განლაგებული და დაჭერილია სავარძელზე ზამბარებით ბორბლის ლილვი.
ძრავის და პირველი რობოტის დაყენებისას ინსტალაციის შუაგულში გაზის რეგულატორის დამრტყმელ დემპერამდე იქმნება ვაკუუმი, მანძილი გადადის შემავალი მილსადენიდან ვაკუუმური გამომშვების ცარიელ სივრცეში B-ის ვაკუუმური დაცლის მეშვეობით. ეკონომიზატორი. ვაკუუმის გამოშვების სარქვლის დიაფრაგმა წევს გორაკზე და აწებება ბოლო ზამბარას, გამოიყოფა სხვა ეტაპის სარქველი, რის შედეგადაც სარქველი გაიხსნება. მეორე ეტაპზე გაზი ცარიელად შეინახება და 4-ე მილსადენში გადის.
XX რეჟიმში (42 ვ) დაბალ სიხშირეზე, ძრავის შემავალი მილების გამომშვები ამწე ლილვის შემოხვევა იცვლება, გაზზე ვიტრატი უმნიშვნელოა და ღვინის რაოდენობა მილის კიდეზე 8 XX მოძებნეთ გაზის დროსელური სარქველები zmіshuvach.
მაქსიმალურ წნევაზე (42გრ), როდესაც სასხლეტი სარქველები ხელახლა იხსნება, ვაკუუმი ძრავის შემშვებ კოლექტორზე არასაკმარისი ხდება ეკონომიის გარსის ზამბარის დასაწევად. მემბრანა იხრება, სარქველი იხსნება და გაზი ისევ ამოდის ეკონომიის საშუალებით.
გაზის მიწოდების გასაუმჯობესებლად ძრავის მოძრაობის საჭიროება
მილსადენები 3 და 4.
Პატარა. 41. დამუხტულ გაზზე გაზბალონური მონტაჟის სქემა:
1 - შლანგი შემავალი მილისა და ძრავისკენ; 2 - გაზის რედუქტორის კიდევ ერთი ეტაპი; 3 - ეკონომაიზერის დასაძინებელი პრიზმა; 4 - გაზის რედუქტორის პირველი ეტაპი; 5 - წნევის საზომი სენსორი; 6 - გაზის რედუქტორის ფილტრი; 7 - ჩამოსასხმელი zlivu rіdini-სთვის; 8 - ვიპარნიკი გაზისთვის; 9 - ელექტრომაგნიტური ფილტრის სარქველი; 10 - ცილინდრი დამუხტული გაზისთვის; 11 - ხედვის სარქველი გაზის მსგავსი (ორთქლის) ფაზისთვის; 12 - დამუხტული გაზის დონის რეგულატორის სენსორი; 13 - zapob_zhny სარქველი;
14 - vidatkovy სარქველი; 15 - სარეზერვო სისტემის სანთურის ავზი; 16 - საწვავის ტუმბო; 17 - გადართვის მილი
კარბუტერი; 18 - ერთკამერიანი კარბუტერი; 19 - კროსოვერი; 20 - ფილიალის მილი კარბუტერის დასამონტაჟებლად; 21 - ფილიალის მილი
აალებადი თანხების გამოშვება; 22 - გაზის სხეული zm_shuvach; 23 - განშტოების მილი დენის ადაპტერის დასამაგრებლად;
24, 25 და 26 - მილსადენები სასტარტო სისტემისთვის, უმოქმედო სისტემისა და ეკონომიურისთვის

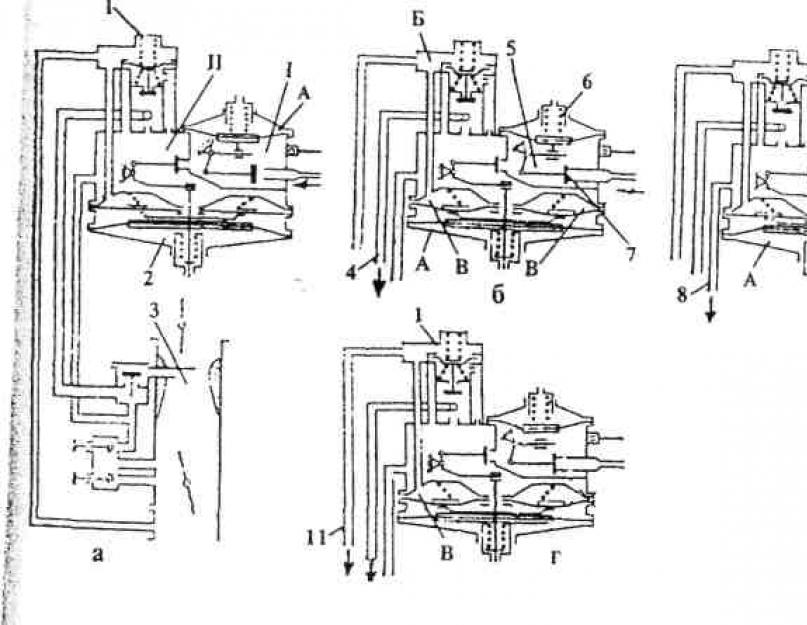
Პატარა. 42. ორსაფეხურიანი გადაცემათა კოლოფის რობოტის სქემა:
|a - დახურული ვდატკოვის სარქველით;ბ - იმ რობოტის დვიგუნას დაწყების საათამდესაშუალო navantazhennі-ით;ვ - რობოტის დვიგუნის pіd საათი უმოქმედო სიჩქარით;
r - at ძირითადად navantazhennі dviguna;
1~ გადაცემათა კოლოფის პირველი ნაბიჯები; 11 - სხვა გადაცემათა საფეხური; 1 - ეკონომიზატორი; 2- რედუქტორი; 3 - zm_shuvach; 4, 8 და 11 - ტუმბოს გაზის მიწოდების მილსადენები;
5 - ნაწილების რაოდენობა მნიშვნელოვანია; 6 - გაზაფხული; 7 - სარქველი; 9 და 10 - გარსები 1 და 11;
A - ატმოსფერული ცარიელი; B - ცარიელი ეკონომიზატორი;
B - ცარიელი ვაკუუმი rosvanazhuvach
Gazoviy zm_shuvach.
Гс - ემსახურება სბა-ს გაზის აღდგენის თანხების მომზადებას. Vidmіnnіstyu რობოტიკა GS კარბურატორისგან є ცეცხლის (გაზის) მიწოდება აგრეგატის წისქვილში. გაზი მიეწოდება გამონაბოლქვი აირის სარქველს საქშენის სარქვლის მეშვეობით. Შეანელე. გაზის კამერები მონაცვლეობით გადადის და დროსელის სარქველების მეშვეობით პირდაპირ დვიგუნის ცილინდრში. on XX ღვინო იკვებება სავენტილაციო პალატაში ორი რეგულირებადი ღიობის, როსტატოვანური კარადის დროსელის დემპერების მეშვეობით.
ცილინდრი გახეხილი გაზისთვის.
მოამზადეთ ფოლადისგან. დაზღვევა ვიცე 160 კგ/სმ. ახალ razmіschuyut: vidatkovy, ორთქლი, საშუალო, napovnuvalny სარქველი; სათადარიგო სარქველი და სენსორი დამუხტული გაზის დონის დასაბრუნებლად. ცილინდრი გახეხილი გაზისთვის.
მოამზადეთ ფოლადისგან. დაზღვევა ვიცეზე 160 კგ/დივ. ახალ razmіschuyut: vidatkovy, ორთქლი, საშუალო, napovnuvalny სარქველი; სათადარიგო სარქველი და სენსორი დამუხტული გაზის დონის დასაბრუნებლად.
ვიპარნიკი გაზისთვის.
გაზის ფაზიდან გაზის გასროლის დამტკიცების მნიშვნელობა არის აირისებრი. ალუმინის შენობა ინახება ორ ნაწილად. შიდა დაცლა თბება ერთი სისტემით და ძრავის გაგრილებით, რადგან გაზი ივსება, ამიტომ ის გადის სარქველებს.
ელექტრომაგნიტური სარქველი - ფილტრი.
საკინძების ვინტი კაბინის წინა სტროფზე. საწყობი შენობიდან, შეჭამა. მაგნიტი, ფილტრის ელემენტის სარქველით, რომელიც გამოიყენება ფიტინგების მიწოდებისა და მიწოდებისთვის. როდესაც ანთებული სარქველი ჩართულია, სარქველი იხსნება და მექანიკური სახლებიდან გასაწმენდად გაზი მიედინება ვიპარნიკში, რედუქტორში და ზმიშუვაჩში.
Visnovok: viconanoi რობოტიკის შედეგად დაინერგა GBU-ს რობოტიკის პრინციპი CNG-ზე, ასევე ND და VD გადაცემათა კოლოფების რობოტიკის პრინციპი.
ლაბორატორიული რობოტი No9.
თემა: "ძერელო სტრუმუ".
I. რობოტის გეგმა:
1. გენერატორის სქემატური დიაგრამა zminny struma.
2.რობოტის პრინციპული დიაგრამა აკუმულატორის ბატარეა.
3. Zrobiti chastkovo rozbirannya ცვალებადი სტრუმის გენერატორი.
4. შეამოწმეთ დეტალები, გადადით გენერატორის საწყობში.
5. განახორციელეთ გენერატორის დაკეცვა.
1 .ბატარეა 6CT ბატარეისთვის- 90 მ
2.ცვალებადი სტრუმის გენერატორი.
3.ტექნიკური ლიტერატურა.
1. ცვალებადი სტრუმის გენერატორის წრედის უკანა მხარეს.
2. გატეხეთ ბატარეის წრე.
3. შექმენით წინა უნივერსიტეტების მოკლე აღწერა, აგრეგატები.
4.ხატვა Viconan რობოტის შესახებ.
დატენვის ბატარეა.
შექმნილია გადარჩენილთა შტრიხთან საცხოვრებლად, თუ მოძრაობა არ არის პრაციუє ან პრაციუ მცირე სიხშირით, კოლინების შეფუთვა, ლილვი. იგი ინახება აკუმულატორების იგივე დანართების დეცილკოდან, ბოლოს და ბოლოს.
Diya yogo ეფუძნება ბოლო შესწორებულ ქიმიურ ენერგიას ელექტროს უკან (გამონადენი, ან დატენვა). მანქანებზე დამონტაჟებულია ტყვიის და მჟავა აკუმულატორის ბატარეები.
მანქანის აკუმულატორის ბატარეა ინახება 1 ავზში, დაყოფილია დანაყოფებით დამატებითი შენახვისთვის. კანის განყოფილებას (ბანკს) აქვს ერთი ბატარეა. ავზი დამზადებულია მჟავე პლასტმასისგან და ებონიტისგან. კანის ქილას აქვს 15 დადებითი და 13 უარყოფითი ფირფიტა.
ბატარეის სიმძლავრე იზომება ამპერებში / წელიწადში. დადებითი ფირფიტები ბოძზე ქინძისთავებით "-" ნიშნით. პოზიტიური ფირფიტა იშლება უარყოფითებს შორის, ანუ კიდევ ერთი, რაც უფრო დაბალია დადებითი. ფირფიტები მზადდება ერთიდან ერთი გამყოფებით 12, რომლებიც მზადდება სპეციალურად მოჭრილი ხისგან, მიკროფოროვანი ფირფიტისგან ან სკლოვოლოკნისგან. ბანკი დაცვის kryshkoyu 2, რომელშიც არის გახსნა ელექტროლიტით ბანკების შევსებისთვის. შემავსებელი ხვრელი იკეტება საცობით 4, სავენტილაციო ღიობის ღიობში (აკუმულატორის დაცლა არის ატმოსფერო).
ფეხით გადასასვლელებზე, scho z'udnuyut okremi ბატარეები, მითითებულია აკუმულატორის ბრენდის გამოშვების თარიღი, მაგალითად 6ST - 90M. ბატარეის ბრენდი უნდა იყოს კოდირებული შემდეგნაირად.
პირველი ციფრი 6 მიუთითებს ბოლო აკუმულატორების რაოდენობაზე, რომელიც არის ელემენტის სიმძლავრის ნომინალური მნიშვნელობის საწყისი წერტილი (12). ლიტერი, რომელიც მიჰყვება პირველ ციფრს, ნიშნავს, რომ ბატარეა დამწყებია. რიცხვებისთვის პირველი ასო (E) ახასიათებს ავზის მასალას - ებონიტს, გამყოფების სხვა მასალას: მიკროფოროვან პლასტმასს (M). მშრალი დამუხტული ბატარეები შეიძლება გამოყენებულ იქნას მაგალითად 3.
ერთი დამუხტვის საფუძველზე, მშრალი ტვირთის გადატანა უფრო მარტივია გადატენვის გარეშე. ბატარეის მაქსიმალური ვადა არ არის დამნაშავე სამი რაკეტის გადაკეთებაში.
ელექტროლიტი მზადდება აკუმულაციური სიროფის მჟავისა და გამოხდილი წყლისგან. მჟავა ტალღოვანი წყლით, podlivayu її თხელი ნაკადით. Spіvvіdnoshennya მჟავა და vodi in electrolіtі viznachayut for Yogo სქელი. ელექტროლიტების საწყობი კლიმატური გონებისგან.

Პატარა. 64. დატენვის ბატარეა:
ა - გარეგანი ვიგლიადი; ბ - ფირფიტების ბლოკი; v - ვიმიკაჩ "მასი" ჩანართები;
G - ვიმიკაჭ “მასი” ვიმკენო;
1 - სატანკო; 2 - კრიშკა; 3 და 6 - ბოძების ხაზები; 4 - დანამატი; 5 - წარმატებებს გისურვებთ
ჯემპერი; 7 - ვიმიკაჩი "მასი"; 8 - დიდი მარაგი; 9 - მალიუმი
მარაგი; 10 - ვიმიკაჩი "მასი"; 11 - დანაყოფი ბატარეის ყუთისთვის;
12 - გამყოფი; 13 - უარყოფითი ფირფიტები; 14 - zapob_zhny ფარი;
15 - დადებითი ფირფიტები; 16 - Vimikach ruchomy კონტაქტი;
17 და 18 - ვიმიკაჩის დაუმორჩილებელი კონტაქტები; 19 - კლანჭი ზამბარით

Პატარა. 65. გენერატორი:
ა - რობოტის დიაგრამა; ბ - prist_y; Г - როტორის გრაგნილი; 2 - როტორის მაგნიტი; 3 - ფუნჯი; 4 - კონტაქტი; ბეჭედი; 5 - vmikach primed; 6 - ამპერმეტრი; 7 - დიოდი; 8 - სტატორის გრაგნილი; 9 თა 12 - კრიშკი; 10 - როტორის ლილვი; 11 - სტატორი; 13 - შ_ტკოტრიმაჩ; 14 - სწორი ბლოკი; 15 - როტორი; 16 - გულშემატკივარი; 17 - შ_ვ
გენერატორი.
vantazhnyh მანქანებზე დააინსტალირეთ ცვალებადი ნაკადის სამფაზიანი გენერატორი უხეში კონტაქტებით. dvigun-ის გაშვებისას ბატარეიდან ჩანს შტრიხი, ხოლო რობოტის გაშვებისას - გენერატორიდან. Vypryamlyachі, scho კონვერტაცია strum ბოლო, ჩასმული შევიდა გენერატორი.
გენერატორი ინახება სტატორის 11-დან, როტორიდან 15-დან და პირდაპირი ბლოკიდან 14. სტატორის შიდა ზედაპირზე არის 18 ძელი, ტყავზე დატანილია გრაგნილი 8, რომელიც ინახება ხუთ ბრუნად.
მაგნიტური ველი იხსნება გრაგნილით 1 და თორმეტპოლუსიანი მაგნიტი 2, რომელიც მდებარეობს როტორში.
ენერგიული გრაგნილი ფიქსირდება როტორის ბუჩქებზე, ხოლო მავთულები მიმაგრებულია საკონტაქტო რგოლებზე 4. ენერგიული გრაგნილი ენერგიით იკვებება აკუმულატორის ბატარეიდან ანთებული ვიმიკახის, დაძაბულობის რეგულატორის, ფარების 3 და 4 კონტაქტის მეშვეობით.
როდესაც გენერატორის როტორი შეფუთულია, როტორის მაგნიტურ ველს აჭარბებს მისი ელექტროგადამცემი ხაზები, სტატორის გრაგნილის 8 გამტარები და მათში ცვალებადი ელექტრული შტრიხია ინდუქციური, ისე, რომ იგი უახლოვდება ვიპრიამლიაჩს. აკონტროლეთ გენერატორის რობოტი დამატებითი ამპერმეტრით 6.
რეგულატორი ზამბარებისთვის. Zastosovuєtsya მიიღოს გენერატორი, როგორც გადახვევა. მანქანებზე, vicoristovuyut უკონტაქტო - ტრანზისტორი რეგულატორი. ახალ კონტაქტებში შესაძლებელია დაჟანგვა და ამიტომ რობოტი ძალიან კარგია. რეგულატორი ინახება მარეგულირებელი და ვიმირიუვალური დანართებიდან.
Vimіryuvalny ელემენტი - stabilіtron, რომელიც keruє სამი ტრანზისტორი. გამავალი ტრანზისტორი ცვლის გენერატორის გრაგნილის გრაგნილის შუბის ძალას და თავისთავად იკვებება გენერატორში მოცემულ საზღვრებში.
Visnovok: რობოტის პროცესში, გენერატორი აწყობილი და დაკეცილი იყო, განისაზღვრა უნივერსიტეტის ძირითადი ნაწილების იდენტიფიკაცია.
ლაბორატორიული რობოტი No10.
თემა: "ბატარეა ანთებულია."
1.რობოტის გეგმა:
1. ბატარეის აალების სქემატური დიაგრამა.
2. Vivchity priznachennya, budovu pererivnik-rozpodilnik-ის რობოტიკის პრინციპი, გაშეშებული კატა, sv_chki zapalyuvannya.
3. შერჩეული უნივერსიტეტების შერჩევა.
4. დეტალების ნახვა.
5. განახორციელეთ სისტემის დაკეცვა.
II ... პრაქტიკული რობოტების ფლობა.
1. Pererivnik - rozpodilnik, კატის ნაგავი, sv_chka zapalyuvannya. 2.ნაბირი საჭირო იარაღები... 3.ტექნიკური ლიტერატურა.
III ... ფორმა არის Viconan რობოტის შესახებ.
1.შექმენით ყველაზე მნიშვნელოვანი უნივერსიტეტების სქემა (pererivnik-rozpodilnik, sv_chka zapalyuvannya, kotushka zapalennya). 2. ბატარეის აალების სქემატური დიაგრამა. 3. პერერივნიკის მოკლე აღწერა - როზპოდილნიკი, მთავარი უნივერსიტეტი. 4. მოკლედ აღწერეთ რობოტული სისტემების პრინციპი. 5. Visnovok Viconan რობოტის შესახებ.
კარბურატორის dvigun-ის ცილინდრებზე სამუშაო ხმაური მჭიდროა, რათა აანთოს ეკრანიდან, რომელიც დამკვიდრებულია სანთელზე. სანთლის გასახსნელად, საჭიროა შტრიხი მაღალი წყაროები, რომელიც შეპყრობილია სისტემით და ბატარეის აალებადით.
ბატარეის სისტემას აქვს ორი ფლაკონი: დაბალი და მაღალი. ლანციუგას დაბალ ზამბარებზე ბატარეები ბოლოს ჩართულია 1, ვმიკაჩ 3 ანთებულია, პირველი გრაგნილი არის 4 ქვაბი ანთებულია, პერერივნიკი 8;
როცა აალდება, დახურული კონტაქტები pererivnik ელექტრო strum საწყისი აკუმულატორი ბატარეები ან გენერატორი მისვლა პირველადი გრაგნილი coil გასროლა up, შექმნის მაგნიტური ველის ახლოს. მაგნიტური ველი აჭარბებს ანთების კოჭის მეორადი გრაგნილის მოხვევებს და მიმართავს მას EPC-ზე. მეორადი გრაგნილი ზამბარებისა და 20 - 24 კვ მიღწევის ბოლოებზე მობრუნების დიდი რაოდენობით. დალიეთ შტრიხი მაღალი წყაროების ცენტრალური მილის გავლით, ვარდი, ღერო ადის სისხლის სანთლებისკენ.
საქვაბე იწვება ფოლადის კორპუსიდან 8, ბირთვიდან 4, პირველადი და მეორადი გრაგნილიდან, კარბოლიტის გალიიდან 2 და დამატებითი რეზისტორიდან. მოკლე ჩართვა - ტრანსფორმატორი ფოლადის ბირთვზე є მეორადი გრაგნილი 5 და მის თავზე - პირველადი გრაგნილი 6. მათ შორის არის საიზოლაციო მილი - ბირთვსა და მეორად გრაგნილს შორის, ხოლო გრაგნილების ბურთებს შორის - საიზოლაციო ქაღალდი. . Viconan-ის პირველადი გრაგნილი არის მყარი იზოლირებული შუა ისრისგან - 0,8 მმ (დიამეტრი). მეორადი გრაგნილი მაє 18,000 - 20,000 წვრილი დარტის მობრუნება - 0,1 მმ (დიამეტრი). Kintzi პირველადი გრაგნილი vivedeni on kintzi (zatiskachi) 1 carbolic crush. ვიკონანის ბირთვი არის სატრანსფორმატორო ფოლადის უხეში, ხოლო ინსტალაციის დასასრული არის ფაიფურის იზოლატორიდან 9.
Pererivnik - rozpodilnik (დისტრიბუტორი) - აუცილებელია pererivannya struma დაბალი დაძაბულობის და rozpodil struma მაღალი დაძაბულობის. 8 პერერივნიკის კონტაქტები დეპონირებულია ცეცხლგამძლე ლითონით - ვოლფრამი. პერერივნიკის რუქომიული კონტაქტი უნდა გაწუროთ მანამ, სანამ ის არ არის მოსახერხებელი ხშირი ზამბარით.
შემოსევის კამერა 6 დარტყმით შემოახვიეთ გადასვლის მნიშვნელობის იზოლაციებზე და გამოშვების ერთი რევოლუციისთვის განვითარებულია სტილის კონტაქტი, მუშტებზე დარტყმების რაოდენობა და შესაბამისი რაოდენობის რაოდენობა. ძრავის ცილინდრები. ზემოთ, როზეტის კორპუსზე, როტორი ინახება როტორ 4-დან და როტორი დამზადებულია კარბოლიტისგან, ხოლო ზემოდან იგი დამონტაჟებულია ახალ საკონტაქტო ფირფიტაში. კამერაზე დამაგრების ტიპი. კრიშკა ასევე კარბოლიტოვაა. ვიკონიის პირველ ნაწილში დგას 2 ბუდე ბუქსირებით მაღალი წყაროების ისრებისთვის სანთლების გასანათებლად. კრიშკას ცენტრში არის ცენტრალური ბუდე ცენტრალური ისრის დასამონტაჟებლად KZ-დან მაღალი მიმართულებით.

Პატარა. 66. ბატარეის აალების წრე:
1 - დატენვის ბატარეა; 2 - ვმიკაჩის შემქმნელი; 3 - vmikach primed; 4 - პირველადი გრაგნილი; 5 - მეორადი გრაგნილი; 6 - ქვაბი ანთებულია; 7 - ვარდის ხე; 8 - პერერივნიკი; 9 - კონდენსატორი; 10 - ანთებული სანთელი
შუაში, შენობის ცენტრალური ბუდესთან, არის ვუგილიური კონტაქტი 3 ზამბარით როტორის ფირფიტაზე დასამაგრებლად, ხოლო კანის ბუდესთან ფხვიერი კონტაქტის რაოდენობისთვის.
როტორის როტორი, მუშტიდან ერთბაშად გახვეული, სხვათა შორის, დაკავშირებულია ერთ კონტაქტთან (ცენტრალურთან), რომელიც აწვება სტრიქონს სანთლებს. კამერა 6 დაკავშირებულია წამყვანი როლიკებით 11. როლიკერი შემოხვეულია როზეტის ლილვის გარშემო.
ნაპერწკლის სანთელი გამოიყენება კამერაში არსებული უფსკრული აალების დასაყენებლად, ელექტრული ნაპერწკლის გამოტოვებისთვის. დანამატი ინახება კორპუსში 5, ცენტრალური ელექტროდი 8 იზოლატორით 2 და ბიტი ელექტროდი 9, შედუღებული დანამატის სხეულზე. ახალ ვიკონანოს აქვს ნაწილი, რომელიც ხრახნიანია ცილინდრების თავში. სვიტკას ზედა ნაწილში არის გასაღების კიდე. დიდი ღირებულებარობოტული კონცენტრატორებისთვის არის უფსკრული ცენტრალურ და ელექტრო ელექტროდებს შორის. ნომინალური ნომინალური შეწყვეტა დანამატის ელექტროდებს შორის 0.7 - 0.9 მმ. Yogo zm_nuyut prognannya გვერდითი ელექტროდი.
დაამაგრეთ სისტემა და აალება: ცენტრირების რეგულატორი: უზრუნველსაყოფად, რომ წონები 19 პორტებზე, რომლებიც ანაცვლებენ ფირფიტას 9, ირიბი გამონაზარდებით. გადახვევის სიხშირის მატებასთან ერთად, რეგულატორის წონის ლილვი შორდება და წონების ქინძისთავები, რომლებიც მოძრაობენ ფირფიტების პროგნოზებზე, აბრუნებენ კამერას მავთულის როლიკერის შესახვევის მხარეს. შედეგად, კამერა კარგავს კონტაქტს გადამყვან მოწყობილობასთან და სანთელი უფრო დიდი ხდება.
ვაკუუმის რეგულატორი - ემსახურება როგორც შემცვლელი გველგესლას zapalyuvannya, რომელიც ამოწურულია navantazhennya ძრავისგან. დვიგუნის ინსტალაციის ცვლილებით დროსელის სარქველიდასამალად და მოგზაურობისას, დიაფრაგმა მოძრაობს მარცხნივ ბიძგით და აქცევს პერერივნიკის დამსხვრეულ ფირფიტას კამერის სახვევში. კოტ ოპერები, ანთებული. გამოჯანმრთელდი. როდესაც დროსელი იზრდება, დროსელის ფლაკონი იხსნება, დიაფრაგმა იხსნება მილებში და დიაფრაგმა ცვლის ბიძგს დასაკეცი დისკიდან ბიკზე, რამაც შეცვალა ჭრილი.
ოქტანი არის კორექტორი. მე გადმოვცემ zm_ni kuta viperedzhennya-ს მნიშვნელობებს პალივას ოქტანური რიცხვის საბადოებში, ლილვის, ლილვის ბრუნვის უკან +/- 12 °-ის საზღვრებში.
Visnovok: ასეთ რანგში არის სამი დანართი დისტრიბუტორის როზეტისთვის, არის სამი დანართი: კამერის ბრუნვის ცენტრალიზებული კონტროლი, მბრუნავი დისკისთვის ვაკუუმის რეგულატორი;

Პატარა. 69. Iskrova sv_chka zapalyuvannya:
nakinechnik; 2 - იზოლატორი; 3 - დაფარული|> ომკა; 4 - შუასადებები; 5 - საქმე; U ~ დაგება; 7 - თევზის ნაწილი კორპუსისთვის; YR-ცენტრალური ელექტროდი; 9 - ელექტრო ელექტროდი

Პატარა. 67. Coil ანთებული:
1 - vivіdnі zatiskachі; 2 - კრიშკა; 3- დამატებითი რეზისტორი; 4 - ბირთვი; 5- მეორადი გრაგნილი; 6 - პერვინნაგრაგნილი; 7 - იზოლაციის მილი;8 - საქმე; 9 - ფაიფურის იზოლატორი; 10 - ტრანსფორმატორის ზეთი; 11 - K_ltseviy მაგნიტოგამტარი

Პატარა. 68. პერერივაჩ-როზპოდილნიკი:
ა - როზმარინი; ბ - პერერივნიკი,
в - viperedzhennya zapalennya-ს vidcentrovy მარეგულირებელი;
1 - კრიშკა; 2 - zatiskach; 3 - ცენტრალური კონტაქტი; 4 - როტორი; 5 - მნიშვნელოვანი;
6 - კამერა; 7 - rukhomiy საკონტაქტო pererivnik; 8 - არახმოვანი კონტაქტი;
9 - კამერის ფირფიტა; 10 - საქმე; 11 - როლიკებით; 12 - მარეგულირებელი თხილი;
13 - ოქტანის კორექტორის ფირფიტები; 14 - ზეთის ქილა; 15 - რუქომიის დისკი;
16 - გაზაფხული; 17 - ვაკუუმის რეგულატორი viperedzhennya გასროლილი;
18 - დიაფრაგმა; 19 - წონა
ლაბორატორიული რობოტი No11
თემა: "ტრანზისტორის ანთების სისტემა".
I. რობოტის გეგმა.
1. კონტაქტ-ტრანზისტორი აალების სისტემის სქემატური დიაგრამა.
2. უკონტაქტო - ტრანზისტორი სისტემის პრინციპული წრე და ანთებული.
3. განახორციელეთ კანის სისტემების დასაკეცი და კრეფის მონაკვეთი.
4. დაიწყეთ სისტემა.
1.სახანძრო სისტემები.
2.იარაღების ნაკრები.
3.ტექნიკური ლიტერატურა.
III ... ფორმა არის Viconan რობოტის შესახებ.
1. აღწერეთ რობოტული კონტაქტის პრინციპი - ტრანზისტორი აალების სისტემები.
2. ნაკრესლიტის სქემა BKTSZ.
3.აღწერეთ უკონტაქტო - ტრანზისტორული რობოტიკის სისტემების პრინციპი.
4.სქემის დაცინვა.
5. Viyaviti vіdminnostі სისტემები.
ტრანზისტორის აალების ორი ტიპი არსებობს: კონტაქტური და უკონტაქტო. კანი თავისი პასაჟებით და ნაკლოვანებებით.
კონტაქტი - ტრანზისტორი ანთების სისტემა. აკუმულატორის აალების სისტემა ადვილად ასაწყობია, ასე რომ თქვენ დიდი ხანია გაჭედილი ხართ მანქანებზე. თუმცა, მისი სუტა ხანმოკლეა: პერერივნიკის კონტაქტები ადვილად გადადის პიდგორიანიას მეშვეობით. თანამედროვე მანქანებზე ხშირია შემთხვევა, როცა აალებადი სისტემა ტრანზისტორების საცავიდან იშლება, რადგან ის იკეცება ბატარეისთვის და არის არაერთი მავთული. ტრანზისტორი სისტემა ანთებს ანთებას ეკონომიური რობოტიმაღალი ბრუნვა, bagatocylindrovyh dvigunіv іf ნაბიჯ-ნაბიჯ შეკუმშვა.
კონტაქტურ-ტრანზისტორი ანთების სისტემა გამოსახულია ბატარეით მომუშავე გადამრთველის სახით, რომელიც ციმციმდება დისტანციური მართვის კონტაქტებსა და ანთებას შორის.
კომუტატორი; შეკრებები ნეკნიან კორპუსში, რომელიც დამზადებულია თუთიის შენადნობისგან. KTSZ სქემა წარმოდგენილია მალუნკას მიერ.
ტრანზისტორის ჩამრთველი მუშაობს ორ რეჟიმში: 1 კონტაქტი დახურულია, გადამრთველის წრე ღიაა სტრიქონი მოკლე ჩართვის პირველად გრაგნილზე გადასასვლელად. 2 - ჩამრთველის წრე დახურულია, გადამრთველის კონტაქტები ღიაა. ცოტ-ცოტაზე ბილიკები სტრუმისკენ მიიმართება.
როდესაც საქმე ეხება პირველად გრაგნილს მე-3 ტრანზისტორის მეშვეობით, მეორად ფარანს უბიძგებს დაახლოებით 25%-ით, რაც საშუალებას აძლევს ელექტროდებს შორის უფსკრული გაისროლოს 1-1,2 მმ-მდე, თუ ცილინდრს ისევ ჩართავთ. სიხშირის შეფუთვა კოლინვალი. მკაცრი іskri-ს მენეჯერები აწვებიან ძრავის დაწყებას და ზრდის მის ეკონომიას.
კომუტატორის იმპულსური ტრანსფორმატორი ვიკორისტოვუცია ტრანზისტორის მკაფიო და სწრაფი გადარევის უზრუნველსაყოფად. რიზკე ნაკადის ცვლილება პირველ გრაგნილში 3 ქვაბი გააქტიურდა მაღალი ძაბვის დაწყებამდე მეორე გრაგნილ 2-ში. თუმცა, დინების ცვლილება პირველ გრაგნილში პირველ გრაგნილში ახალ გადასასვლელში EPC თვითმმართველობისთვის. ანთება, U > 100 U, იქნება ზენერის დიოდის რღვევა და გრაგნილი კოჭის პირველადი გრაგნილის ზენერ დიოდის დიოდით.

Პატარა. 70. კონტაქტურ-ტრანზისტორი სისტემის და აალების სქემა:
1 - ანთებული სანთელი; 2 - მეორადი გრაგნილი; 3 - პირველადი გრაგნილი; 4 - სტაბილიტრონი; 5 - დიოდი; 6 - კონდენსატორი; 7 - რეზისტორი; 8 - ტრანზისტორი; 9 - იმპულსური ტრანსფორმატორი; 10 - პერეივნიკის კონტაქტები; 11 - კამერა;
12 - დოდატკოვის რეზისტორი; 13 - ვმიკაჩ ანთებული; 14 - ამპერმეტრი;
A - კატა გასროლილი; B - კომუტატორი; B - pererivnik-rozpodilnik;
G - დატენვის ბატარეა;
Პატარა. 71. უკონტაქტო ტრანზისტორი აალების სისტემა:
ა - წრე იკვებება;ბ - ვარდის სენსორი; v - სენსორ-როზეტის ნაწილები;
g - როტორის როტორის როტორი; 1 - ანთებული სანთელი; 2 і 12 - მაღალი წყაროების ისრები; 3 - ელექტრო როზეტის ელექტროდი; 4 - როტორის როტორი; 5 - სენსორის სტატორის ბირთვი; 6 - სენსორის სტატორის გრაგნილი; 7 - სენსორის როტორი; 8 - ტრანზისტორი; 9 - ანთების კოჭის პირველადი გრაგნილი; 10 - მეორადი გრაგნილი; 11 - როტორის მაგნიტური ბეჭედი; 13 - ვმიკაჩ ანთებული; 14 - კარაქი; 15 - vivedennya სტატორის გრაგნილი; 16 - ვაკუუმის რეგულატორი; 17 - როზაცეას კიბოსნაირნი; 18 - ლილვი; 19 - კლიპის ფირფიტები; 20 - დისკები-მაგნიტური გამტარები; 21 - სტატორი; 22 - მიკი
უკონტაქტო - ტრანზისტორი ანთების სისტემა. Vona შესაფერისია კონტაქტ-ტრანზისტორი სისტემისთვის, მხოლოდ ამ ტრანზისტორის კონტროლი არ არის დაკავშირებული კონტაქტის გადამრთველის საშუალებით, არამედ დამატებითი მაგნიტოელექტრული სენსორის უკან.
მაგნიტოელექტრული ზარის სენსორი, პერერივნიკ-ვარდის მსგავსი, ალე და რამდენიმე სინათლეზე. სენსორის სტატორი 21, რომელიც წარმოადგენს შეცვლას, დამაგრებულია საყელოს ფირფიტაზე, რომელიც სპირალურად ტრიალებს საკისრზე და უკავშირდება რეგულატორის ვაკუუმურ ბიძგს. სტატორის გრაგნილი 6 დაწყობილია გალიაში, ფიქსირდება ფირფიტებით 19, რომლებიც მოქლონილია ისე, რომ კბილები - კანის ფირფიტის მაგნიტური გამტარები შედიან კბილებს შორის არსებულ ხარვეზებში - პირობა. გრაგნილის ერთი ბოლო დაკავშირებულია "მასოიუსთან", ხოლო გარსაცმის გრაგნილების იზოლაციით - კომუტატორის 8 ტრანზისტორთან.
სენსორის 7 როტორი არის 16-პოლუსიანი მაგნიტი, რომელიც გადადის 18-ის ირგვლივ შეფუთვაში ცენტრის რეგულატორის მეშვეობით. როტორის რგოლის 11 მაგნიტად გამოსაყენებლად, ბოლოებამდე - რომლის პოლუსებზე მთლიანად დაჭერილია დისკები - მაგნიტური გამტარები 20.
სუნი მრგვალი, დიდი პოლუსიანი მაგნიტია. როტორის როტორი (4) დამონტაჟებულია სენსორის თავზე.
როდესაც როტორის როტორი შეფუთულია, ერთ-ერთი მაგნიტური პოლუსი გადის სტატორის ბირთვში 5 და EPC ინდუცირებულია გრაგნილში 6. თუ გამტარ გარდამავალი ბაზიდან გამოსვლა მარტივია - ტრანზისტორი კონდენსატორი 8, მაშინ გრაგნილი იწყებს დინებას შეტევითი ლანცეტის გასწვრივ "+" ბატარეა - ვიმიკაში ანთებული 13 - პირველადი გრაგნილი 9 - გარდამავალი კოლექტორი - ტრანზისტორი - ტრანზისტორი ...
თუ გაბრაზებული ხარ 5, შეტევის ბოძს გადასცემ ინშოის პოლარობის როტორის მაგნიტს, გრაგნილ 6-ში ისევ EPC იქნება გამოწვეული და არა პირდაპირ. ტოდი ტრანზისტორი დახურულია და ელექტრული ღეროს შუბი იხსნება, გადის ანთების კოჭის პირველადი გრაგნილით. ამისთვის მეორე გრაგნილში გამოწვეულია მაღალი დონის EPC, რადგან ის მიემართება ცქრიალა ნაპერწკალამდე.
ერთი გამოვლენისთვის აუცილებელია, რომ სტატორის ბირთვმა გაიაროს როტორის ორი პოლარიზებული კბილი, ამიტომ ბოძების რაოდენობა ორჯერ მეტია ძრავის ცილინდრების რაოდენობაზე.
Visnovok: კონტაქტური სისტემის ხედზე და გასროლილზე, უკონტაქტო კონტროლი არ აკონტროლებს კონტაქტების ყურს, არამედ ციმციმის არევის მომენტს, რაც მიუთითებს როტორის წინა მხარეს დაყენებული პატჩი 22-ზე.
ლაბორატორიული რობოტი No12
თემა: "დაწყება".
I. რობოტის გეგმა.
1. რობოტული დამწყებლის სქემატური დიაგრამა.
2. განახორციელეთ სტარტერის rozbyrannya dvigun ZIL - 508 მონაკვეთი.
3.ვივჩიტის დეტალები, їkh დიზაინი, რობოტიკის პრინციპი.
4. განახორციელეთ სტარტერის დაკეცვა.
II ... შექმენით პრაქტიკული რობოტები.
1. სტარტერი dvigun ZIL - 508.
2.გასაღებებისა და ხელსაწყოების ნაკრები.
3.ტექნიკური ლიტერატურა.
III ... ფორმა არის Viconan რობოტის შესახებ.
1. დამწყებ რობოტის აღწერა.
2. წევის რელე., წევის რელე რობოტის აღწერა.
3. უფრო მტკიცე ვიდრე დამწყებ სავარძელი.
4. რობოტის წრედის აღწერა.
5.დისკის მაფის აღწერა.
b.Visnovok რობოტის ვიკონანის შესახებ.
შემქმნელი. ზაგალნი აღწერს.
სანამ ჩვენ ვცხოვრობთ ელექტროენერგიის მიწოდებაზე, სტრიუმის ძალა უნდა იყოს გამარჯვებული დამწყებთათვის.
კარბურატორის ძრავის Nad_yny გაშვება შესაძლებელია, როდესაც ლილვი შეფუთულია 1-1,3 წმ სიხშირით. 1 (60 - 80 xv "1 ). Zdobuttya ასეთი სიხშირის შეფუთვა მე გადავცემ ვიდიას მნიშვნელოვანი zusil. რობოტის განთავსებისთვის ელექტრო დამწყები უნდა შეწყდეს გაშვების საათამდე.
დამწყები არის პოსტ-სტრუმის ელექტროძრავა დახურული მუშაობის ბოლო გააქტიურების და ბატარეის ელექტროენერგიის მექანიკურად გადაქცევის შემდეგ. დამწყებ პრიზმა ნაჩვენებია ნახ. 72.
შეახვიეთ არმატურის ლილვი ბრინჯაოს ბუჩქებთან. იოგოს ღარში, გრაგნილი სექციების წვეტი იდება ერთი ხაზით. ტყავის მონაკვეთის კინწის ნაკერი მიმაგრებულია კორექტორის 12-ის ფირფიტებზე, რომლებიც ზამბარებით არის დაჭერილი ზამბარებით, ორ მათგანს აწყობენ „მასოიუ“, ხოლო ორს - გრიგალის ბოლოს. გრაგნილის პირველი ბოლო გაძლიერებულია წევის რელეს დაჭედვამდე.
წევის რელე ინახება ბირთვიდან 7 ამობრუნებით და 8 გრაგნილით და დასაკეცი ბირთვით 6, რომელიც დაკავშირებულია მექანიზმთან 4 დისკთან.
დამწყები ჩასმულია წვრილმანში გასაღებით, შემდეგ ჩასმულია აალების საკეტში (72, ბ) საკეტის კონტაქტებამდე, გადადის ისრები გრაგნილიდან, რომელიც შემოდის და ბატარეა.
Dvigun დაწყება, zamikayuchi lantsyug გრაგნილები, მე ჩავხატავ. გრაგნილი, რომელიც იწევს შიგნით, როდესაც გადის არასამყაროში, მაგნიტიზებს ბირთვს, რომელიც იზიდავს დანგრეულ ბირთვს შუაში. ერთ ბოლოში რჩება გადაცემათა ბორბლის 4-ის მნიშვნელობა ამძრავისთვის, დამწყებლის ჩასმა კლატჩში მფრინავის ხრახნით, ხოლო ბოლოთი, საკონტაქტო დისკის მეშვეობით 9, ბლოკავს ბატარეის შუბს. ორი მაგნიტური ველის ურთიერთგაცვლის შედეგად (ერთი გამაძლიერებლის გრაგნილშია გაჭედილი, მეორე კი არმატურის გრაგნილში) შეკეთებულია დამწყებ არმატურის სახვევები, რომლებიც ამოძრავებს გადაცემათა ბორბალს და ნაწილების რაოდენობას. ლილვი. დასაკეცი ბირთვის 6-ის გამკაცრებისთვის, ჩართული გრაგნილი 8 ემსახურება, იაკა იჭრება ერთ ბიკში, რაც, თუმცა, შეინარჩუნებს ყველა ამ მაგნიტური ნაკადის სისწორეს.
ძრავის ამოქმედების მომენტში, გადაცემათა ბორბალი შეკეთებულია ამძრავამდე, რათა შემობრუნდეს მფრინავის ბოლოსკენ და დაიხუროს გადაბმულობის არმატურის ლილვის უკან.
გადაბმული გადაადგილებისას ხელს უშლის დამწყებ არმატურის შენელებას ძრავის ჩართვისას, ხოლო ძრავის ჩართვისას იგი გადააქვს შეფუთვას მხოლოდ ერთ ბიტში: დამწყებ არმატურის ლილვიდან სასტარტო მექანიზმამდე ძრავამდე.

Პატარა. 72. შემქმნელის ძრავა ZIL-508:
a - prist_y; 6 - დამწყებ გაყვანილობის დიაგრამა; v - მოყვება obg_nna clutch;გ - obg_nn vimknen დაწყვილება;
1 - მექანიზმი დისკზე; 2 - წამყვანი clutch; 3 - ბეჭედი ზამბარა დისკზე; 4 - მნიშვნელოვანია დისკისთვის; 5 - გაზაფხული; 6 - წევის სარელეო ბირთვი; 7 - გრაგნილი, ვხატავ; 8 - გამკაცრება გრაგნილი; 9 - საკონტაქტო დისკი; 10 - გრაგნილის შებრუნების გამკაცრება; 11 - დარტის დაჭერა აკუმულატორის ბატარეიდან; 12 - კოლექციონერი; 13 - სტატორის ენერგიული გრაგნილი; 14 - იაკირი; 15 - დამწყებ საცხოვრებელი; 16 - მფრინავის ხრახნი; 17 - როლიკებით; 18 - დგუში; 19 - zovnishnya კლიპი; 20 - შიდა კლიპი;
B, K, KZ, SG, PR და AM - Zatiskachі აკუმულატორის ბატარეები; მოყვება სარელეო ქვაბები; ქვაბები zapalyuvannya, სტარტერი, zapobizhnik და ამპერმეტრი
როდესაც ვიდეო კლიპი შეფუთულია, კლიპის ნაწილი გადადის ვუზკაზე კლიპზე გახეხვისა და დამაგრების შედეგად. ასეთ stanі აქვს დამჭერი, რათა შემოიხვიოს shaft yak tsіle.
ძრავის გაშვებისას, არმატურის ლილვის შეფუთვის სიხშირე იზრდება მფრინავის რეჟიმიდან მექანიზმამდე. არმატურის ლილვის გახეხვის ძალის მეშვეობით, ლილვაკები აწიეთ ღარების გაფართოებულ ნაწილში. ამ რანგში წყვილმა წმ. ვარდების დარტყმა '' წევს არმატურის ლილვს მექანიზმიდან ძრავამდე.
ძრავის დასაწყებად, ჩართოთ გასაღები zvorotny bik, გრაგნილის შუბი იკეცება, ფართოვდება, ბირთვი მაგნიტიზებულია და გადაცემათა ბორბალი 1 ამოძრავებს არმატურის 3 ზამბარიდან მიდის მფრინავზე.
ვიზნოვოკი: რობოტების დაშინების მსვლელობისას ვივჩენი იღვიძებს, ძირითადი უნივერსიტეტების პრინციპი და სტარტერი ZIL - 508-ის ნაწილები აღიარებულია.
ლაბორატორიული რობოტი No13.
თემა: „ელექტროენერგეტიკული სქემა“.
I. რობოტის გეგმა.
1. ნაკრესლიტი, ვივჩივუ ვივჩივვ ვვიჭლივუ მანქანის ელექტრული წრე.
2. გააცოცხლეთ მანქანის ძირითადი ელექტრული დანართები (ანთება, სიგნალიზაცია, ელექტრო მანქანები, წვეთები, KVP).
3.ვივჩიტის ელექტრული დანადგარის dzherel strumu-სთან შეერთების განვითარების მეთოდები.
II ... შექმენით პრაქტიკული რობოტები.
1. ავტომობილი VAZ-2102.
2.ტექნიკური განათება - რა.
3.საჭირო იარაღების ნაკრები.
III ... ფორმა არის Viconan რობოტის შესახებ.
1. სატრანსპორტო საშუალების ძირითადი ელექტრული დანადგარის აღწერა. 2. ელექტროსისტემის შეერთება დჟერელთან. 3. მოამზადეთ ელექტრული დანადგარის ელექტრული წრე. 4.თარიღების დათარიღება.
მანქანების ელექტროინსტალაცია - დასაკეცი კომპლექსით დამაგრებული სროლა, სიგნალიზაცია, ელექტრო მანქანები, KVP, zapobіzhnikіv და z'єdnuvalnyh მავთულები, გაერთიანებული ერთ ელექტრულ წრედ. ელექტრული ინსტალაციის zagaln_y სქემაზე შესაძლებელია იხილოთ დანართები დამოუკიდებელი ჯგუფების დასაყენებლად. Naivazhlivіshim: ელექტრომომარაგება, სროლა, KVP, სიგნალიზაცია, განათება. კომუტაცის აპარტატურამდე უნდა შეატყობინოთ: ზაპობიჟნიკი, პერემიკაჩი, ვიმიკაჩი, სუნი შესვლის სისტემის ყველა ჯგუფში.
კავშირის განვითარების სლაიდი გაკეთდა dzherel struma-სთან. ბატარეამდე შეაერთეთ ელექტრული დანადგარები, რათა მათ იცხოვრონ დიდი სიმძლავრით და მოკლე დროში იმუშაონ (სტარტერი, სანთებელა), აგრეთვე დანაყოფები, რომლებიც საჭიროა საგანგებო სიტუაციებში (ხმოვანი სიგნალი, ნათურა, გადასატანი). ).
ისინი, ვინც ერთად ცხოვრობენ, დაკავშირებულია გენერატორთან. ზოგადად, რობოტის ბუნებიდან გამომდინარე, დანაყოფი შეიძლება ჩართოთ შეტევითი წოდებით: გენერატორს უბიძგებს, რადგან სუნი კარგია მცირე ძალისთვის და ამას ტრივიალური საათი სჭირდება; მეშვეობით ციხე zapalyuvannya, როგორც stinch dіyut pіd საათის სამუშაო dvigun; შუქის ცენტრალური გადამრთველის მეშვეობით - ყველა ანიჭებს განათებას. ადრე ითქვა, „აკუმულატორის ბატარეის შუბის ზოლის საწინააღმდეგოდ - დამწყები და აკუმულატორის ბატარეა - ხმოვანი სიგნალი.
ფარამდე 24 სტრიმი აკუმულატორის ბატარეიდან და lanciugu პოზიტიური ბატარეის ჩამკეტზე 3 - დამწყებ ჩამკეტი სტარტერზე, ამპერმეტრი 6 - აალების საკეტი 7 - შუქის ცენტრალური გადამრთველი 25 - ფარი - "მასა" -უარყოფითი ბატარეის ჩამორჩენა 3. გენერატორი ფარებამდე 24 შუშის გენერატორი 2 - ამპერმეტრი 6 і მანძილი ამის მიხედვით - გზა, როგორიცაა і აკუმულატორის ბატარეიდან "მასამდე", შემდეგ კი გენერატორის ნეგატიურ რბევამდე.
Lantsyug strumu ადრე პილოტური ნათურა 19 მძღოლის გადაუდებელი გადახურებისთვის: რელეს დადებითი გამორთვა - რეგულატორი 1 - საკეტი 7 ანთებული - ბიმეტალური საკეტი 13 - საკონტროლო ნათურა 19 - ინდიკატორის ნათურის კონტაქტი მძღოლის გადაუდებელი გადახურებისთვის - " masa" - რელეს უარყოფითი რეგულატორის გამორთვა
ანალოგიურად, ელექტრული კონტროლის ზაგალიური სქემის მიღმა, თქვენ შეგიძლიათ გაუშვათ სტრუმის გზა ძერელას ცხოვრებიდან უახლეს სიცოცხლემდე. მანქანებზე გამოიყენეთ ერთი მავთულის სისტემა, რომ სხვა ისარი იყოს "მასა" (მანქანის ლითონის ნაწილები).
ყველა გადარჩენილი პარალელურად მიიყვანეს dzherel struma-ს წინაშე, რის გამოც ზოგიერთი გადარჩენილის აღიარება იყო ჩართული, რომ დაუყოვნებლივ ენახათ ისინი.

Პატარა. 82. ელექტრომობილის მონტაჟის სქემატური დიაგრამა:
გენერატორი; 3 - დატენვის ბატარეა; 4 - დამწყები; 5 - დამწყებ რელე; 6 - ამპერმეტრი; 7-lock zapalyuvannya; 8 - დოდატკოვის რეზისტორი; 9 - ცეცხლმოკიდებული ქვაბი; 10-მანათებელი; 11 - ვარდის ხე; 12-ანთებული სანთელი;
13 - ბიმეტალური ზაპობიჟნიკი; 14 - აღორძინების ობიგრივაჩის ხელახალი ამოტუმბვის ელექტროდი; 15 - ელექტროძრავის წამყვანი; 16 - საკონტროლო ნათურა წნევის საზომი კონტაქტის გადაუდებელი დაჭერისთვის; 17 - მაჩვენებელი і მძღოლის ტემპერატურის სენსორი; 18 - მაჩვენებელი і სენსორი іvnya სროლა; 19 - მართვის ნათურა მძღოლის გადაუდებელი გადახურებისთვის; 20 - სარელეო-პერერივნიკი, რომელიც საკონტროლო ნათურა აჩვენებს შემობრუნებას; 21 - ბრუნვის მაჩვენებელი; 22 - ვმიკაჩის სიგნალი გალვანური; 23 - უკანა lіkhtarі; 24 - ფარები; 25 - განათების ცენტრალური გადამრთველი; 26 - განათების მოწყობილობები; 27 - ნათურები ძრავის განყოფილების სანთებელისთვის, სალონის პლაფონისთვის და კონტროლისთვის შორეული შუქიფარები; 28 - დანამატი z'єdnuvach; 29 - ხმის სიგნალი; A - ამპერმეტრი; ST - დამწყები; B.K, KL, R і 111 - კონტაქტები, რომლებიც, ფაქტობრივად, უნდა იყოს დაკავშირებული მრავალჯერადი დატენვის ბატარეასთან, აალების კოჭთან, საკონტროლო ნათურასთან, პერერივნიკ-როზეტთან და ბუფონის გრაგნილთან.გენერატორი
შტრიხი, რომელიც ჩანს აკუმულატორის ბატარეიდან, გადის ამმეტრზე, ვინეტის მიღმა, სტარტერის და ხმოვანი სიგნალის უკან. ნაკადი არის გენერატორიდან, რომელიც გამოიყენება აკუმულატორის ბატარეის დასატენად, პირდაპირ ამპერმეტრის მეშვეობით.
ყველა ელექტრული კონტროლისთვის გამოიყენება პოლიქლორირებული იზოლაციის უახლესი პერიოდის PGVA ბრენდის დაბალი წნევის ისრები. მექანიკური მოწყობილობებიდან მავთულის დამონტაჟებისა და ამოღების მიზნით, გამოიყენეთ ჩალიჩები. ელექტრული კავშირების გამოცვლისას აუცილებელია ელექტრული სადენების მიერთება სქემებთან.
ელექტროსადგურის სქემატური დიაგრამა ნაჩვენებია ნახ. 82.
Visnovok: ერთი საათის განმავლობაში, რობოტები დაშინებიან vivcheni ბაზის ელექტროენერგიით, გზების ჩართვის უკანა ოთახში ელექტრო lancer.
ლაბორატორიული რობოტი No14.
თემა: "მიმაგრება control-vim_ryuvalny".
I. რობოტის გეგმა.
1. Vivchiti priznachennya, ეს არის KVP რობოტიკის პრინციპი: წნევის ლიანდაგები, ვიზა ზეთის ლიანდაგი; გამაგრილებლის ტემპერატურის მაჩვენებელი, rivnya palyva-ს მაჩვენებელი; ამპერმეტრი.
2. რობოტული სენსორების Vivchit პრინციპი.
3. განახორციელეთ KVP და їх სენსორების აწყობა და დაკეცვა.
II. უსტატკუვანია.
1. КІП, КВП სენსორები.
2. სქემები, პლაკატები.
3.იარაღების ნაკრები.
III ... ფორმა არის Viconan რობოტის შესახებ.
1. KVP-ის მახასიათებლის მოკლე აღწერა. 2. აღწერეთ KVP რობოტიკის პრინციპი. 3. რობოტული სენსორების აღწერა KVP-ში.
4. შოუმენის პივნია პალივას სკამის სიმტკიცით; გამაგრილებლის ტემპერატურის დაჭერა.
5. Visnovok Viconan რობოტის შესახებ.
ძრავის რობოტული სისტემის და გაგრილების სისტემის მონიტორინგისთვის, ავზში ხანძრის არსებობისა და აკუმულატორის ბატარეის დატენვის ნიშნების კონტროლისა და მონიტორინგის დანართები (CIP). მათ წინაშე მითითებულია ზეთის წნევის ინდიკატორები, გამაგრილებლის ტემპერატურა, ავზში ხანძრის დონე, ამპერმეტრი, ზეთის დაბალი წნევის საგანგებო სიგნალი და ძრავის გადახურება. დაფაზე დამაგრებული ვკაზივნიკი მიმაგრებულია. Хні roztasvanі სენსორები ზონებში ofіvіyuvannyh ინდიკატორები.
წნევის საზომი არის olii-ის დაჭერის მაჩვენებელი. თუ საღეჭი ძირითადი სისტემის დაჭერა იზრდება, დიაფრაგმა იკლებს და ცვლის რეოსტატის კონტაქტს, რომელიც მის ოპირს აძლიერებს.
ელექტრომაგნიტური ინდიკატორი ინახება კორპუსში 1 ეკრანით, რომელიც შეიძლება დამონტაჟდეს მესამე მაგნიტურ ველში, სამი ხვეული 3, მუდმივად იშლება მაგნიტ 2-ზე ისრით, დამაგრებულია ღერძზე მყარ მასშტაბზე და მუდმივი. ჯადოსნური მასშტაბი
როდესაც შტრიხი ხვეულების გასწვრივ არის დაპროექტებული, იხსნება მაგნიტური ველი, რაც იწვევს შედეგს. ციკლურ მაგნიტურ ველთან ერთად, ისარი, მაგნიტის მუდმივი კოლაფსით, დაყენებულია სწორ მდგომარეობაში, სენსორის 5 რიოსტატის ფხვიერი კონტაქტის ან ნავთობის გადაბმულობის ქსელში. ძრავის სისტემა და ძრავა.
გრაგნილის გამაგრილებლის ტემპერატურის ინდიკატორი მსგავსია olії ვიცე ინდიკატორის. სენსორი არის თერმისტორი 9 (ნახ. 78 ბ) - დირიჟორის გამრეცხი, დამონტაჟებულია ლითონის კორპუსში 10.
დაადგინეთ გამრეცხი ცვლილებები შემოდგომაზე ტემპერატურის ცვლილებისას. რიზკა ცვლის სენსორის საყრდენს, რომ შეცვალოს სტრუმა ინდიკატორის ხვეულებში, და მაგნიტური ველი, შედეგად, აბრუნებს მუდმივ მაგნიტს მასშტაბის ისრიდან 2, რაც დამოკიდებულია გამაგრილებლის ტემპერატურაზე.
შერყევის სროლის დონის მაჩვენებელი მსგავსია ადრე აღწერილი ინდიკატორების ზეთისა და გამაგრილებლის ტემპერატურის ვიცეში (79, ა).
სენსორი არის რიოსტატი, დამონტაჟებულია ლითონის კოლოფში 5. რეოსტატის ცვლილება აუზში წყობის ქვემოდან ავზში, არის ცოტა მძიმე შეხება ძირთან, ფლოტის წვერზე, კომპლექტზე. მოცურავი 7, ნაკადის ძალა და მაგნიტი რეოსტატის ჩამკეტის ველის პოზიციაში 9. დიდი ავზით, რეოსტატის გრაგნილი ჩართულია 4-ჯერ, ხოლო სტრუმა უმნიშვნელოა. ამავდროულად, ყველა ხვეულის შედეგად მიღებული მაგნიტური ველი, გადააქციეთ ისარი მაგნიტით P ნიშანზე (ახალი ავზი).
ცვლილებების სამყაროში ბაქოში სროლის დონე არის იგივე კატის შტრიხის ძალა, რომ შეიცვალოს, ასე რომ, რიოსტატი 4-ის ოპი იცვლება, ხოლო მაგნიტური ველი, კატის ველის შედეგად, ცვლის ინდიკატორის ისარი ნულოვანი პოზიციისკენ. Resistor 8 ჩართვა lantsyug kotushok yak თერმული კომპენსატორი.
ამპერმეტრი ემსახურება ბატარეის და გენერატორის რობოტის დატენვის კონტროლს. ამპერმეტრი ბოლოს ჩართულია. როგორც კი ისარი მაღლა აიწევს "+" ნიშანზე, მაშინ ბატარეა იტენება და როგორც კი "-" ნიშანს მიაღწევს, ის იხსნება.
Visnovok: რობოტის საათისთვის bulo დაყენებულია, მაგრამ KVP კომბინაცია დაყენებულია დაფაზე. Є Ob'nannyam pokazchikіv decіlkoh კორექტირება: გამაგრილებლის ტემპერატურა, ავზში ცეცხლის დონე, ზეთის ვიცე და ამპერმეტრი. დამაგრების ასეთი კომბინაცია საშუალებას გაძლევთ შეცვალოთ ფარდის ზომა, მიამაგროთ იგი სიმღერაზე წყლის ხედზე.

Პატარა. 79. ინდიკატორი pivnya palyva:
a - prist_y; 6 - სენსორი; გ - რობოტის დიაგრამა;
] - ისარი; 2 - კატა; 3 პოსტ-მაგნიტი; 4 - pozunkovy rheostat;
5 - საქმე; 6 - ათწილადი ვაზელით; 7 - ლივა კატა;
8 - რეზისტორი; 9 - პოზუნოკი
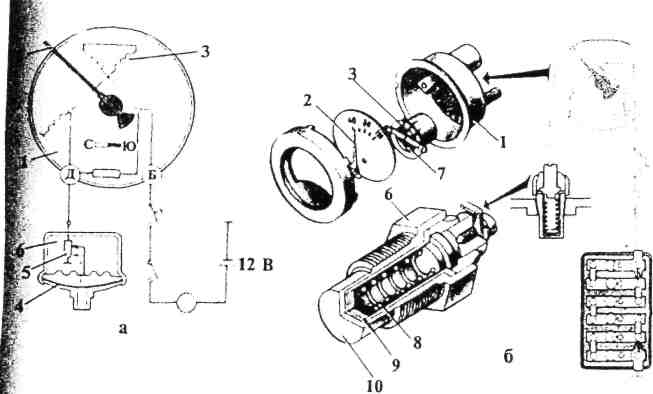
Პატარა. 78. ვიცე ოლიას საშხაპეები(ა)
ტემპერატურა ცივი(ბ):
2 - ისარი; 3 - კატა; 4 - დიაფრაგმა; 5 - რეოსტატი; 6 - სენსორი;
7-პოსტი მაგნიტი; 8 - გაზაფხული; 9 - თერმისტორი; 10 - სენსორის სხეული
ლაბორატორიული რობოტი No15.
თემა: „განათლება, მსუბუქი და ხმოვანი სიგნალიზაცია“.
I. რობოტის გეგმა.
1. ვივჩიტის თეორიული მასალა.
2. რობოტული ფარების სქემატური დიაგრამა, განათება, მოხვევის მაჩვენებელი, ხმოვანი სიგნალები.
3. განახორციელოს უნივერსიტეტების, აგრეგატების შერჩევა.
4. ვივჩიტის კონდახებზე რობოტული ნაწილების პრინციპი.
5. განახორციელეთ ნაწილების დაკეცვა.
II. უსტატკუვანია.
1. ფარები, გვერდითი შუქები (უკანა ფარები), ხმოვანი სიგნალები, მანქანიდან შემობრუნების სიგნალების ინდიკატორები.
2.ტექნიკური განათება - რა.
III. რობოტის გეგმა.
1.აღწერეთ მახასიათებელი, რობოტიკის პრინციპი, განათება, კლირენსი, ხმის სიგნალიზაცია.
2.Dzherel light აღწერა (ერთკონტაქტიანი, ორკონტაქტიანი ნათურები)
3. შექმენით ვისნოვოკი Viconan რობოტის შესახებ.
დაამატეთ გარკვეული განათება. განათების მოწყობილობების წინ არის განათება, ფარები, გვერდითი ნათურები, განათების მოწყობილობების ნათურები, კაბინები, სანომრე ნიშნები, ასევე ვიმიკაჩი.
ფარი ემსახურება გზის განათებას, სადაც ის მდებარეობს მანქანის წინ, ის იშლება. ფარის პრიზმა ნაჩვენებია ნახ. 72.
დაამატეთ სინათლის სხივი და სინათლის სხივი. შიდა ზედაპირი გაპრიალებულია, დაფარულია ლაქით და ალუმინის ან ქრომის თხელი ბურთით. ზრდა აუცილებელია სინათლის შეკვრის ლორწოვანი გარსის ცვლილებისთვის, ამისთვის ფორმა აღარ არის, შიგნიდან კი - მსუბუქი გარეგნობა. როზეტის სახით, ისე, რომ სვიტლოვას სანაპიროზე, როგორ წავიდე, ელიფსოიდური ფორმის ტყვია პირდაპირ ქვემოთ. ფარების სხივი შეიძლება დარეგულირდეს gwent 4-ით, რომელიც ცვლის ოპტიკური ელემენტის პოზიციას ან აქცევს ფარს სფერულ საკიდზე.
Dzherelo light არის ელექტრო ნათურა, რომლის შენახვა შესაძლებელია ლითონის ძირიდან, კონტაქტებიდან, შუშის ბუშტიდან და ვოლფრამის ძაფებიდან გამოწვისთვის.
ნათურები არის ერთკონტაქტიანი და ორკონტაქტიანი. აქვს თუ არა ზოგიერთ მანქანას წინასწარ დაყენებული ნისლის საწინააღმდეგოჰალოგენური ნათურებით.
მანქანების ზომების მსუბუქი მარკირების საერთო ზომები დამპალი ხილვადობისა და მიწოდების გონებაში მსუბუქი სიგნალიშემობრუნებამდე. მა ბუტის საერთო ზომების შუქი ჩანს ვიდსტანზე არანაკლებ 100 მეტრისა.
პარკირების ნათურის და უკანა ფარის მიმაგრება ნაჩვენებია ნახ.75-ზე.
მიამაგრეთ სინათლის სიგნალები. მანქანის შესაძლო მანევრის გასაუმჯობესებლად ნიშნების მობრუნების ინდიკატორი. ახალ შესასვლელთან არის სასიგნალო ნათურები, რელე და რელე. Nayb_lshogo ელექტრომაგნიტური პერერივნიკის სტრუმის გაფართოება. ჯალამბარი ინახება გრაგნილის მესამედით, გამოძახება არის 4 და რეზისტორი 7. წამყვანს აქვს 5 კონტაქტი ჩაკეტილი სასიგნალო ნათურის ფარანი, ხოლო დამატებითი ნათურა მიმაგრებულია ფარზე.
როდესაც ინდიკატორი ჩართულია, ჩართეთ სიგნალის ნათურების ფლაკონი 11 გასაჩერებლად და გადაიტანეთ სამაგრი არმატურის 5-ში, ნიქრომის ძაფზე, რეზისტორზე და არმატურის გრაგნილზე სიგნალის ნათურებზე. კონტაქტები ბევრი rosіmknenі. Oskіlki strum გადის რეზისტორსა და ძაფს, სიგნალის ნათურების ძაფები იჭიმება, რომ დაიწვას არასრული შუქით.
როდესაც შტრიხი გადადის ნიქრომის 4-ის სიმების გასწვრივ, ის რჩება გაცხელებაїї იზრდება. Tse აძლევს ძალას მაგნიტურ ველსგაიყვანეთ წამყვანი 5, სანამ კონტაქტი არ დაიხურება და დაიხურება. როცა დახურულიასაპილოტე ნათურების სტრუმის კონტაქტები გადის ძერელას სტრიმშიარმატურა 5 і core გრაგნილი, minutia resistor і string. ნათურების ძაფებითუ რეზისტორი ამოიღეს ფარანიდან, ის დაიწვება შუქით (ნათელი). ერთი საათი ს
მთავარ წამყვანთან ერთად, ბირთვის 3 მაგნიტური ველი თავისკენ მიიზიდავს დამატებით წამყვანს 2, რომელიც დამატებითი კონტაქტების საშუალებით აქცევს ინდიკატორ ნათურას 9 საკონტროლო ნათურაში 9. სტრიქონი 4 არის დაბურული, მაგარი, მოკლე და მოქნილი კონტაქტები. კონტაქტები rozmikatimatsya და zamikatimutsya, და შემდეგ, ნათურები blimatyut 70 - 100 ჯერ დღეში.
გაჩერებული ვიპუსკის მანქანებზე საგანგებო სიგნალი დამონტაჟდა. Vona განკუთვნილია გზაზე მოძრაობისთვის მანქანის გადაუდებელი გაჩერებამდე. ჩართვისას ისინი აციმციმებენ მარჯვნივ და უხვევენ თმის ვარცხნილობას და მანქანაზე დაყენებულ ინდიკატორებს, ასევე საკონტროლო სასიგნალო მოწყობილობას. სიგნალის დეტექტორები აჩვენებს შემობრუნების სიგნალს ბლოკში, სიგნალის დეტექტორები არ ანათებენ.
ხმის სიგნალი - ელექტრომაგნიტი, ვიბრაციული ტიპის, შესანახი კორპუსში, W - მავთულის მსგავსი გრაგნილით, ფოლადის მემბრანა 8, წამყვანები 7 і reryvnik 6. ელექტრომაგნიტის გრაგნილი დაკავშირებულია აკუმულატორის ბატარეიდან საჭესთან მეშვეობით. ღილაკი, რომელიც ამოღებულია ბატარეიდან. სიგნალს, რომელიც არ არის სწორი, აქვს დახურული კონტაქტები. წარმოქმნილი კონდენსატორი 2-ის გადასვლის კონტაქტების პარალელურად, რომელიც არის კავშირის წინ.
ღილაკის 11 სიგნალის დაჭერა შუბის შესაჩერებლად. ელექტრული შტრიხი, რომელიც გადის გრაგნილზე, მაგნიტიზებს ბირთვს 3, რომელიც იზიდავს წამყვანს 7. როდესაც წამყვანები გადაინაცვლებს, პერერივნიკის კონტაქტები razmikayutsya. შტრიხი წყვეტს ჩამოსვლას ბირთვის გრაგნილში. ის რჩება გაუდიდებელი და ზამბარის მემბრანიდან წამყვანმა 8 პოზიციას იკავებს. შემდეგ კონტაქტები კვლავ იხურება და იკეტება ბირთვის გრაგნილით. როდესაც ღილაკზე დაჭერით სიგნალს, კონტაქტები რბილი და გაყინულია, ხოლო მემბრანა იჭრება და ხმა ჩანს. ხმის ტონს ცვლის მარეგულირებელი gwent 5.
ღილაკის კონტაქტების ჩასაკეტად სიგნალზე დამწვარი გარეთ, ჩაკეტეთ სიგნალის რელე.
Viznovok: რობოტის დროს აღწერილია რობოტული სინათლისა და ხმის სიგნალების პრინციპი, ასევე, უსაფრთხო რობოტი მანქანაზე შეუძლებელია განათებისა და სიგნალიზაციის გამოყენების გარეშე.


Პატარა. 74. ფარები:
1 - ვიდბივაჩი; 2 - ნათურა; 3 - ფერდობზე;4 - მარეგულირებელი გვენტი; 5 - საქმე;6 - ვაზნა; 7 - ისრები; 8 - ობიდოკი

Პატარა. 75. პიდფარნიკი (ა) რომ უკანა ლიხტარი((ვ):
1 - zatiskach; 2 - ვაზნა; 3 - საქმე; 4 - ნათურა; 5 - რეზინის საფენი; 6 - როსიიუვაჩი; 7 - ობიდოკი; 8 - კარტრიჯის იზოლატორი; 9 ~ სამუხრუჭე შუქი, რომელიც შემობრუნების მაჩვენებელი; 10 - ნათურა საერთო შუქისანომრე ნიშნის რომ დაფარვა;მე 1 - biliy rosiyuvach.

Პატარა. 76. განათებული შემობრუნების ინდიკატორი:
1 ^ კონტაქტები; 2 - დოდატკოვი იაკირი; 3 - ბირთვი; 4 - სიმებიანი; - იაკირეტები; 6 - გრაგნილი; 7 - რეზისტორი; 8 - vmikach primed; 9 - ko "nt-olna ნათურა; 10 - remikach; 11 - სიგნალის ნათურა; P - pererivnik

Პატარა. 73. ხმოვანი სიგნალი:
a - prist_y; ბ - რობოტის დიაგრამა;
1 - საქმე; 2 - კონდენსატორი; 3 - ელექტრომაგნიტური ბირთვი; 4 - გრაგნილი
ელექტრომაგნიტი; 5 - მარეგულირებელი გვენტი; ბ - პერერივნიკი; 7 - იაკირი;
8 - მემბრანა; 9 - რეზონატორი; 10 - ცენტრალური გვენტი;
11 - სიგნალის ღილაკი; 12 - ძერელო სტრუმუ
Პატარა. 81. ზაპობიჟნიკი:
a - h fusible ბმულები;ბ і в - bagatorazovoy dії;გ თა დ - ერთჯერადი წვრილმანი; - ტექსტოლიტის ფირფიტა დნებადი ჩანართი; 2 - ზაპობიჟნიკების ბლოკი; არახელის კონტაქტი; 4 - საქმე: 5 - ბიმეტალური ფირფიტა კონტაქტით; 6 - ღილაკი; 7 - ბიმეტალური ფირფიტა;მე ვარ გვენტის კონტაქტი
Zapobіzhniki zastosovuyut in elektroobladnannі zajist მაშველებისთვის, dzherel struma და drotіv საწყისი struma მოკლე დაბნეულობა და აბსოლუტური. Zapobizhniki ob'ednani მე-2 ბლოკში (სურ. 81 ა), რომელიც დამონტაჟებულია დამაგრებულ დაფაზე. უჯრები 1 დანომრილია. zapishaє sv_y ელექტრო ლანსერის კანზე ჩასმა. Zapobіzhnik, scho დაიწვა, zamіyuyut, თვალწინ იცის ტირილი ბლოკი. გრაგნილის სამაგრის სავარცხელზე, სათადარიგო შუა სიგრძის საბურღი 0,26 მმ რეცესიით. 2 სტრუმასთვის 10A ta 0.36 მმ 2 სტრუმასთვის 20A.
ბაგატორაზოვაია დია სტაზის თერმოლითონის ქარხანა ძირითადად ლანციუგივის დასაჭერად განათების მოწყობილობები... ვინი ინახება კორპუსში 4 და ბიმეტალური ფირფიტა 5 ბოლოში კონტაქტით. დაზღვევის ზაპობიჟნიკი არაუმეტეს 20A. ბიმეტალური ფირფიტის კონტაქტი დაჭერილია სხეულზე დამაგრებული არაჯანსაღ კონტაქტზე 3, შუბი გაყინულია.
თუ ბიმეტალური ფირფიტის გასწვრივ გადააქვთ შტრიხი, შემდეგ შეცვლით როზაცეას სიმტკიცეს, შემდეგ ბიმეტალური ფირფიტის გაცხელების შემდეგ, აბრუნეთ (სურ. 81 ბ), თქვენ უნდა მოაწყოთ კონტაქტები ლანცეტში, სანამ არ გათავისუფლდება. როდესაც ფირფიტა გაცივდება, ის სწორდება და შემდეგ ლანციუგი იყინება. თუ პერევანტაჟენნია არ არის ჩარჩენილი ფარნებში, მაშინ კონტაქტები იკარგება და ბაგატორაზოვი განმიკayutsya, რომელიც ზედამხედველობს კეთილსენსიტიურ ტაშს.
ერთჯერადი ღილაკის ტიპის თერმობატური შესანახი მოწყობილობა (81, გ) ინახება ახალ კონტაქტებში და ბიმეტალურ ფირფიტაში დამაგრებულ კორპუსში 7. როდესაც ფირფიტა ხელახლა ჩახლართულია, viginayuchi, rozmikє lantsyug. ფირფიტის დასაბრუნებლად, თქვენ უნდა დააჭიროთ ღილაკს 6 (სურათი 81, ე).
ვისნოვოკი: რობოტები მიწაზე აიყვანეს და ასევე აღწერილია їхної дії-ის პრინციპი.
ლაბორატორიული რობოტი No17.
თემა: "Clutch კავშირისთვის".
რობოტის გეგმა:
1. ვივჩიტ რობოტიკის სქემის პრინციპი.
2. Vivchiti priznachennya, budovu რომ პრინციპი რობოტები ერთი-, dvodnogo zchelennya.
3. განახორციელეთ მაფების შერჩევის ნაწილი.
4.Vivchit დეტალები, їkh დიზაინი, პრინციპი robotic mufti zhelennya, scho შესვლის საწყობში.
5. განახორციელეთ დასაკეცი.
შექმენით პრაქტიკული რობოტები.
1. Clutch მიერთებულია მანქანიდან. 2.გასაღებების, ხელსაწყოების ნაკრები.
3. ტექნიკური ლიტერატურა.
ფორმა არის Viconan რობოტის შესახებ.
1. ნაკრესლიტის სქემა ერთ, ორდისკიანი ზეპლენნია. 2. ერთი დისკის დისკის რობოტების მოკლე აღწერა. 3. დისკის დისკის რობოტიკის მოკლე აღწერა. 4.აღწერეთ მანქანის გათბობის მნიშვნელოვანი მექანიზმი. 5. მიუთითეთ თარიღი Viconan რობოტის შესახებ.
ინკორპორაცია.
კავშირი გამოიყენება მოკლესაათიანი გადაცემისთვის და გადაცემისთვის გადაცემათა კოლოფის შერევისა და გლუვი კავშირის დროს, როდესაც მანქანა მოძრაობს მანქანიდან.
მანქანებზე vicoristovuyut ხახუნის სითბო. ამ ტიპის რობოტი საყვედურობს მანკიერ ძალებს გახეხვით. Yak terty ზედაპირები ემსახურება როგორც დისკებს, მზადაა მასალისთვის გახეხვის მაღალი ეფექტურობით. გადაცემული ბრუნვის შედეგად, საჭიროა განისაზღვროს გასაფრქვევი ელემენტების რაოდენობა, რომელიც შეიძლება იყოს ერთ-, ორდისკიანი.
ერთ დისკიანი საცავი. მამოძრავებელი დისკი 1 დამონტაჟებულია მფრინავით, ხოლო 3 დაშვება ხორციელდება გადაცემათა კოლოფის 8 ლილვზე. Mokhovik vikonuє ერთსაათიანი დისკის ფუნქცია.
წნევის დისკსა და შეერთების გარსაცმს შორის ზამბარების რაოდენობა 2-ით, შემდეგ გამკაცრეთ დისკი წნევის დისკსა და საფრენ ბორბალს შორის. გახეხვის შედეგად, როგორ არიან მათ შორის გამარჯვებულები, მომენტი, რომელიც შეფუთულია, დვიგუნიდან გადაცემათა კოლოფის გადამცემ ლილვზე გადადის.
დამოწმება ეფუძნება გაზრდის მექანიზმს. დაღმავალი საკისარი 6 გადაადგილდება დამხმარე ჩანგლის უკან და გამოდის პედლებიდან 7. შიდა ბოლოზე შეტევის საყრდენი მნიშვნელოვანია 5, და დისკის გარე წევა ამოძრავებს და ძალა გამოიხატება. თუ პედალი გაათავისუფლეს, წნევის დისკი ზამბარამდე 2 აჭერს დისკს საფრენ ბორბალზე - გადაბმული ჩართულია. ჩართვის სიგლუვე იზრუნებს დისკების ლიკვიდაციაზე იმ მომენტამდე, სანამ დისკს კვლავ არ დააჭერთ. ამას ასევე უწოდებენ მშრალ, მუდმივად დახურულს. ერთდისკიანი zeplennya-ის prist_y ნაჩვენებია პატარათი. მე დავიჭერ სოლის ნაწილს, დავკეცავ გარსაცმს 18 და წნევის დისკს 22, შევაერთებ მას გარსაცმის სამი მარჯვენა ხელის ჭრილში. დვიგუნის უკანა მომენტი საფრენი ბორბალიდან გადადის გარსაცმის დამაგრების ჭანჭიკებით, ხოლო ახლის მეშვეობით - წნევის დისკზე.
ხელმძღვანელობს საფქვავის ნაწილი, რომელიც ემსახურება როგორც გზამკვლევი დისკი 9 ორივე მხარეს დამაგრებული რგოლის ხახუნის ბალიშებით 24 დაჭერით აზბესტის დამსხვრევა დისკებით გახეხვის გაზრდის მიზნით, როდესაც გასაღები ჩართულია. ავარიის თავიდან ასაცილებლად და ბორბლების თავების გადაცემის თავიდან ასაცილებლად დისკიდან გადაცემის ლილვზე, დაკავშირებულ დისკზე, ბორბლების თავების დემპერი - ამორტიზატორი Win არის დედა 12, წამყვანი ბორბლის ფანჯარასთან.


Პატარა. 84. ინკორპორაცია:
a - back-end სქემა; b - prist_y;
1 - მავთულის დისკი; 2 - გაზაფხული; 3 და 9 - წამყვანი დისკები; 4 - მფრინავი;
5 და 14 - მნიშვნელოვანი; 6 და 20 - უფასო საკისრები. 7 - პედლებიანი;
8 - ტრანსმისიის გამტარ ლილვი; 10 - გაზაფხულის ფირფიტა; 11 - დემპერის გაზაფხული; 12 - ამოძრავებული დისკის დედა; 13 - დემპერის ფირფიტა; 15 - vidzhimny vazhel ხედი; 16 - მარეგულირებელი კაკალი; 17 და 21 - გაზაფხულის დაძაბულობა;არის - გარსაცმები; 19 - clutch ტარების კორპუსი. 22 - წნევის დისკი; 23 - plug vimikannya zchelennya; 24 - ხახუნის ბალიშები

სპირალური ზამბარები იდება დისკიდან დედისთვის შესაფუთი გადასატანად. ზამბარის შეუფერხებლად ჩართვისთვის, ლედ დისკის უკანა ნაწილს შორის პედალზე დადგმისას, ხახუნის საფენი მოქნილია ხახუნის საფენით.
ერთ დისკიანი ხახუნები ფართოდ არის გაფართოებული მანქანებისთვის... ამოძრავებული დისკი 1 ჩაჭედილია წნევის დისკს 11 და მფრინავს შორის ზამბარებით 2 3.
როდესაც ელექტროენერგია ჩართულია, წნევის დისკი შემოდის 7-ის დამატებითი მნიშვნელობის უკან, გამოშვების საკისრიდან და ჩანგლის 6-ის უკან.
დისკის დისკს აქვს ორი დისკი და ორი მავთული; ინდუსტრიული წამყვანი 13 და 11 თავდასხმა, შექმნილი ხელით. ერთზე მეტ ზედაპირზე გადატანილი დისკების რაოდენობა კარგავს დიდ მომენტებს ერთი საათის განმავლობაში. წამყვანი დისკების კერა 1 მოთავსებულია დედალი ლილვზე 5, რომელიც არის გადაცემათა კოლოფის ლილვი. ლილვის წინა ბოლო სპირალურად მიემართება ლილვაკის საკისრზე, განლაგებულია როზეტის სვეტებთან. ლილვი.
შედეგად, დისკები იკუმშება მფრინავის ბოლო ზედაპირებსა და მავთულის დისკებს შორის ცილინდრული ზამბარებით 3, რომლებიც ერთნაირად იწვება გარსაცმში.
სამრეწველო დისკი 13 არის მნიშვნელოვანი მექანიზმი 12, რომელიც ავტომატურად მოათავსებს დისკს შუა პოზიციაში, როდესაც ის დაკავშირებულია.
Vіdzhimnі მნიშვნელოვანი 7 დამაგრებულია გარსაცმით ჩანგლებით და თხილით. კლავიშების სახელები დაკიდებული უკავშირდება წნევის დისკს 11, ხოლო შიდა - რგოლს 15. პედალი უკავშირდება საკისრებს ჩანგლის მეშვეობით 6, რაც მნიშვნელოვანია ბიძგისთვის.
პედალზე დაჭერისას, საკისარი 4 ატარებს რგოლს შიდა ბორბლების შიდა ბორბლებით, ხოლო მნიშვნელოვანი 7-ის ბოლო წუთები აწევს წნევის დისკს 11 უკან. არ გადაიცემა.
მნიშვნელოვანი მექანიზმი, მათ შორის მნიშვნელოვანი 2, დამონტაჟებული მე-3 ღერძზე, ზამბარებით დაგრეხილი, რომელიც მოთავსებულია შუალედური დისკის პორტებში 1. მნიშვნელოვანი ვარდნა ბორბალს 4 და წნევის დისკს შორის 6. 86, ბ. 3 ღერძებზე ზამბარებით ამოიღეთ დამატებითი გრეხილი.
როდესაც წნევის დისკი 6 შედის კონტაქტში საფრენ ბორბალთან და 2-ის მნიშვნელობასთან, ის ტრიალებს ზამბარების გადახვევისა და აწევის პოზიციის გამო, ნაჩვენებია ნახ. 86, ხელოვნება. მნიშვნელოვანია სამუშაოს შესრულება
საფრენი ბორბლის შუალედური დისკი 1, რომელიც დგას წნევის დისკის სიახლოვეს.
Viznovok: ვიკონანოი რობოტების შედეგად შემოიღეს pristіy, რომელმაც აღიარა ძირითადი ნაწილების პრინციპი და მუფთის ინსტიტუტები.
- [სტრიქონი 1] -
რუსეთის ფედერაციის დაარსებისა და მეცნიერების სამინისტრო
დადგენილია ფედერალური სახელმწიფო ბიუჯეტის დაფარვა
მთელი პროფესიული განათლება
"ულიანივსკის დერჟავნის ტექნიკური უნივერსიტეტი"
ლაბორატორიული და პრაქტიკული რობოტები
VANTAGE მანქანის დანართი
ლაბორატორიული რობოტების მეთოდური ინსტრუქციები დისციპლინაში "ავტომობილები", "ავტომობილების და ტრაქტორების მშენებლობა"
Ukladach V.A.MIGACHOV Ulyanovsk UlSTU 2011 UDC 629.3.083 (076) BBK 39.33-08ya7 L 12 Reviewer Cand. ტექ. მეცნიერი, ასოცირებული პროფესორი ობშივალკინი მ.იუ.
მეთოდური წიგნების განყოფილება, სამეცნიერო და მეთოდური UlDTU-ს გულისთვის. - ულიანოვსკი: UlSTU, 2011 .-- 64 გვ.
იკეცება დისციპლინების "ავტომობილების" და "ავტომობილებისა და ტრაქტორების მშენებლობა" სტანდარტული პროგრამების მიხედვით.
დანიშვნები ყველა ფორმის სპეციალობის სტუდენტების მიერ ლაბორატორიული სამუშაოს მომზადებისა და პრეზენტაციისთვის 190601.65 და "საავტომობილო და საავტომობილო მთავრობა", 190201.65 "საავტომობილო სახელმწიფო ტრაქტორების მშენებლობა", ასევე ტექნოლოგების უშუალო მომზადებისთვის 190600.62 "სატრანსპორტო და ტექნოლოგიური კომპლექსები" "საავტომობილო ტრაქტორები ბუდუვანია").
რობოტ ვიკონანოს "საავტომობილო" განყოფილებაში.
UDC 629.3.083 (076) BBK 39.33-08 © Migachov V.A., 2011 წ.
© დიზაინი. UlDTU, 2011 წ.
შეუერთდი ……………………………………………………………………………ინსტრუქციები დაკრძალვის პრაქტიკისთვის
როდესაც ტარდება ლაბორატორიული და პრაქტიკული სწავლა
1. ძრავა კამაზ-740 …………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………………………………… …………………………………………………… .. აკონტროლეთ საკვებიდასაწყებად 1 ………………………………………………… ინსტრუმენტული და ტექნოლოგიური ბარათი No1 …………………………………………………………………… ……………………………………………………………………………………………………………………… .. აკონტროლეთ საკვები მიწოდებამდე 2………………………………………… …… ინსტრუმენტული და ტექნოლოგიური ბარათი No. 2 …………………………………………………………………………………………. 3 …………………………. ……………… მენეჯმენტი 3. თემა „დიზელის ძრავის სისტემა“ ................................... ...................................................... სასწავლო და ტექნოლოგიური ბარათი No4 …………………………………… … 2. გადაცემა …………………………………………………………………………. უფროსი 4. საგანი „KAMAZ-5320-ის გადაცემა“ ………………………… აკონტროლეთ საკვების დაწყებამდე 4 ……………………………………………… ინსტრუმენტული და ტექნოლოგიური ბარათი No 5 ………………………………… ინსტრუმენტული და ტექნოლოგიური ბარათი No6 …………………………………………… 3. სასეირნო ნაწილი ………………………… ………………………………… მენეჯმენტი 5. თემა „კამაზ-5320 მანქანის გაშვებული ნაწილი“ ………………… .. საკვების კონტროლი მიწოდებამდე 5 ……………………………… …………………… ინსტრუქცია - ტექნოლოგიური ბარათი No7 ………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………………………………… ………………………………. განყოფილების უფროსი 6. თემა „კამაზ-5320 ავტომობილის მართვის კონტროლი“ ………. ინსტრუმენტული და ტექნოლოგიური ბარათი No. .. საკვების ტესტირება მიწოდებამდე 7 ………………………………………… ბიბლიოგრაფიული სია ……………………………………………შეუერთდი
ლაბორატორიულ-პრაქტიკული მეთოდის გამოყენებით აიღეთ მანქანა მანქანის კონსტრუქციიდან - გააერთიანეთ სათაო ოფისებიდან მიღებული თეორიული ცოდნა და დამოუკიდებელი რობოტების და სტუდენტების პროცესიდან. საწყისი ლიტერატურა... როდესაც სტუდენტები სტუმრობენ ლაბორატორიულ-პრაქტიკულ შენობებს, მათ ესაჭიროებათ დამოუკიდებელი ოპერაციები დანადგარების აწყობა-დაკეცვისგან, ანექსიის კონსტრუქციის წინა პლანზე, რობოტის თავისებურებებისა და პრობლემების წარმოების უსაფრთხო მეთოდებისთვის.Vivchayuchi pristіy, დანაყოფების დემონტაჟი და მონტაჟი, ნაწილების ცოდნა და მონტაჟი, სტუდენტები otkatkovі პრაქტიკული რჩევები ოპერაციების განსახორციელებლად, კრეფა-დაკეცვა, რეგულირება, დაიწყეთ ხელსაწყოების რაციონალური ტესტირება, დანართები. მოადგილე რობოტებისა და ვიკონავცოვის წმენდის სამყაროში პრაქტიკულ დაწესებულებებს შეუძლიათ კომფორტულად ყოფნა, ღილაკების დახურვა ბლოკების პროფესიონალური აწყობისა და დასაკეცი, თერმული ხარვეზების რეგულირებისთვის და შიგნით. რობოტები usuneniya უსამართლობებისგან, ბატონო ტექნიკური მომსახურება vikonuvati ოპერაციები მექანიზმების რეგულირებით, რაც უზრუნველყოფს მანქანის საიმედოობას.
პრაქტიკული წარმოების განვითარება ერთეულების აწყობისა და დაკეცვისგან, სანამ გავაგრძელებთ თეორიული ცოდნის კონსოლიდაციის ეტაპს იმის შესახებ, თუ რომელი ერთეულები და მექანიზმები ინახება. Tsyy meti є ხელმძღვანელობით іlustrativniy მასალა.
ასე რომ, როგორც რობოტები ცოდნისთვის, დანაყოფების აწყობა-დაკეცვა ხორციელდება აწყობის მანქანებიდან, აწყობის მექანიზმებიდან და არა სხვა მანქანებიდან, დემონტაჟის ოპერაციების ნაწილი არ ჩანს ტექსტში, პროტესტი, ხელსაწყოების შეკრების აღწერაში. ტექნიკა აღჭურვილია ...
კრეფა-დაკეცვის მექანიზმია საჭირო იმისათვის, რომ გამოსწორდეს, რადგან მას დეტალების სუნი ასდიოდა, რადგან სუნი რობოტის შეცვლას ერთი საათი დასჭირდება.
დოიაკი ზავდანნიახში იგი გადავიდა მექანიზმის განვითარების ნაწილის ჩამორთმევაზე. მშვიდი პრობლემაა, თუ თქვენ ხედავთ მექანიკის დეტალებს და ხედავთ მათ ხელახლა არჩევის გარეშე, ან თუ მსგავსი მექანიზმია, სტუდენტებმა უკვე შეარჩიეს იგივე მექანიზმი მომდევნო საათის განმავლობაში.
დეფექტების დეტალების შემოწმებისას (დეფექტების გამოვლენის ვიზუალური დიაგნოსტიკა) აუცილებელია შეფასდეს ზედაპირი, ხახუნი, გადაცემათა კოლოფის კბილების ცვეთა, სადესანტო მექანიზმები, საკისრები, დეტალები, ამწე ლილვი. აკრეფისას საჭიროა პატივი სცეს მარეგულირებელი ბალიშების რაოდენობას, ხოლო მარეგულირებელი ბალიშების გზიდან ამოღებას ერთი საათი.
მექანიზმის არჩევისას აუცილებელია აყვანა (ქარხანაში არის მოკლე ფორმულირება: „აიღე ბოლო წუთში, აკრეფის ხმაზე“).
ნაწილების დალაგების ეტაპს, მექანიკას, რათა ჩამოერთვას რობოტის მომზადება, მე მოვაწყობ მას ძალიან მნიშვნელოვანს, მაგრამ ოპერაციის ყველაზე მნიშვნელოვან ეტაპს, ექსპლუატაციის ტრივიალურობის დადების გადაწყვეტილების შედეგად.
როდესაც მექანიზმი იკეცება, აუცილებელია დავრწმუნდეთ, რომ ერთი დეტალი პასუხისმგებელია თაგვებზე და რობოტის დამაგრების მოწყობილობაში საჭირო უფსკრულისთვის.
სამონტაჟო და მარეგულირებელი სამუშაოების ჩასატარებლად სტუდენტები დამნაშავე არიან ინსტრუმენტების ნაკრების დედას, ასევე დამატებით ხელსაწყოებსა და დანართებს, რომლებიც აუცილებელია ადმინისტრაციისთვის.
ვიზიტორი რობოტისთვის საჭირო ხელსაწყოების ნაკრები:
1) ქანჩები, ორმხრივი თხილი 810; 1012; 1213; 1314; 1417 წ. 1719 წ.
1922 წელი; 2224; 2427; 2730; 3236 მმ;
2) ბოლო გასაღებები 10; 12; 13; თოთხმეტი; 17; 19; 22 და 24 მმ ან ბოლო ქანჩები იმავე ზომის ალტერნატიული თავებით კომერციულად ხელმისაწვდომი პოდჟუვაჩით;
3) vikrutki, pasatizhі, მრგვალი ცხვირის ქლიბი, ჩაქუჩი, ჩიზლი, წვერი.
სტუდენტები დამნაშავენი არიან იმაში, რომ შეუძლიათ ამის გაკეთება დამოუკიდებლად წინასწარი გაფრთხილების გარეშე, რათა აირჩიონ ინსტრუმენტი კონკრეტული ოპერაციების განსახორციელებლად საათიდან დაწყებამდე.
ტექნიკური სამსახურის მუშაობა მოწესრიგებულად დასრულდება.
პრაქტიკული მუშაობის პროცესში მნიშვნელოვანია რობოტების მონახულება. მე ვაპირებ რობოტის ნახვას კუბის წინ, რათა ვისწავლო ინსტრუქციები, რათა დავიცვათ პირველი საათი ლაბორატორიაში - პრაქტიკული საგნების "ავტომობილები" და "ავტომობილებისა და ტრაქტორების კონსტრუქციები"
ინსტრუქციები დაკრძალვის პრაქტიკისთვის
როდესაც ტარდება ლაბორატორიული და პრაქტიკული სწავლა
1. Odyag uchnya არის დამნაშავე, რომ გადაიხადეს yo ზრდის, გასახდელი, sleeves zastebnut. მაє ბუტის თმას თავსაბურავით ართმევენ.2. მეცნიერის ხელები არ არის დამნაშავე იმაში, რომ ზეთი აქვს და აუცილებლად გამოიყენებს ხელსაწყოს. გაიწმინდეთ ხელები ბენზინისა და დიზელის სანთურებით.
3. მტკიცედ თაგვები იზრდებიან სისუფთავესა და წესრიგში;
4. თუ იცით რომელიმე აწყობილი ერთეული, შეიძლება ამხანაგში იყოს ზეთი, მიაწოდეთ აბაზანა გაბრაზებული იოგოსთვის. თუ ოლია პოდლოგში მოხვდება, წვეულებამ უნდა აიღოს ტიროი, ცოტა ხნით უკან დაბრუნდეს და ტალახის მოწესრიგების შემდეგ, წვრილმანი განჩირკით გაშრეს. განჩირა გაიწმინდება ზალიზნის ყუთში შიმშილისგან.
5. სატრანსპორტო სატრანსპორტო საშუალებების ბორბლების დაყენებისას, მონტაჟისა და განბლოკვისას აუცილებელია მოცურების საწინააღმდეგო ფეხსაცმლის დაყენება.
6. ადექით ფეხით სატრანსპორტო რგოლებზე და მექანიზმების არასახელმწიფო ნაწილებზე შემოღობვისკენ.
7. მრგვალი ნაწილები (ლილვაკები, დგუშები, ცილინდრები, სამაჯურები და ა.შ.) დაცულია და კიდე მაგიდაზე დადე.
8. Vikoristovuvaniyu რობოტებისთვის ინსტრუმენტი არის დამნაშავე, მაგრამ საცნობარო სადგურზე და ჰპირდება ვიმოგების სიმღერას:
ჩაქუჩი დამნაშავეა trocha opucleus-ის დედას, გლუვი, ჭრილებისა და თხრილების გარეშე; ჩაქუჩის სახელური, დამზადებული მყარი ხისგან, არაზეთოვანი, გლუვი, კვანძების გარეშე, სოლი;
წიწილა დედისგან უდანაშაულოა დარტყმის ზედაპირზე და ბზარების მოწყენილობა, ლითონის სამუშაო-გამკვრივება, ჩიპები, ვიბრაციები;
ვიკრუტკა არ არის დამნაშავე მტრულად განწყობილი რობოტი ბავშვის დედაში, ხოლო ვიკრუტკას გაპარსვა დამნაშავეა, რომ სწორია, არ მოხრილი;
ვიმირუვალნის ინსტრუმენტი არის დამნაშავე, მაგრამ სუფთა, მშრალი და გასუფთავებული სამუშაო ინსტრუმენტიდან;
ოპერაციისთვის თხილის გასაღებები ზუსტად უნდა აირჩიოთ ზომის მიხედვით;
ფარიკაობა ქანჩით, რომელზედაც ღრუბელი არ არის პარალელურად და ფირფიტის დასაწყისში;
დაუშვებელია podovzhennya vazhelya for rakhunok vikorystannya shmatka მილის და chi іnshy გასაღები.
8. ჯეკი უნდა იყოს დამონტაჟებული დანიშნულ ადგილებში. თუ მნიშვნელობა არ არის, მაშინ ადგილის ვიბრაციას ახდენთ, ისე, რომ ერთეულის შეძენილი საკუთრების პოზიცია მიუწვდომელი იქნება. ღეროს თავის ზედაპირი არ არის დამნაშავე ლიკვიდაციის ტოლერანტობაში. ჯეკი აღჭურვილია ფართო მიცნას დაფით.
დადგით ჯეკი ვერტიკალურად. დაზღვევის ერთი ნაკრების საფუძველზე დგინდება საქონლის მიწოდება.
დვიგუნის გაზის წარმოქმნის მექანიზმი"
Meta zavdannya - vivchity dvigun და nabuti navichok schodo їkh rozbyrannya და დასაკეცი მექანიზმების შენახვის ერთეულების პრაქტიკულ დამონტაჟებაზე. სწორად დაჭერით, დააინსტალირეთ დგუშის რგოლები დგუშზე (ნახ. 1.1) და დგუში შემაერთებელი ღეროთი ერთდროულად ცილინდრში, აიღეთ შემაერთებელი ღეროები და ბირთვის ჩანართები, გაზის ძრავის მექანიზმი, დააინსტალირეთ როტორის მექანიზმები უკან. sleeves, სწორად მორგება
საილუსტრაციო მასალა - ნახ. 1.1-1.3, მთავარ პლაკატებზე.
მსგავსი რობოტები:
„5 ვ.მ. პეტროვი, ი. F. DYAKIV ELECTROOBLADNANNYA, ELECTRONIC SYSTEMS І BORTOVA საავტომობილო დიაგნოსტიკა Navchalniy მესენჯერი დამტკიცებულია რუსეთის ფედერაციის უმაღლესი საგანმანათლებლო დაწესებულებების UMO-ს მიერ რეგიონში განათლებისთვის სატრანსპორტო მანქანებირომ სატრანსპორტო და ტექნოლოგიური კომპლექსები, როგორც ძირითადი სახელმძღვანელო სტუდენტებისთვის, რომლებიც ეძებენ სპეციალურ უნარებს 190201 (150100) - საავტომობილო ტრაქტორები. 6 Ulyanovsk 2005 VSTUP ელექტრო კონტროლი, ელექტრონიკა და სატრანსპორტო საშუალებების ბორტ დიაგნოსტიკა საწყობიყოველდღიური სახმელეთო ტრანსპორტი…”
«ROSROBKA საკონტროლო პროგრამები Z CNC ვერსიისთვის CAD T-FLEX CNC-ში ჩერნივცია კომპიუტერული განლაგება მ.ა. ფილატოვა ხელმოწერილია მომდევნო 10.03.06 ფორმატი 60 84/16. ქაღალდის ოფსეტური. Druk ოფსეტური Garnitura Times New Roman. დრო: 3.02 დ. p_ch. ლ.; 3.0 uch.-ხედი. ლ. ტირაჟი 100 ეგზემპლარი. 116 მილიონი ..."
«MINIBRANAUKI RUSSIA ფედერალური სახელმწიფო ბიუჯეტის განათლება Vyshta Professional Education Ukhta State Technical University (UDTU) N. R. Shol, A. V. Salnikov, L. F. Tyoten'kina DIPLOMNE І COURSE. პირველადი მეთოდოლოგიური პროვაიდერის ფორმულირება, პრეზენტაცია დაშვებულია პირველადი მეთოდური პროცედურების ჩასატარებლად, როგორც მაგისტრი, ზოგადი პროფესიული პირველადი იპოთეკის სტუდენტებისთვის, რადგან მათ აქვთ სპეციალური მანქანა ...
"BUDIVNITSTVA MDSU DEPARTMENT OF წყალმომარაგების მეთოდოლოგიური VKAZIVKI კურსის პროექტი დისციპლინის შესახებ" SANITARNO-TECHNICHNE OBLADNANNYA MUCHNIK VUCHANNYA 2011 2009-9201. პროფესორი, დოქტორი V.A. ნეჩიტაევა ასოცირებული პროფესორი ხურგინი რ. უფროსი ვიკლადაჩ პრესნოვი ვ.ა. მაგისტრანტი...“
"ფედერალური agentsіya of osvіti Ulyanіvsky მძვინვარებს tehnіchny unіversitet MARKETINGOVІ DOSLІDZHENNYA არ ZV'YAZKAH W SUSPІLNOSTYU Metodichnі ფასი არ არის მითითებული, რომ rekomendatsії studentіv spetsіalnostі Zv'yazki of gromadskіstyu, іnshih napryamіv რომ spetsіalnostey sotsіalnoekonomіchnogo რომ gumanіtarnogo profіlіv Ukladach O0V3 V4 B6 B6 V2 R3 60.5 ya7 M26 რეცენზენტი დოქტორი სოც მეცნიერებები Є. პ.ზაიმალინი დახელოვნებულია სამეცნიერო მეთოდური წიგნების განყოფილებით ... "
„რუსეთის ფედერაციის განათლების სამინისტროს სანქტ-პეტერბურგის დაბალი ტემპერატურისა და კვების ტექნოლოგიების სახელმწიფო უნივერსიტეტის ა.ვ. ბარანენკო, ვ.ს. კალიუნოვი, ბ.მ. მალოვანიი, ა.ია. Eglit მაცივრის ტექნოლოგიური გაგრილების პრაქტიკა NAVCHALNYI TASKI რეკომენდირებულია რუსეთის ფედერაციის განათლების სამინისტროს საწყისი მეთოდური ინფორმაციისთვის
«EKONOMIKA OF VIDAVNITSTVO TDTU BBK U9 (2) 301y73-5 E40 დამტკიცებულია უნივერსიტეტის რეცენზენტის სარედაქციო კოლეგიის მიერ ეკონომიკურ მეცნიერებათა კანდიდატი, ასოცირებული პროფესორი ო.ვ. ვორონკოვა საწყობში: ბ.І. გერასიმოვი, ვ.ვ. დრობიშევა E40 მრეწველობის ეკონომიკა: პროგრამა, მეთოდური ინსტრუქციები / გზა. : B.I. გერასიმოვი, ვ.ვ. დრობიშევა. - ტამბოვი: ტამბის ხედი. ჩატარების ტექ. un-tu, 2007 .-- 20 გვ. - 100 დაახლოებით. მოცემულია პროგრამა, მოცემულია მეთოდური ინსტრუქციები სასწავლო გეგმას ვიკონანნია რობოტები, ის ზავდანი და ვიმოგი...“
„შესაძლებლობათა თეორია და მათემატიკური სტატისტიკა VIDAVNITSTVO TDTU რუსეთის ფედერაციის განათლებისა და მეცნიერების სამინისტრო GOU VPO Tambov State Technical University Theory of Visitities and Mathematical Statistics to სამართავი რობოტებისპეციალობების სტუდენტებისთვის 080105, 080109, 080500 Tambov TDTU Vidavnitstvo 2008 UDC 51:33 ББК В11я73 С606 რეკომენდებულია TDTU-ს რეფერენტი ეკონომიკის დოქტორი, პროფ.
”რუსეთის ფედერაციის მეცნიერების სამინისტროს ფედერალური სახელმწიფო საბიუჯეტო საგანმანათლებლო ფონდი პროფესიული განათლების ტულას სახელმწიფო უნივერსიტეტის მაღალი მიმდინარე სისტემების ინსტიტუტის IM. ვ.პ. გრიაზევას გამოყენებითი ბიოტექნიკური სისტემების დეპარტამენტი და მეთოდოლოგიური ინსტრუქციები ვიკონანიას კურსის რობოტებისთვის VIMIRYUVALNIKH აპლიკაციების დიზაინის დისციპლინაში Forward training: 200100 Applied Qualifications. ტულა 2012 ... "
„ფედერალური სააგენტო OSVITI RF SHIDNO-SIBIRSKIY DERZHAVNIY TECHNOLOGICHNY UNIVERSITY S.V. პავლოვა METHODOLOGICAL RESEARCHES მინიჭების სადიპლომო პროექტი სპეციალობის სტუდენტებისთვის 280900 Design of sewing virobes Ulan-Ude, 2005 LBC 37.24-2 UDC 687.016.5 P. 121 რეცენზენტები: დ.А. ნიკოლაევა, ხელმძღვანელი. EIF VSGAKI დეპარტამენტი, დოქტორი, ასოცირებული პროფესორი; ლ.ვ. სუხანოვი, მე-6 პროფესიული ლიცეუმის ვიკლადაჩი მ.ულან-უდე. პავლოვა ს.ვ. A.121. მეთოდური ინსტრუქციები სადიპლომო პროექტის მინიჭებამდე...“
მოსკოვის რეგიონების დაარსების სამინისტრო DERZHAVNA AUTONOMOUS OVITALNA ESTALISHMENT VISCHOЇ PROFESSIONO REGION
"მოსკოვის სახელმწიფო რეგიონალური სოციალურ-ჰუმანიტარული ინსტიტუტი"
ლაბორატორიული პრაქტიკა პრაქტიკული პრაქტიკით
პირველი ნაბიჯის მეთოდური წიგნი
სპეციალობებისთვის: 050502 "Profesіyne navchannya" (ტრანსპორტი) სრულ განაკვეთზე navchannya ფორმა
UDC 629.113 (076.5) BBK 39.33 L-33
vidavnichyu სიხარული MGOSGI
მიმომხილველი:
რიაზანცევი ო.ი., მანქანათმცოდნეობის განყოფილების პროფესორი;
ლაბორატორიული სემინარი პრაქტიკული მეცადინეობიდან. საწყისი მეთოდური სახელმძღვანელო. ლაბორატორიის ასისტენტი: მანქანათმშენებლობის დეპარტამენტის ასისტენტი ანტიპოვ ა.ო. - კოლომნა: MGOSGI, 2012 წ.
ნიშნების ლაბორატორიული სახელოსნო საავტომობილო სპეციალობების სტუდენტებისთვის. Meta vidannya - ორგანიზება და საკონსულტაციო დახმარება სტუდენტებისთვის ლაბორატორიული პრაქტიკული მუშაობის შემთხვევაში საგნის "პრაქტიკული მეცნიერების", "ავტომობილის" პრაქტიკული ოსტატობისას არის მეთოდური და დიდაქტიკური დამატებითი დახმარება გამარჯვებებისთვის პრაქტიკული სამუშაოს ორგანიზებასა და განხორციელებაში.
კანის ლაბორატორიულ-პრაქტიკული რობოტი ინახება თეორიულ ბლოკში მეცნიერების საბაზისო ცოდნის განახლებისთვის, რომელიც აღწერს რობოტის ბგერაზე გამოყენების თანმიმდევრობას. საცალო ვაჭრობის მაღაზიების აქცენტი კეთდება წერის მაქსიმალურ კონტროლზე, რათა სტუდენტებმა გაეცნონ რობოტებს.
სემინარის ორგანიზებისთვის ერთი საათია. ტრაქტორები და მანქანები. - M: Agropromizdat, 1987, Borovskikh Yu.I., Buraghv Yu.V., Morozov K.A. Vlashtuvannya მანქანა. - M: ვიშჩას სკოლა, 1989 წ.
© Antipov A.O., 2012 წ.
© DAOU VPO "მოსკოვის სახელმწიფო რეგიონალური სოციალური და ჰუმანიტარული ინსტიტუტი", 2012 წ.
შესვლა ..................................................... ................................................... ................................................ | |
უსაფრთხოების ტექნოლოგიის ზოგადი წესები ..................................................... ................................................... | |
ლაბორატორიულ-პრაქტიკული რობოტი No1 .......................................... ................................................... | |
ლაბორატორიულ-პრაქტიკული რობოტი No2 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No3 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No4 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No5 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No6 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No7 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No8 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No9 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No10 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No11 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No12 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No13 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No14 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No15 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No16 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No17 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No18 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No19 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No20 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No21 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No22 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No23 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No24 .......................................... ................................................. | |
ლაბორატორიულ-პრაქტიკული რობოტი No25 .......................................... ...................................... | |
ლაბორატორიულ-პრაქტიკული რობოტი No26 .......................................... ...................................... | |
ლაბორატორიულ-პრაქტიკული რობოტი No27 .......................................... ...................................... | |
ლაბორატორიულ-პრაქტიკული რობოტი No28 .......................................... ...................................... | |
ლაბორატორიულ-პრაქტიკული რობოტი No29 .......................................... ...................................... |
შესვლა
ლაბორატორიულ-პრაქტიკული დასაქმება - გარდამავალი ეტაპი თეორიიდან პრაქტიკაში. საგანი „პრაქტიკული ცოდნა“ გამოიყენება გამოყენებით საგნებზე არა მხოლოდ თეორიული ცოდნის დაუფლებით, არამედ პრაქტიკული ცოდნის ჩამოყალიბებით, რომელიც ნაკლები იქნება. ავტომექანიკას თეორიულად მოკლებულია თავდაპირველი მანქანების კეთილშობილება. მათი პროფესიული შესრულების სპეციფიკა ისეთია, რაც საფუძვლად უდევს მანქანის ტექნიკურ მომსახურებას და შეკეთებას ბიზნეს ოპერაციების პრაქტიკულ განხორციელებას. ოტჟე, პრაქტიკული სწავლება მანქანების მიმაგრებაში არის კვალიფიციური სპეციალისტის მომზადების საფუძველი. Tsyy meti є ლაბორატორიულ-პრაქტიკული რობოტები დერმის თეორიული იმპლანტაციისთვის.
ლაბორატორიულ-პრაქტიკული დასაქმება იძლევა მანქანის რეგულირების პრაქტიკულ სწავლებას, სხვადასხვა მექანიზმების, შეკრებებისა და სატრანსპორტო სისტემების შერჩევისა და შერჩევის გაცნობის საშუალებას.
ლაბორატორიული სემინარი შეიძლება გამოყენებულ იქნას, რათა დაგეხმაროთ სამუშაოს შესრულებაში, პროპონირებული ლაბორატორიულ-პრაქტიკული რობოტების გამო. რობოტების მონახულებამდე აუცილებელია თეორიული ბლოკის წაკითხვა და რობოტების წარსადგენი თეორიული მასალის გამოცნობა. რობოტის საათამდე და მისი გასვლის შემდეგ დაიმახსოვრეთ ყველა მონაცემი კონტროლისთვის. რობოტიკის განსახორციელებლად და ყველა ცნობილი ადამიანის რეგისტრაციისთვის საჭიროა დარეგისტრირდეთ სპეციალურად შეყვანილი სტრიქონით და გააგზავნოთ გამარჯვებები გადასინჯვისთვის და გათვალისწინებულ იქნას გამარჯვებების თეორიული ელექტრომომარაგების, ან ტესტის შედეგების შესახებ. რობოტის ხელმოწერა ნიშნავს, რომ Viconan რობოტი იკვებება და ამტკიცებს პრაქტიკული ვივჩენიით, რომელიც მოცემულია იმ ნემანების მიერ, მოსწავლის, რომელიც მზად არის მიიღოს პრაქტიკული დიეტა.
ყველა რობოტის გამარჯვება არის სტუდენტის კანის რობოტების ხელმოწერების გამოვლინება є obovazkovuyu გონებრივი დაშვება ბავშვის ჯანმრთელობის დასაკეცი.
უსაფრთხოების ტექნოლოგიის ზოგადი წესები
ლაბორატორიულ-პრაქტიკულ რობოტებთან სტუმრობისას ტრავმებისა და უბედური vipadk_v-ის თავიდან ასაცილებლად, აუცილებელია შეტევის დაჭერა შტაბის წესებიუსაფრთხოების ტექნოლოგია:
1. სანამ ლაბორატორიულ-პრაქტიკულ რობოტებს დაიშვებიან სტუდენტების ჩამორთმევა, რომლებმაც თეორიულად ისწავლეს თემა, რომლისთვისაც რობოტი უნდა განხორციელდეს, გავლილი აქვთ უსაფრთხოების ტექნოლოგიის ინსტრუქცია.
2. ერთი საათის განმავლობაში რობოტებს უნდა შეეძლოთ ინსტრუმენტის გამოყენება.
3. მანქანის მექანიზმებისა და სისტემების ნაწილების ჩაკეტვა, როგორ უნდა შეფუთვა და გადაადგილება.
4. მექანიზმების შერჩევისას ჩართულია ზამბარები, რომელთა დიზაინში შედის ზამბარები (ცალკე სარქველები, გალვანზირებული ცილინდრები, გალვანზირებული კამერები), ამიტომ ფრთხილად ვიქნებით ზამბარის ჩანგლის გაერთიანებაზე.
5. მანქანის მნიშვნელოვანი ნაწილების, მექანიზმებისა და შეკრებების მონტაჟი, დემონტაჟი და გადაადგილება უნდა განხორციელდეს მხოლოდ კვირის წინ და არანაკლებ (ორი ცვლილება, ერთი შიში).
6. ერთი საათის განმავლობაში თქვენ შეძლებთ იმუშაოთ ელექტრული ინსტალატორიდან გასაღებების დასაკავშირებლად dzherel strum-თან, მაგრამ მოგიწევთ ლოდინი გადამრთველის არსებობამდე. აკუმულატორის გამოცვლისას არ დაუშვათ ელექტროლიტი იმავე შკირაზე დაეცეს. თუ ელექტროენერგიას ეკრანზე მოხვდებით, წყლის ნაკადით დაიკარგებით.
7. აკრეფისას, რომელშიც შეიძლება იყოს ცნობილი ექსპლუატაციის რიდინი (გალმივნა რიდინა, ანტიფრიზი ტოშო), ჩვენ ვიზრუნებთ ისე, რომ შკირასა და ოდიაგზე ციჩ რიდინი ვერ მოვიშოროთ. თუ ექსპლუატაციის რიდინი მოხვდება ცისლათში, ადვილია მისი მოშორება წყლის ნაკადით.
8. როდესაც რობოტები ცეცხლსასროლი და ღვეზელი მასალებით (საწვავი სისტემების დანართების დალაგება, საღარავი სისტემები და ძალიან ცოტა), ეს განსაკუთრებით უნდა გაკეთდეს.
რეგულაციები უსაფრთხო(არ დახუროთ სამუშაოსთან ახლოს და ნახეთ ცეცხლში)
9. ლილვების მოტრიალებამდე და ნაწილების და მექანიზმების გადართვამდე, რომელიც იშლება, მაშინ ბრიგადის თანამებრძოლებმა უნდა იმოძრაონ ოპერაციის ბორბალზე ხელთ მოტანილი სასიმღერო ნაწილებით ან მანქანის მექანიკით.
ლაბორატორიულ-პრაქტიკული რობოტი No1
Vlashtuvannya ამწე მექანიზმი Meta დაკავებულია: vivchity პრაქტიკულად prist_y ამწე
mechanizmu, znayomitisya s priyomami razbyrannya და დასაკეცი.
ფლობა და ხელსაწყოები:დვიგუნი სტენდის ღობეზე; ძირითადი ნაწილების ნაკრები KIIIM; პლაკატი "Crank მექანიზმი"; ლაბორატორიული სახელოსნო; ჩაქუჩები, ჩაქუჩები, pliers, wrenches, კომპლექტი.
თეორიული ბლოკიამწე-შემაერთებელი ღეროს ნიშნების მექანიზმი მბრუნავი დგუშის ლილვის ხელახალი ადაპტაციისთვის ლილვის ოვალურ ლილვზე. ამწე-შემაერთებელი ღეროს მექანიზმი ინახება მოუწესრიგებელი და მკაცრი ნაწილებისგან. KShM ბლოკის კარკასის უმართავი ნაწილები, ბლოკის თავი, ამწე, ცილინდრის ლაინერები, ბლოკირების ხრახნები, სამაგრი ნაწილები (კაკალი, ჭანჭიკები, საკინძები), ბლოკის შუასადებები, სამაგრები, ბუჩქები ლილვზე. KShM-ის ფხვიერი ნაწილები, დგუში, დგუშის რგოლები (კომპრესორი და ზეთის რგოლები), დგუშის ქინძისთავები, შემაერთებელი ღერო, ამწე ლილვი, ჩასმული რგოლები, მფრინავი, დამაკავშირებელი ღეროს ზედა თავის ბუჩქი, საკეტი რგოლები.
ცილინდრების ბლოკზე დამონტაჟებულია ცილინდრული სამაჯურები. ბლოკის თავი თხილით არის მიმაგრებული ბლოკზე დამატებითი საკინძების უკან. ბლოკსა და ბლოკის თავსა შორის დამონტაჟებულია მეტალო-აზბესტის შუასადებები. ბლოკზე თავის შესაკრავის თხილს ამაგრებს ზუსილი, რომელსაც არეგულირებს ვირობნიკი მცენარე. თხილის ფხვიერი გამკაცრება ბლოკზე თავის დასამაგრებლად
დააწვას ცილინდრები და შუასადებები მანამ, სანამ ცილინდრები არ დაირღვევა. ბლოკზე თავის დასამაგრებლად თხილის დაჭიმვა ხორციელდება ბოლოში: თავის ცენტრიდან პერიფერიამდე (სპირალი). კარკასის ქვედა ნაწილი ხურავს ბლოკს ბოლოში. პასტელ ბლოკზე, დამატებითი ფესვის საკისრების (ჩანართების) და їх დამსხვრევის უკან, დამონტაჟებულია ლილვის ნაწილების რაოდენობა. ცილინდრის ბლოკზე არის დგუშები კომპრესორით და ზეთით შეზეთილი დგუშის რგოლებით. დგუშის ქინძის უკან, დგუში დაჭერილია დამაკავშირებელი ღეროს ზედა თავსა. ღერძული მოძრაობიდან, დგუშის ქინძისთავი იჭრება დამჭერი რგოლებით, დგუშის მძივების მოხვევებთან ახლოს. შემაერთებელი ღეროების საკისრების (ჩანართების) დახმარების უკან ქვედა შემაერთებელი ღეროს თავი დახურულია. კოლინარული ლილვი... საფრენი ბორბალი მიმაგრებულია ლილვის უკანა ფლანგზე. დგუშის სწორი მონტაჟი ნაჩვენებია ისრით და ის პირდაპირ ძრავის წინა მხარესაა. პირველ საჭრელზე და კრიტიკულ ქვედა თავზე შემაერთებელი ღეროს დაყენების სისწორის უზრუნველსაყოფად უნდა მოხდეს ტკიპა გატეხილი, რომელიც ხარვეზის დადგენისას სწორდება ძრავის წინა ნაწილზე. დგუშის რგოლები დამონტაჟებულია ისეთ რანგში, ისე, რომ საკეტები ერთიდან მეორემდე ირხეოდა სასიმღერო ჭრილებით, მაგრამ უმეტეს შემთხვევაში ისინი არ იყვნენ ერთსა და იმავე ვერტიკალურ ზონაში (კამერიდან გაზის გარკვეული რაოდენობის შემთხვევაში, ხანძარი. მოხმარებული იყო ძრავის კარტზე). დგუშის რგოლებში საკეტების ორმხრივი ვარდნა კუტი α იწყება შემდეგი ფორმულით:
de n - კომპრესორის რგოლების რაოდენობა დგუშებზე.
Pidgotuvati სინოფსისი და გადადით ლაბორატორიის პრაქტიკულ ნაწილზე - პრაქტიკული რობოტი.
ვიზიტორის რობოტების შეკვეთა:
პიდგოტუვატი დერმალური ქირურგიის წინ ტექნოლოგიური ხარისხიკომპანია.
Ოპერაცია | ტექნოლოგია vikonannya | ინსტრუმენტი |
1.1. ხრახნიანი თავში შესაკრავი თხილი | ||
თავის ბლოკი | ცილინდრის ბლოკები. | |
ცილინდრები. | 1.2. წაიღეთ საკინძების თავი ბლოკთან. | |
1.3. წაიღეთ თავსაბურავი ბლოკში. | ||
2.1. ჩართეთ dvigun piddon | ||
crankcase up. | ||
2.2. ხრახნიანი ჭანჭიკები | ||
2.3. აიღეთ იოგოს შუასადები. | ||
3.1. ლილვის ნაწილების რაოდენობის გადაქცევა, | ||
ჩასვით 1-ლი ცილინდრის დგუში | ||
3.2. ხრახნიანი ქვედა სამაგრის ჭანჭიკები | ||
დამაკავშირებელი ღეროების თავები. | ||
3.3. აიღეთ დამაკავშირებელი ღეროს ქვედა ბოლო | ||
დამაკავშირებელი წნელები. | ||
3.4. მიამაგრეთ დგუში შემაერთებელი ღეროთი | ||
ცილინდრი. | ||
4. პიკაპი | 4.1. Zakrіpiti დამაკავშირებელი ღერო კაპარჭინაზე. | |
4.2. Vityagti საკეტი pliers | ||
დგუში | თვალის ჩაკვრა | |
ჯგუფი 1-ლი | 4.3. დააინსტალირეთ დგუშის პინი z | |
ცილინდრი. | დგუშის ბოსი და ქვედა თავი | |
4.4. აიღე კომპრესორი | ||
ზეთის დგუშის რგოლები | ||
ვიკონატის სასაწყობო ოპერაციები, | ||
მბრუნავი ოპერაციები 4.4, 4.3, 4.2, 4.1. | ||
დგუში | ||
6. მონტაჟი | ვიკონატის სასაწყობო ოპერაციები, | |
დგუში ს | მბრუნავი ოპერაციები 3.4, 3.3, 3.2, 3.1. | |
შემაერთებელი ღერო | ||
7. მონტაჟი | ვიკონატის სასაწყობო ოპერაციები, | |
მბრუნავი ოპერაციები 2.3, 2.2, 2.1. | ||
8. მონტაჟი | ვიკონატის სასაწყობო ოპერაციები, | |
მიემართება ბლოკისკენ. | მბრუნავი ოპერაციები 1.3, 1.2, 1.1. | |

Zavdannya ხმის
1. დარეგისტრირდით ნუმერაციაზე(1-10) ამწე მექანიზმის დეტალები (ნახ. 1.1)
მალუნოკი 1.1. დამაკავშირებელი ღერო
2. წაიკითხეთ კლერკისგან ადვილად (ნახ. 1.2.) დგუშის ჯგუფის ნაწილის ნომერი, რომელიც გადაეცემა აღწერს.
ბრინჯი. 1.2. დგუშის ჯგუფი:
1 - დგუში; 2 - ნავთობის კვლევა დგუშის რგოლი; 3 - კომპრესორის დგუშის რგოლი; 4 - საკეტი ბეჭედი; 5 - დგუშის პინი
დაარსების ფედერალური სააგენტო
SUPERIOR განათების მონტაჟი
VISCHOЇ PROFESSIONO EVOLVE
დონსკის დერჟავნიის ტექნიკური უნივერსიტეტი
დეპარტამენტი "სატრანსპორტო საშუალებების მომსახურება და ტექნიკური ექსპლუატაცია"
ლაბორატორიული რობოტების წარდგენის მეთოდური ინსტრუქციები დისციპლინაში "ლაბორატორიული სახელოსნო მანქანის მშენებლობისთვის".
დონის როსტოვი
უკლადაჩი: ასოც., ფ.
ასოცირებული პროფესორი, ფ.
მანქანის აწყობის ლაბორატორიული სემინარი. მეთოდური ინსტრუქციები. DDTU. -დონის როსტოვი: ხედი. ცენტრი DDTU, 2011 .-- 13გვ.
შენახვის მეთოდური ინსტრუქციები და კონტროლის პროცედურები, მდე როუმინგის პროგრამადისციპლინა „სუვერენული რეგიონის ორგანიზება და კონტროლი ტექნიკური ბანაკიმანქანები“. მეთოდური ინსტრუქციები და საკონტროლო ტესტები გარე სტუდენტებისთვის 190600 "სატრანსპორტო და ტექნოლოგიური მანქანებისა და კომპლექსების ექსპლუატაცია" და სპეციალობები 190603 "სატრანსპორტო და ტექნოლოგიური მანქანების მომსახურება და ფლობა (საავტომობილო ტრანსპორტი)".
გახდი ფაკულტეტის მეთოდური კომიტეტის მეგობარი “Aviabuduvannya. ტრანსპორტი, მომსახურება და ექსპლუატაცია"
რეცენზენტ პროფესორი
Vidavnichy Center DDTU, 2011 წ.
შესვლა
1. სტუდენტების მიერ დისციპლინის მეთოდით є vivchennya მიამაგრონ მანქანის სისტემებისა და შეკრებების პრინციპი, ახალი უნივერსიტეტების აწყობის, მანქანის აწყობის პრაქტიკული დაუფლების პროცედურას, რობოტის პარიკის აგება ხელსაწყოებით და დანართებით. .
დერმალური ლაბორატორიული რობოტის სტრუქტურა ინახება 7 ნაწილად, საიდანაც წერილობით გამოსახულია "Zmist svytu" პორციები, ხოლო "Control Nutrition" ნაწილებს იყენებენ სტუდენტის პირველად მოსამზადებლად.
მანქანის მოდელი vivchennya yogo სისტემებისთვის და მექანიზმებისთვის სტუდენტების მიერ ვიბრირებენ სპირალურად ვიკლადით.
ასო ნაწილი (zvit) ინახება საწყისი წერტილებიდან:
1. ლაბორატორიული რობოტების თემა
3. მეტა რობოტები
5. აკონტროლეთ საკვები
6. პრაქტიკული რობოტი
7. დამატებითი მასალა
2. ვიმოგი რობოტის რეგისტრაციამდე
3. მეტა რობოტები: Vivchit და დიზაინი, რობოტი და ტექნოლოგია კარდანის მექანიზმების აკრეფისა და დასაკეცი, თავსაბურავირომ დიფერენციალი.
4.1 კარდანის გადაცემა: აღნიშვნა, დიზაინი, რობოტი.
4.2 თავსაბურავი: დიზაინი, დიზაინი, რობოტი.
4.3 დიფერენციალი: აღნიშვნა, დიზაინი, რობოტი.
4.4 ძირითადი ხარვეზები.
5. აკონტროლეთ საკვები:
5.1 კარდანის სახსარი: რობოტის და ორი სახსრის აღნიშვნა.
5.2 კარდანის ლილვის მოქნილი შეერთება: აღნიშვნა, პრიზმა.
5.3 სლაინების მინიჭება კარდანის ლილვზე.
5.4 სათავე მექანიზმის წინამორბედი და ამოძრავებული მექანიზმების ღერძების შესუსტების მიზეზი.
6. პრაქტიკული რობოტი: კარდანის ლილვის დემონტაჟი, დიფერენციალური თანამგზავრების შეცვლა.
7. დამატებითი მასალა:
7.1 ლიტერატურა.
7.3 კარდანის ლილვის მოდელი, თავსაბურავი, დიფერენციალი.
7.4 პლაკატები
ლაბორატორიული რობოტი No8
1. თემა: Keruvannya სისტემა.
2. როზდილი: კერუვანიას საჭე.
3. მეტა რობოტები: Vivify დიზაინი, რობოტი და ტექნოლოგია სხვა უნივერსიტეტებისა და დეტალების ჩანაცვლებისთვის.
4.1 ძირითადი კონტროლის რობოტის აღნიშვნა და დიზაინი უკანა ამძრავიანი მანქანებისთვის.
4.2 წინა ამძრავიანი მანქანების დანიშვნა, დიზაინი და რობოტული კონტროლი.
4.3 უნიფიკაციის მეთოდის მიზეზების ძირითადი ხარვეზები (ცხრილი)
4.4 ქანქარის ბუჩქების გამოცვლის ტექნოლოგია.
5. აკონტროლეთ საკვები:
5.1 Worms kermovs მექანიზმები, მინიჭებული ამ რობოტის მიმაგრებაზე.
5.2 Reikovі kermovі mechanizmi, მინიჭებული ამ რობოტის დანართზე.
5.3 Kermovy drive, რობოტის ძირითადი ელემენტები.
5.4 Kulovі shanіri: ნიშანი, ბუდოვა, რობოტი.
6. პრაქტიკული რობოტი: ქანქარის ბუჩქების შეცვლა.
7. დამატებითი მასალა:
7.1 ლიტერატურა.
7.2 სალუსარული ინსტრუმენტის ტიპი.
7.3 საჭის მოდელი.
7.4 პლაკატები
ლაბორატორიული რობოტი No9
წლების რაოდენობა: საკლასო ოთახი დატვირთული -4, თვითნაბიჯი რობოტი -2
1. თემა: Keruvannya სისტემა.
2. როზდილი: გალმა.
3. მეტა რობოტები: Vivchit-ის დიზაინი, რობოტი და ტექნოლოგია ცვლის ოკრემიხის უნივერსიტეტების გალმს.
4.1 სისტემა გამა, ვიდი, ბუდოვა რომ რობოტი.
4.2 კოლოჩნი გალმა, ბუდოვა, რობოტი.
4.3 დისკები Galma, Budova, Robot.
4.4 ბალიშების და თავის გალვანური ცილინდრის გამოცვლის ტექნოლოგია.
4.5 ძირითადი ხარვეზები, უუნიფიკაციის მეთოდების მიზეზები.
5. აკონტროლეთ საკვები:
5.1 პარკირების გალმო: რობოტის მიმაგრების აღნიშვნა.
5.2 თავი გალვანზირებული ცილინდრი: ამ რობოტზე მიმაგრების ნიშანი.
5.3 რობოტის ცილინდრები: რობოტის ნიშანი.
5.4 მარეგულირებელი ვიზა: აღნიშვნა, pristіy, რობოტი.
5.5 ვაკუუმი პიდსილუვაჩი, აღნიშვნა, პრიზმა, რობოტი.
6. პრაქტიკული რობოტი: წინა და უკანა ბალიშების გამოცვლა, თავი გალვანზირებული ცილინდრი.
7. დამატებითი მასალა:
7.1 ლიტერატურა.
7.2 სალუსარული ინსტრუმენტის ტიპი.
7.3 გალავანიზებული სისტემის განლაგება.
7.4 პლაკატები
ლაბორატორიული რობოტი No10
წლების რაოდენობა: საკლასო ოთახი დატვირთული -4, თვითნაბიჯი რობოტი -2
1. თემა: ჩოდოვა ჩასტინ.
8. Rozdil: წინა და უკანა გვერდითი პანელები.
9. მეტა რობოტები: Vivchit pristіy რომ პრინციპი dії ідвісок.
10.1 მითითებების მინიჭება, რობოტის დამაგრება წინა სლაიდერზე.
10.2 უკანა პანელი, რომელიც იგივეა რობოტისთვის.
10.3 წინა პროგნოზებისა და ტირილის მეთოდების ძირითადი ხარვეზები.
10.4 ამორტიზატორის და უკანა დაკიდების ღეროების დამაგრების და დასაკეცი ტექნოლოგია.
11. აკონტროლეთ საკვები:
11.1 ამორტიზატორი: შექმნილია რობოტის დასამაგრებლად.
11.2 თითის წვერები: აღნიშვნა ამ რობოტის მიმაგრებისთვის.
11.3 ტელესკოპური სტილი: რობოტის მახასიათებელი.
11.4 ბარები და სტაბილიზატორები: აღნიშვნა, პრიზმა, რობოტი.
12. პრაქტიკული რობოტისთვის: Razbirannya და ამორტიზატორის და უკანა საკიდის ღეროების დაკეცვა.
13. დამატებითი მასალა:
13.1. ლიტერატურა.
13.2 სალუსარული ინსტრუმენტის სახეობა.
13.3 განლაგება.
13.4 პლაკატები
ლაბორატორიული რობოტი No11
წლების რაოდენობა: საკლასო ოთახი დატვირთული -4, თვითნაბიჯი რობოტი -2
1. თემა: ჩოდოვა ჩასტინ.
2. როზდილი: კეროვანის ბორბლები.
3. მეტა რობოტები: გააცოცხლეთ კონსტრუქციული მახასიათებლები, რობოტები და ტექნოლოგია კეროვანებში ელემენტების ჩანაცვლებისთვის.
4.1 ფორმის ბორბლები, რობოტების ძირითადი ელემენტები.
4.2 Pokrishki, vidi, priznachennya, budova რომ რობოტი.
4.3 Hub, priznachennya, budova რომ რობოტი.
4.4 კეროვანების ცოდნის ტექნოლოგია, გადასაფარებლების გამოცვლა.
4.5 თანხის დაბალანსება.
5. აკონტროლეთ საკვები:
5.1 დამცავი: რობოტის დანართის აღნიშვნა.
5.2 დიაგონალური და რადიალური ტვინის დაფესვიანება (დაბალი პროფილის საბურავები): აღნიშვნა რობოტის მიმაგრებისთვის.
5.3 მონახულებული და სამგზავრო მანქანების რაოდენობის დათვალიერება.
6. პრაქტიკული რობოტი: კეროვანი კოლის ხატვა და კრეფა.
7. დამატებითი მასალა:
7.1 ლიტერატურა.
7.2 სალუსარული ინსტრუმენტის ტიპი.
7.4 პლაკატები.
ლაბორატორიული რობოტი No12
წლების რაოდენობა: საკლასო ოთახი დატვირთული -4, თვითნაბიჯი რობოტი -2
2. როზდილი: Dzherela struma.
3. მეტა რობოტები: Vivchiti pristіy, რობოტი და ტექნოლოგია ცვლის ელექტრო ინსტალაციის ელემენტებს.
4.1 აკუმულატორის ბატარეა, აღნიშვნა, მიმაგრება რობოტზე.
4.2 გენერატორი, დანიშნულება, რობოტის.
4.3 გენერატორის დასაკეცი და გადმოტვირთვის ტექნოლოგია.
4.4 ძერელ სტრუმის ძირითადი უთანასწორობა და їხ უსუნენიის მეთოდები.
5. აკონტროლეთ საკვები:
5.1 ბატარეის დატენვის დონის რეკონსტრუქცია.
5.2 აკუმულატორის ბატარეის დატენვა და ელექტროენერგიის გასწორება.
5.3. გენერატორის ხელახალი გაყვანის მახასიათებლები სტენდზე.
5.4 ზამბარების რეგულატორი, რობოტის აღნიშვნა, ბიუჯეტირება.
6. პრაქტიკული რობოტისთვის: გენერატორის გახსნა და დაკეცვა.
7. დამატებითი მასალა:
7.1 ლიტერატურა.
7.2 სალუსარული ინსტრუმენტის ტიპი.
7.4 პლაკატები
ლაბორატორიული რობოტი No13
წლების რაოდენობა: საკლასო ოთახი დატვირთული -4, თვითნაბიჯი რობოტი -2
1. თემა: Elektroustatkuvannya მანქანა.
2. როზდილი: კეთილი იყოს თქვენი მობრძანება სტრუმაში.
3. რობოტების მეტა: ვივჩიტი არის ნიშანი, ბუდოვი, რობოტი და სტრუქტურის კრეფის და დაკეცვის ბოლო.
4.1 პერეაჰუვატი სტრუმის ძირითადი ხედები და მათი მახასიათებლები.
4.2 რობოტის დამწყები, აღნიშვნა, მიმაგრება.
4.3 სტარტერის აწევა და დაკეცვა.
4.4 სტარტერის ძირითადი ხარვეზები გამოწვეულია їх უსუნენიის მეთოდებით.
4.5 ფარების რეგულირების მეთოდები.
5. აკონტროლეთ საკვები:
5.1 ხილვადობა, ძირითადი ელემენტები, їх აღნიშვნა, ბუდოვა, ელექტრული წრე.
5.2 სიგნალიზაცია, ძირითადი ელემენტები, აღნიშვნა, პარამეტრი, ელექტრული წრე.
5.3 საქარე მინის გაწმენდა, სუფთა, გაყვანილობის დიაგრამა.
5.4 საბორტო სისტემაკონტროლი, ძირითადი ელემენტები, ელექტრული შეერთების წრე, პრინციპი
6. პრაქტიკული რობოტი: აიღეთ და დაკეცეთ გენერატორი და დამწყები.
7. დამატებითი მასალა:
7.1 ლიტერატურა.
7.2 სალუსარული ინსტრუმენტის ტიპი.
7.4 პლაკატები
ლიტერატურა
1., რომ ში. მიამაგრეთ მანქანა. M: მანქანები. 2007.532 ს.
2.ტა ინ. მიამაგრეთ მანქანა. Pidruchnik M: მანქანათმშენებლობა. 2008 წ.335 წ.
3. ნათესავები და მანქანები. M: Kolos, 2006 336 გვ.



